

3.13. Прокладка лрпс на карте
Истинный пеленг самолета, расчету которого был посвящен предыдущий параграф, это угол между северным направлением истинного меридиана РНТ и направлением на МС по ортодромии на земной сфере. Но если пилот собирается прокладывать ЛРПС, то он будет это делать на карте. А карта – это плоское изображение земной поверхности.
Как уже не раз отмечалось, на не слишком больших расстояниях ортодромию (ЛРПС) допустимо изображать на карте в виде прямой линии. Аэронавигационные карты специально создают в таких проекциях, чтобы это было возможным. Картографическая проекция – это способ отображения сферической Земли на плоскости и этот способ обычно выражается формулами, которые выражают связь координат точек на сфере и на плоской карте.
Строго говоря, существует только один класс проекций (центральные азимутальные проекции), в которых ортодромия абсолютно точно изображается прямой линией, но в таких проекциях полетные карты не издают, поскольку у них много других недостатков. А на тех картах, которые используются для выполнения полетов, ортодромия, строго говоря, не является прямой линией, хотя и очень близка к ней. Поэтому, если на карте отложить ЛРПС в виде прямой линии в направлении ИПС, рассчитанного для сферы (обозначим его ИПСсф – о его расчете и шла речь в предыдущем параграфе), то она не пройдет через МС. Ведь ЛРПС на карте на самом деле кривая. А чтобы эта прямая прошла через МС, необходимо отложить ее в другом направлении, которое обозначим ИПСкар. Для его расчета нужно учитывать не угол схождения меридианов на сфере, а угол схождения меридианов на конкретной карте.
Напомним, что угол схождения меридианов на сфере в двух точках (например, РНТ и МС) – это разность путевых углов ортодромии, проходящей через эти точки.
А угол схождения меридианов на карте – это в прямом смысле угол между меридианами этих точек на карте. В принципе его можно измерить, если продлить меридианы на карте до их точки пересечения (пусть она даже окажется за пределами листа карты). Но можно измерить его и проще: если провести через эти две точки прямую линию, то она будет пересекать меридианы этих точек под разными углами. Их разность и называют углом схождения меридианов на карте.
К сожалению, угол схождения меридианов на карте зависит не только от разности долгот двух точек, но и от вида проекции карты и охватываемого ею района. В настоящее время чаще всего для полетов используются карты в равноугольной конической проекции (проекции Ламберта). В такой проекции издают отечественные маршрутные радионавигационные карты (РНК), выпускаемые Центром аэронавигационной информации, а также большинство маршрутных карт фирмы Джеппесен. На этих картах обязательно указываются широты двух так называемых стандартных параллелей (на РНК они почему-то названы опорными) (рис. 3.36 и 3.37).
С достаточной для практики точностью можно считать, что угол схождения меридианов на такой карте пропорционален синусу средней широты, но средней широты не двух наших точек, а средней арифметической широт стандартных параллелей (обозначим ее φ0), то есть
δсх.кар=Δλsin φ0. (3.5)
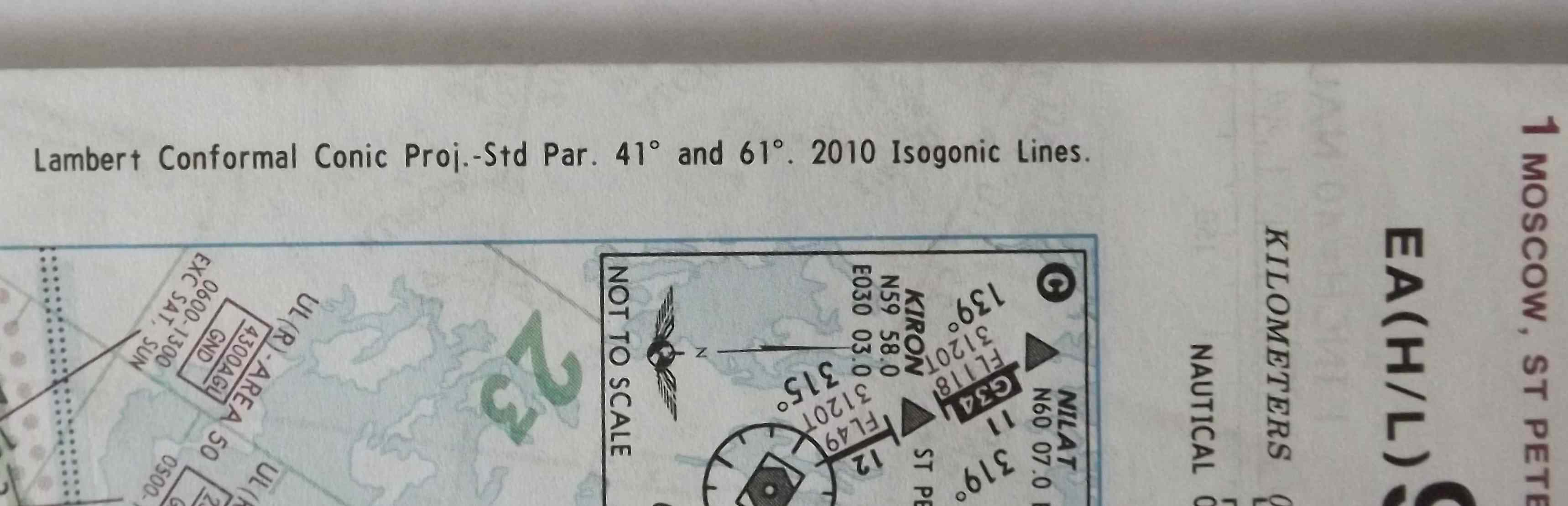
Рис. 3.36. Широты стандартных параллелей, указанные на карте Джеппесен

Рис. 3.37. Широты стандартных параллелей, указанные на радионавигационной карте
Например, для карты на рис. 3.36 можно принять φ0=(41+61)/2=51º, а для карты на рис. 3.37 φ0==(54+72)/2=63º. На самом деле φ0 рассчитывается по более сложным формулам и более точный расчет дает значения соответственно 51º22' и 63º30' , но для практики различие не играет роли. Чем больше средняя широта РНТ и МС отличается от φ0, тем больше разница ИПСсф и ИПСкар.
Таким образом, при расчете ИПС для прокладки ЛРПС на карте следовало бы рассчитывать угол схождения меридианов по формуле (3.5).
Но анализ показывает, что разность ИПСсф и ИПСкар для дальностей от РНТ до 200-300 км в большинстве случаев не превышает 0,5º. Учитывая невысокую практическую точность измерения углов транспортиром, этим можно пренебречь.