

3.8. Исправление пути с углом выхода
Ранее в главе 1 уже был рассмотрен один из способов исправления пути – с выходом в ППМ. Но такой способ в гражданской авиации применим главным образом при небольших линейных уклонениях, например, не превышающих половины ширины трассы. Если же уклонение больше, то ВС, медленно приближающееся к ЛЗП, еще долго будет находиться за пределами трассы, что является нарушением правил использования воздушного пространства.
Другой способ исправления пути (исправление пути с углом выхода) заключается в расчете такого курса МКвых , который позволит быстрее выйти на ЛЗП, то есть еще до пролета конечного ППМ участка. Пилот сам решает, под каким углом направить продольную ось ВС к ЛЗП для выхода на нее. Этот угол называют углом выхода (Увых). Удобнее считать , что эта величина не имеет знака.
Наиболее часто выбирают Увых величиной от 20º до 40 º.
Поскольку Увых - это угол между ЛЗП и направлением продольной оси ВС при выходе на нее, то МКвых (направление оси ВС) отличается от направления ЛЗП (заданного путевого угла) на величину Увых. Таким образом
МКвых=ЗМПУ±Увых.
Какой знак выбрать в этой формуле, плюс или минус, пилот должен решить на основе здравого смысла. Понятно, что если самолет уклонился вправо, то следует взять курс меньше, чем ЗМПУ (довернуть влево), а если уклонился влево, то больше ЗМПУ (довернуть вправо).
Из данной формулы видно, что для расчета МКвых нет необходимости иметь какие-либо радиостанции на маршруте и не нужно знать даже величину уклонения от ЛЗП. Достаточно знать только сторону уклонения (вправо или влево) и самому выбрать Увых.
Но рассчитать МКвых недостаточно. Пилот должен еще суметь определить момент, когда самолет уже вышел на ЛЗП (пересекает ее). В противном случае самолет так и будет лететь с данным курсом, уже удаляясь от ЛЗП в противоположную сторону. Вот здесь и может пригодиться РНТ, расположенная в начальном или конечном ППМ участка маршрута. Для этого рассчитывается еще и КУРвых – это то значение КУР, которое будет иметь место при пересечении ЛЗП воздушным судном, следующим с МКвых.
На рис. 3.19 представлен случай, когда РНТ находится впереди на ЛЗП, а ВС выходит на ЛЗП с левой или с правой стороны. В момент пересечения ЛЗП в обоих случаях РНТ находится впереди под углом Увых от продольной оси ВС. Но в одном случае (при выходе с левой стороны) – слева, а в другом (при выходе с правой стороны) – справа. Оба эти случая могут быть описаны одной формулой:
КУРвых=360±Увых.
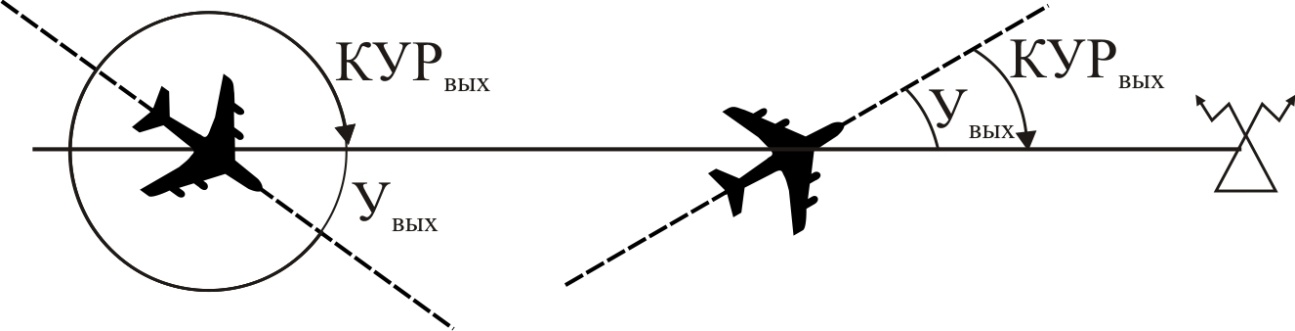
Рис. 3.19. Курсовой угол выхода при полете на РНТ
Например, если с Увых=30 самолет выходит на ЛЗП с правой стороны, то
КУРвых=360+30=30,
а если с левой
КУРвых=360-30=330.
Но все же надежнее пользоваться не формулами (они выветриваются из памяти), а полагаться на пространственное представление. Достаточно просто представить себе: в момент пересечения ЛЗП где находится РНТ? Слева или справа от продольной оси? Тогда нетрудно определить и КУРвых, потому что в обоих случаях он отличается от ноля на величину Увых.
