

3.12. Расчет истинного пеленга самолета
Для решения некоторых навигационных задач, например, для определения МС, необходимо проложить на карте ЛРПС. Для этого необходимо сначала определить пеленг самолета. Поскольку на любой карте нанесены обычные географические меридианы, называемые в навигации истинными, и именно к ним будет прикладываться транспортир, то речь идет о расчете истинного пеленга самолета (ИПС).
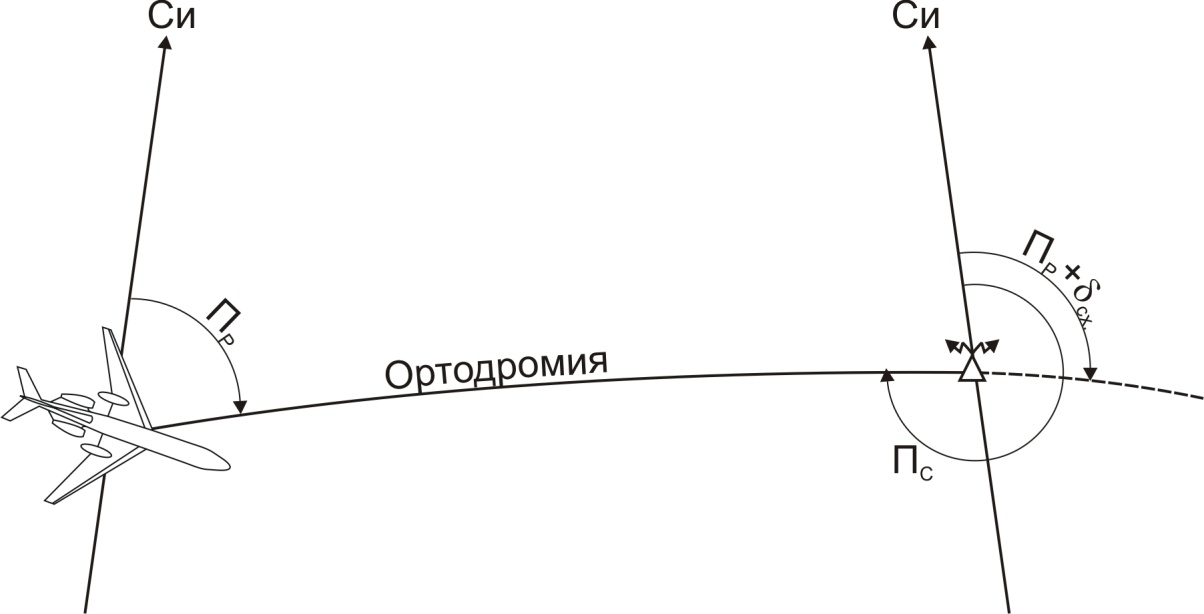
Рис. 3.35. Связь между пеленгом самолета и пеленгом радиостанции
Очевидно, что магнитный пеленг самолета можно определить как
МПС=МК+КУР±180.
Как было показано ранее, этот МПС – это направление от РНТ на самолет, измеренное от магнитного меридиана места самолета (поскольку именно от него измерен МК, используемый для расчета МПС). Но ведь на карте нужно проложить ЛРПС на карте от истинного меридиана радиостанции. Следовательно, вновь возникает задача перехода от одного меридиана (магнитного меридиана МС) к другому (истинному меридиану РНТ).
Переход можно выполнить в соответствии с мнемоническим правилом. Для этого к МПС нужно прибавить магнитное склонение в точке расположения ВС (поскольку именно от меридиана МС известен МПС) и учесть угол схождения меридианов, чтобы перейти от истинного меридиана МС к истинному меридиану РНТ.
Расчет с помощью мнемонического правила более удобен и надежен на практике. Если же записать именно формулу для расчета ИПС, она будет выглядеть следующим образом:
ИПС=МК+КУР±180+ΔМ+(λр-λ)sin φср,
где ΔМ – магнитное склонение в районе нахождения МС;
λр - долгота радиостанции;
λ – долгота МС;
φср – средняя широта (РНТ иМС).
В этой формуле первые три слагаемые – это и есть МПС, отсчитанный от меридиана МС (поскольку от него отсчитан МК). Последние два слагаемые обеспечивают переход от магнитного меридиана МС к истинному меридиану РНТ. И еще раз подчеркнем: долгота места самолета λ присутствует в формуле вовсе не потому, что именно там находится ВС, а потому что от этого меридиана измеряется МК!
Из данной формулы следует, что для расчета по ней ИПС необходимо иметь информацию о местонахождении МС (его широту и долготу, магнитное склонение). Но ведь ИПС для того и рассчитывают, чтобы определить МС и, следовательно, оно пока неизвестно. А оказывается, что для расчета ИПС уже нужно знать место самолета! Получается замкнутый круг.
Это является платой за то, что мы пытаемся проложить линию положения не для того навигационного параметра, который непосредственно измерили. Ведь суммированием курса и курсового угла радиостанции мы определяем пеленг радиостанции, который и является измеренным навигационным параметром. Но проложить на карте соответствующую ему линию положения (ЛРПР) трудно, поскольку она имеет сложную форму. Поэтому на практике мы с помощью Пр рассчитываем другой параметр – пеленг самолета (Пс), для которого построить линию положения легче. И для перехода от Пр к Пс как раз и нужна информация о МС, поскольку Пр отсчитан от меридиана МС.
На практике этот «замкнутый круг» не создает особых проблем, поскольку для расчета Пс с точностью до градуса не требуется высокой точности определения долготы и широты самолета, магнитного склонения. В большинстве случаев (за исключением разве что случаев потери ориентировки) пилот представляет себе район возможного нахождения ВС и может по карте определить хотя бы примерные значения координат и ΔМ.
А если для расчета пеленга использован не магнитный, а ортодромический курс? Очевидно, что ортодромический пеленг радиостанции
ОПС=ОК+КУР±180
отсчитывается от выбранного опорного меридиана. Но прокладывать ЛРПС нужно все равно от истинного меридиана РНТ! Следовательно, в этом случае нужно перейти от опорного меридиана к истинному меридиану радиостанции. Это также удобно сделать с помощью мнемонической схемы. Порядок перехода будет зависеть от того, какой меридиан выбран опорным (истинный или магнитный) и какого именно пункта. Интересно, что в этом случае информация о местоположении самолета для расчета ИПС вообще не понадобится. Ведь переход будет выполняться от опорного меридиана к меридиану РНТ, а где находится самолет - не имеет значения.
Например, если в качестве опорного меридиана выбран магнитный меридиан точки с долготой λ0 , например, аэродрома вылета, то
ИПС=ОК+КУР±180 +ΔМ0 +(λр-λ0)sinφср .
Предпоследнее слагаемое этой формулы обеспечивает переход от магнитного меридиана аэродрома вылета (он является опорным) к истинному меридиану этого аэродрома. А с помощью последнего слагаемого выполняется переход от истинного меридиана аэродрома к истинному меридиану РНТ.