

3.5. Пеленг радиостанции и пеленг самолета
Тот факт, что сам по себе КУР не является навигационным параметром, ограничивает возможности его применения для навигации.
Но с помощью КУР можно определить пеленг радиостанции, который является навигационным параметром и может быть использован для определения местоположения ВС. для определения пеленга необходимо знать курс ВС. Часто используется магнитный курс, измеренный магнитным компасом (курсовой системой).
Курс отсчитывается от меридиана до продольной оси ВС, а КУР – от продольной оси до направления на радиостанции. Очевидно, что сумма этих двух углов дает пеленг радиостанции – угол, заключенный между северным направлением меридиана, проходящего через ВС, и направлением на радиостанцию (рис.3.15).
Если, оставаясь в той же точке, ВС изменит курс (например, уменьшит его), то на столько же увеличится КУР. А пеленг радиостанции (сумма этих углов) не изменится. Из рис. 3.15, на котором в качестве начала отсчета выбран магнитный меридиан, можно записать
МПР= МК + КУР. (3.1)
Пеленг может быть магнитным (МПР), истинным (ИПР), ортодромическим (ОПР) в зависимости от направления, принятого за начало отсчета.
Очевидно, что аналогичные соотношения можно записать и для пеленгов, отсчитанных от других направлений начала отсчета (истинного или опорного меридианов):
ИПР=ИК +КУР,
ОПР = ОК +КУР.
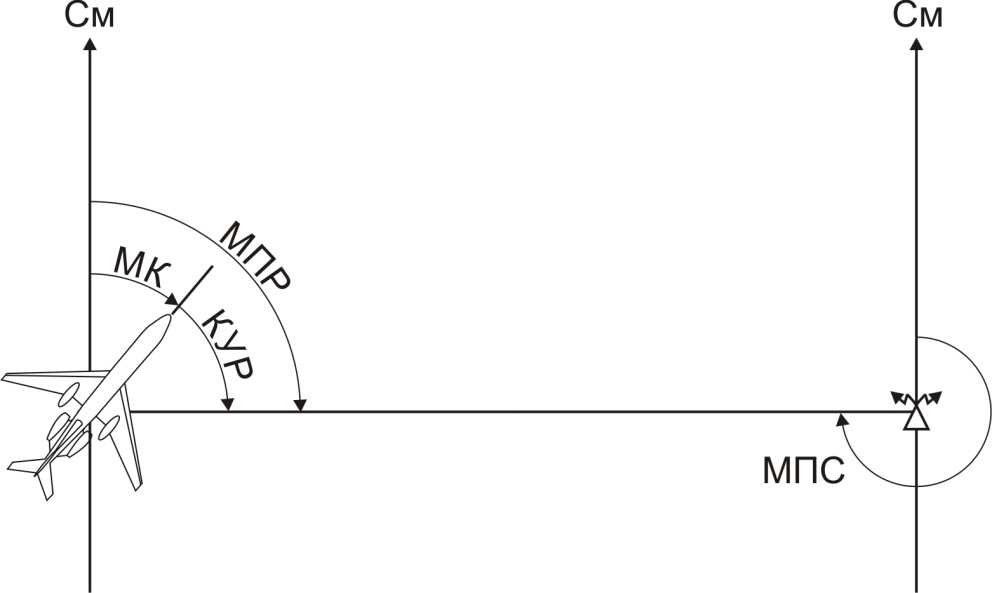
Рис. 3.15. Определение пеленга радиостанции
Если считать, что меридианы самолета и радиостанции параллельны, то нетрудно рассчитать и пеленг самолета, например МПС. Ведь пеленг радиостанции – это направление «туда», а пеленг самолета – это направление «обратно». И если они отсчитываются от одинакового направления отсчета, то различаются ровно на 180º:
МПС = МПР ±180 = МК + КУР ± 180. (3.2)
Во многих случаях считать параллельными меридианы самолета и радиостанции вполне допустимо, учитывая невысокую точность измерения КУР и, следовательно, точность определения МПР и МПС. Но на самом деле даже истинные меридианы самолета и радиостанции не параллельны. Ортодромия, проходящая от самолета к радиостанции, пересекает меридианы под разными углами, разность между которыми представляет собой угол схождения меридианов. Если же говорить о магнитных меридианах, то кроме того, их направления могут различаться из-за различия магнитных склонений в двух этих точках.
