

3.16. Определение места самолета по одной радиостанции
В соответствии с обобщенным методом линий положения для определения МС необходимо два навигационных параметра и две соответствующие им линии положения. Казалось бы, что если радиостанция только одна, определить МС невозможно, поскольку в любой момент времени можно определить только один параметр (пеленг самолета).
На самом деле определить МС можно и по одной радиостанции, но только благодаря тому, что ВС движется. Для неподвижного объекта (например, зависшего вертолета) этот способ не годится.
Идея способа основана на том, что во время полета пеленг изменяется и можно построить две ЛРПС, относящиеся к разным моментам времени Т1 и Т2. Очевидно, что в момент Т1 самолет находился в какой-то из точек первой ЛРПС. Если между этими моментами самолет летел с постоянным курсом, то множество точек, в которых он может находиться в момент Т2, представляет собой прямую, параллельною первой ЛРПС и смещенную от нее в ту сторону, в которую летел самолет, и на такое расстояние, которое он пролетел за это время. Следовательно, первую ЛРПС нужно сместить параллельно самой себе. Но чтобы сместить прямую линию, достаточно сместить одну из ее точек и провести через нее параллельную линию. Таким образом первая ЛРПС как бы приводится к моменту времени Т2. И эта смещения ЛРПС пересечется со второй ЛРПС в МС.
Порядок определения МС по одной радиостанции следующий (рис.3.43).
1) Настроить АРК и убедиться в правильности настройки.
2) Отсчитать МК и КУР, включить секундомер.
3) Выполнять полет с постоянным курсом.
4) Через некоторое время, когда КУР изменится хотя бы на 30º (а это и есть угол пересечения ЛРПС), остановить секундомер, отсчитав по нему время t, записать КУР и текущее время по бортовым часам.
5) Рассчитать два ИПС для каждого момента времени и проложить обе ЛРПС на карте. Ввиду невысокой точности способа угол схождения не учитывается.
6) Рассчитать
ФИПУ=МК+УС+ΔМ
и расстояние, пройденное за время t:
S=Wt.
Расчет удобно выполнить на НЛ-10.
7) На первой ЛРПС выбрать любую точку и с помощью транспортира провести из нее линию в направлении ФИПУ. Будет точнее, если это точка пересечения ЛРПС с одним из нанесенных на карте меридианов (удастся точнее приложить транспортир). На этой линии отложить рассчитанное расстояние S и через полученную точку провести линию, параллельную первой ЛРПС.
8) МС будет находиться в точке пересечения смещенной ЛРПС со второй ЛРПС. Это МС будет относиться к моменту времени Т2, зафиксированному в штурманском бортовом журнале.
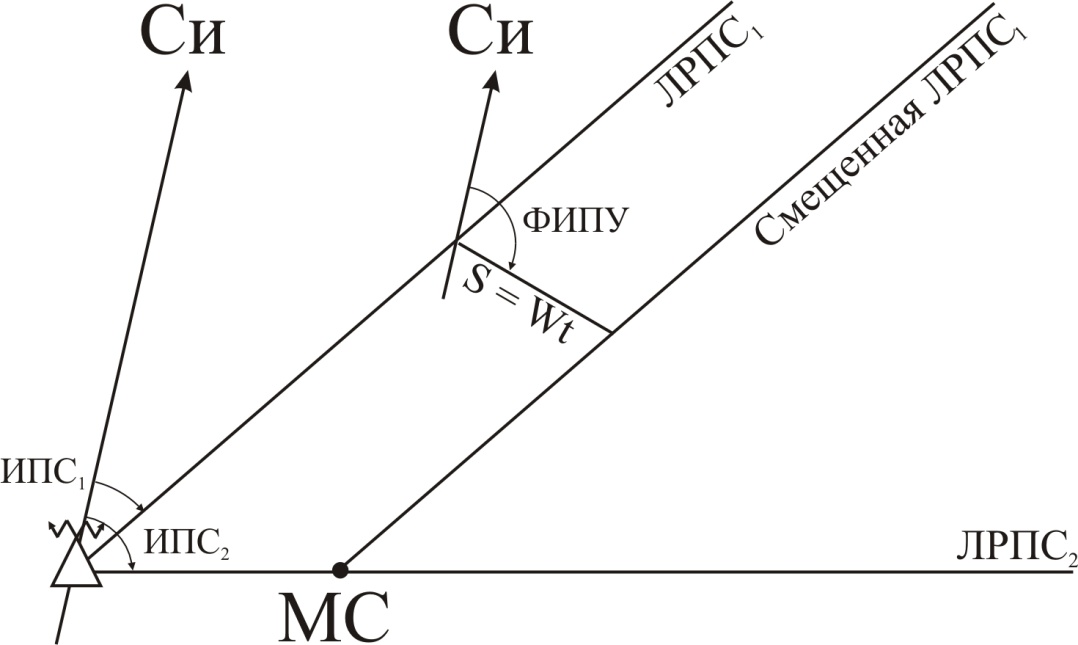
Рис. 3.43. Определение МС по одной радиостанции
На точность определения МС будут влиять те же факторы, которые перечислены в предыдущем параграфе. Но к ним добавятся и другие – точность расчета ФИПУ и путевой скорости, дополнительная графическая работа на карте, связанная со смещением ЛРПС…
Пожалуй, такой способ определения МС целесообразно применять лишь в том случае, когда других способов не остается. Уж слишком неточным может оказаться результат.