Если РНТ находится сзади, то есть в начальном ППМ участка, то ситуация похожая. Если бы РНТ находилась строго в направлении хвоста самолета, то был бы КУР=180. Но ВС пересекает ЛЗП под углом Увых, поэтому и КУРвых отличается от 180 на эту величину (рис. 3.20).
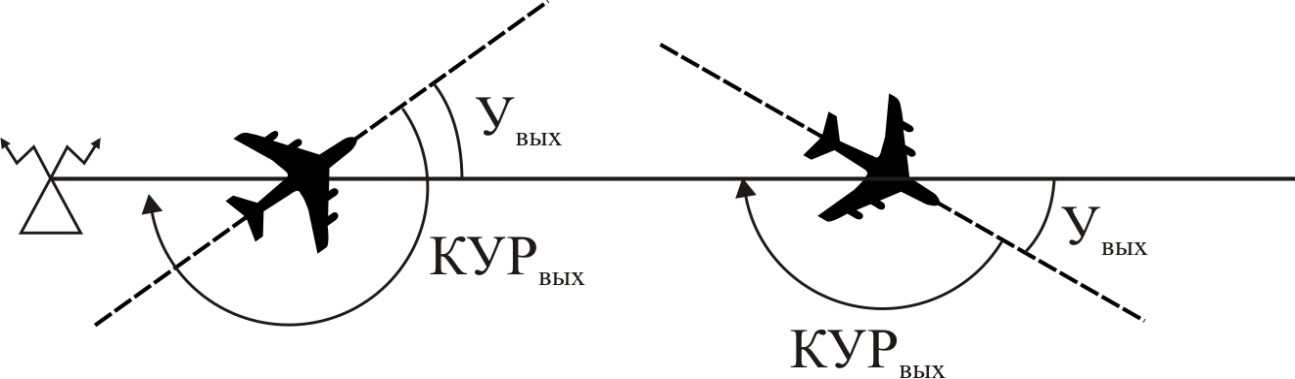
Рис. 3.20 Курсовой угол выхода при полете от РНТ
Таким образом, при полете от РНТ
КУРвых=180±Увых.
И в этом случае выбирать знак в данной формуле целесообразно опираясь на пространственное представление. Достаточно представить: в момент пересечения ЛЗП РНТ находится сзади справа или сзади слева? Тогда, если вы знаете, что такое вообще КУР и в какую сторону он отсчитывается, легко определить КУРвых.
Очевидно, что чем больше Увых, тем быстрее ВС выйдет на ЛЗП. Но при выборе Увых пилот должен учитывать следующее.
1) Самолет не может развернуться мгновенно. Пока ВС еще только разворачивается, чтобы взять курс МКвых, оно уже приближается к ЛЗП. И может оказаться, что при большом Увых сразу после взятия курса МКвых уже пора разворачиваться в противоположную сторону на расчетный курс следования по ЛЗП. Но и этот разворот требует времени и самолет все еще будет приближаться к ЛЗП. Может оказаться, что ВС «проскочит» ЛЗП, окажется от нее с противоположной стороны и снова потребуется исправление пути. Поэтому выбираемая величина Увых должна зависеть от величины ЛБУ. При небольших ЛБУ большой Увых недопустим.
2. При выходе на ЛЗП продольная ось ВС направлена к ней под Увых. Но это не значит, что ЛФП пересекает ЛЗП по таким же углом. Ведь самолет не летит в направлении продольной оси из-за наличия угла сноса. Допустим, ЗМПУ=100 и ВС выходит на ЛЗП с правой стороны с Увых=20. Пилот выдерживает МКвых=100-20=80 (в этом направлении направлена продольная ось). Но если ветер дует вправо и создает УС=+10, то ФМПУ=МК+УС=80+(+10)=90. То есть ФМПУ отличается от ЗМПУ всего на 10º . Самолет выходит на ЛЗП под углом 10º , а не 20º , то есть вдвое медленнее, чем ожидал пилот.
И наоборот, если бы был УС=-10, то фактически ВС приближалось бы к ЛЗП быстрее (под углом 30º).
Таким образом, при выборе Увых пилот должен также учитывать, мешает или помогает ветер выйти на ЛЗП. Ведь если мешает, то ВС может и не успеть выйти на ЛЗП до конца участка. а если при этом УС больше Увых, то ВС вообще не выйдет на ЛЗП, а будет удаляться от нее!