Точный расчет пеленга самолета будет рассмотрен позже. А пока будем считать, что магнитные меридианы радиостанции и самолета параллельны. Такое допущение во многих случаях допустимо, поскольку расстояние между радиостанцией и самолетом невелико, в средних широтах угол схождения меридианов невелик и магнитное склонение различается незначительно.
3.6. Контроль пути по направлению с помощью арк
Условие контроля пути по направлению. Как уже отмечалось ранее, под контролем пути по направлению понимается определение стороны и величины уклонения ВС от ЛЗП. При использовании угломерных РНС контроль пути по направлению проводить наиболее удобно в случае, когда наземное РТС (радиостанция) располагается на ЛЗП или ее продолжении. В этом случае определить в какую сторону и насколько уклонилось ВС от ЛЗП можно без трудоемких расчетов и графической работы на карте.
Общая идея этого способа заключается в том, что необходимо сравнить фактическое значение пеленга с тем значением пеленга, при котором ВС находилось бы на ЛЗП. Это относится к любому угломерному наземному средству, не обязательно к приводной радиостанции.
Существует общий термин «радионавигационная точка» (РНТ), которым можно обозначать любое наземное радионавигационное средство: ОПРС, угломерный или дальномерный радиомаяк и т.п. В данной главе, посвященной радиокомпасной системе, под РНТ будем понимать приводную радиостанцию.
Контроль пути по направлению при полете от РНТ. Если РНТ располагается в начальном ППМ участка маршрута и ВС находится на ЛЗП, то очевидно, что пеленг самолета Пс от РНТ совпадает с направлением ЛЗП, то есть с заданным путевым углом βз (рис. 3.16). От какого именно меридиана отсчитываются Пс и βз (магнитного, истинного, опорного) – не принципиально, лишь бы от одного и того же. Для конкретности будем чаще рассматривать магнитные пеленги и путевые углы, поскольку на картах указываются именно магнитные заданные путевые углы, отсчитанные от меридиана начального ППМ участка маршрута.
Если при полете от РНТ ВС уклонилось вправо от ЛЗП, то Пс будет больше βз , а если влево – меньше βз (см. рис. 3.16). Это справедливо для любого направления полета (на запад, юго-восток и т.п.). Нужно только помнить, что понятия «больше» и «меньше» используются здесь не чисто в арифметическом смысле слова, хотя в большинстве случаев ему соответствуют.
Из двух направлений считается больше то направление, которое направлено «правее», то есть более по часовой стрелке (ведь все углы в навигации отсчитываются именно в этом направлении). Более корректно эту мысль можно выразить следующим образом. Направление В считается большим, чем направление А, если направление А нужно поворачивать для совпадения с В по часовой стрелке. Разумеется, речь идет о повороте в ту сторону, куда ближе, короче (нехорошо поворачиваться направо через левое плечо).
Например, считается 120>37, 195>20, 343>260 и т.д. (Здесь и далее единицы измерения угловых величин – градусы- опущены). Представьте себе эти направления в виде рисунка.
Но, в противоречии с обычной арифметикой, 5>350, 80>290 и т.д. Здесь цифры не совпадают с приведенным правилом. Это происходит потому, что начало отсчета (северное направление меридиана) находится между двумя рассматриваемыми направлениями. Например, чтобы по кратчайшему пути перейти от направления 350 к направлению 5 нужно повернуться на 15 вправо (по часовой стрелке), поэтому 5 больше, чем 350.
Далее используемые нами применительно к направлениям понятия «больше» и «меньше» следует понимать везде именно в этом смысле.
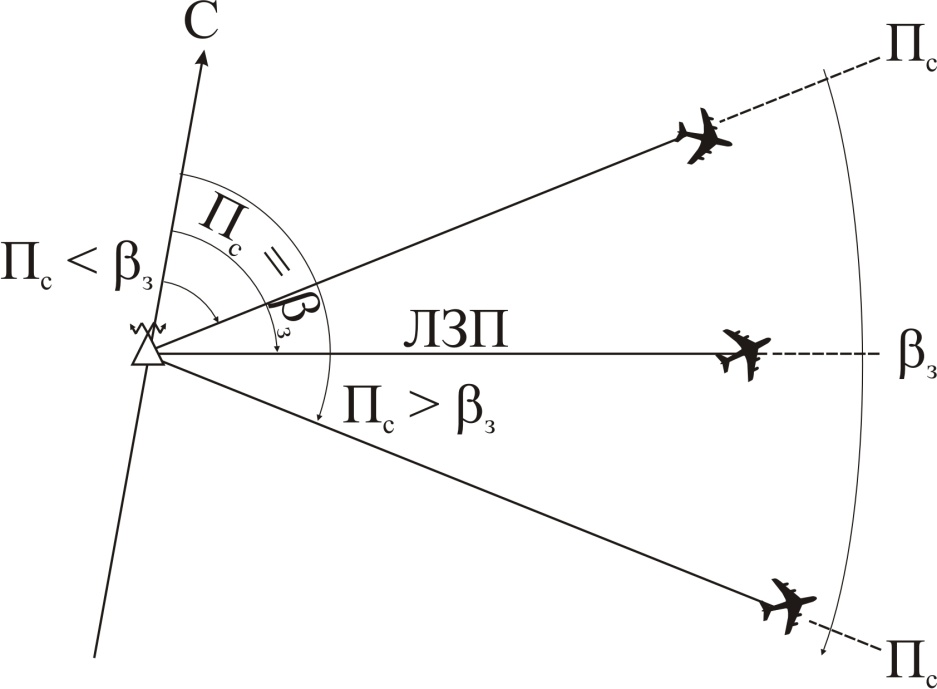
Рис. 3.16. Контроль пути по направлению при полете от РНТ
Таким образом, несовпадение МПС и ЗМПУ свидетельствует об уклонении от ЛЗП. Очевидно, что разность этих величин представляет собой боковое уклонение БУ. Если ВС уклонилось вправо, то оно имеет знак плюс, а если влево – минус.
Пример. ЗМПУ= 4, МПС=358.
Поскольку МПС<ЗМПУ и различаются эти величины на 6, то БУ= - 6.
Если хотя бы примерно известно расстояние до РНТ (в данном случае оно будет соответствовать пройденному расстоянию Sпр), то можно найти и линейное боковое уклонение ЛБУ, как это было рассмотрено в главе 1.
Контроль пути по направлению при полете на РНТ. Если РНТ располагается в конечном ППМ участка маршрута и ВС находится точно на ЛЗП, то направление ЛЗП βз (например, ЗМПУ, если отсчитывать его от магнитного меридиана) и направление на ВС от РНТ Пс (МПС) будут строго противоположными, то есть различаться на 180º. Ведь ЗМПУ совпадает с направлением на РНТ от самолета, а МПС – это направление от РНТ на самолет.
В этом случае, то есть при полете на радиостанцию, удобнее использовать не пеленг самолета Пс , а пеленг радиостанции Пр , который как раз и отличается от Пс на 180º (напомним, что пока мы считаем меридианы РНТ и МС параллельными).
Следовательно, при нахождении на ЛЗП Пр= βз. Нетрудно убедиться (рис. 3.17), что при уклонении вправо Пр< βз , а при уклонении влево Пр> βз. Разность этих величин (на сколько они не совпадают) является в данном случае дополнительной поправкой ДП, которая, конечно, при уклонении вправо имеет знак плюс, а при уклонении влево – минус.
Если известно расстояние до РНТ (в данном случае оно будет являться оставшимся расстоянием Sост), то можно найти и ЛБУ.
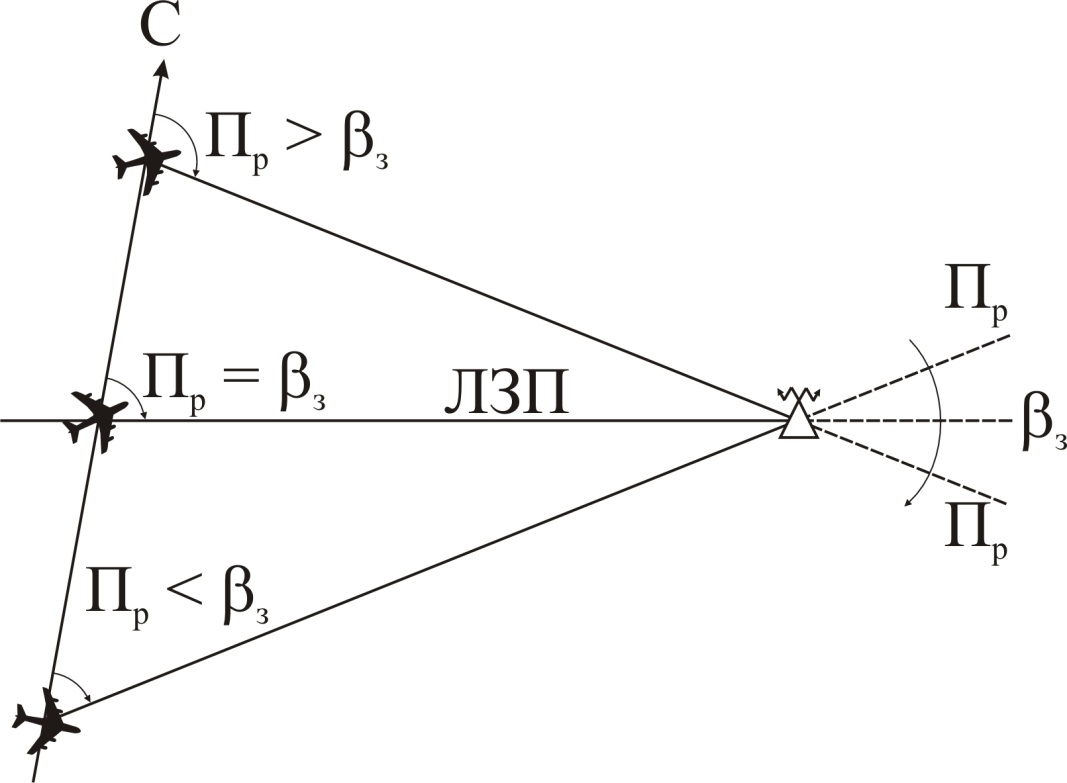
Рис. 3.17. Контроль пути по направлению при полете на РНТ
Рекомендации по определению стороны уклонения. Таким образом, при нахождении радиостанции угломерной системы на ЛЗП легко определять сторону и величину уклонения. Для этого нужно сравнить пеленг радиостанции (при полете на нее) или пеленг самолета (при полете от РНТ) с заданным путевым углом.
Дело осложняется только одним моментом:
при полете от РНТ, если МПС больше ЗМПУ, то уклонение вправо,
а при полете на РНТ, если МПР больше ЗМПУ, то уклонение влево.
То есть, все наоборот. Поэтому, если запомнить это правило чисто формально, то рано или поздно будет допущена ошибка в его применении. Гораздо надежнее представлять себе образно два сравниваемых направления (пеленг и путевой угол), например, в виде картинок, аналогичных рис. 3.16 и рис. 3.17.
Курс и КУР измеряются разными приборами и их значения могут отображаться на разных индикаторах. В этом случае пилоту приходится самому рассчитывать МПР или МПС. Для этого он должен отсчитать магнитный курс (с указателя компаса или курсовой системы) и курсовой угол радиостанции (с указателя радиокомпаса). Расчет, естественно, выполняется по формулам (3.1) и (3.2), которые справедливы при любом расположении РНТ и ВС, в том числе, когда ВС пролетает мимо радиостанции.
Но при полете на или от РНТ значение КУР близко к 0 или соответственно к 180º . Это позволяет несколько упростить порядок расчета, чтобы не оперировать в памяти со слишком большими числами.
Например, при полете на РНТ измерены МК=244, КУР=357. Поскольку полет выполняется на РНТ, необходимо рассчитать МПР. Для удобства расчета КУР целесообразно выразить в виде отрицательной величины: КУР=357=-3.
После этого легко рассчитать
МПР=МК+КУР=244 +(-3)=241.
Если же выполняется полет от РНТ и измерены МК=312, КУР=187, то нужно рассчитать МПС:
МПС=МК+КУР±180.
Для удобства расчета эту же формулу удобно представить в виде
МПС=МК+(КУР-180)
и расчет начинать с конца, с круглой скобки. Ведь если КУР близок к 180, то значение в круглой скобке будет маленьким по абсолютной величине и его легко прибавить к МК. Нужно лишь помнить, что оно может оказаться как с плюсом, так и с минусом.
В нашем примере
(КУР-180)=(187-180)=+7.
Тогда МПС=312 +(+7)=319.
При отсчете показаний с прибора эту величину в скобках можно непосредственно снять с индикатора (иногда ее называют «альфа»). Надо просто посмотреть, на сколько градусов показания тупого конца стрелки АРК больше или меньше 180.