

3.4. Применение арк для полета по линии заданного пути
Способы полета на или от радиостанции. Как показано ранее, КУР не является навигационным параметром, поскольку в одной и той же точке пространства может иметь любое значение в зависимости от направления продольной оси ВС. Поэтому с помощью одного только КУР нельзя определить МС. Но можно решать некоторые другие навигационные задачи, например, выполнить полет по ЛЗП. Для этого радиостанция должна находиться на ЛЗП, например, в начальном или конечном ППМ участка маршрута. Но она также может находиться на продолжении ЛЗП, то есть за пределами участка.
Во внеаэродромном воздушном пространстве (на воздушных трассах) ОПРС как раз и располагают в ППМ, чтобы облегчить экипажу выдерживание ЛЗП. Традиционно рассматривают три «классических» способа полета по ЛЗП с помощью радиокомпаса: пассивный, курсовой и активный способы.
Пассивный полет на радиостанцию. Такой способ полета является самым простым и по сути не требует наличия на борту никакого навигационного оборудования, кроме АРК. Способ пассивного полета на радиостанцию заключается в непрерывном выдерживании КУР равным нулю (КУР=0). Это означает, что продольная ось ВС на протяжении всего полета направлена на радиостанцию.
На первый взгляд кажется очевидным, что если ВС в начальный момент находилось на ЛЗП, то в этом случае оно и будет лететь по ЛЗП прямо на радиостанцию. Так и было бы, но только при абсолютно точном измерении и выдерживании КУР и, самое главное, при отсутствии ветра. Ведь при наличии ветра ВС не летит в том направлении, куда направлена его продольная ось. Имеется угол сноса.
Пусть в начальный момент времени ВС находится точно на ЛЗП, проходящей через радиостанцию, на расстоянии S0 от нее, а продольная ось ВС направлена точно на радиостанцию (КУР=0), рис. 3.14.
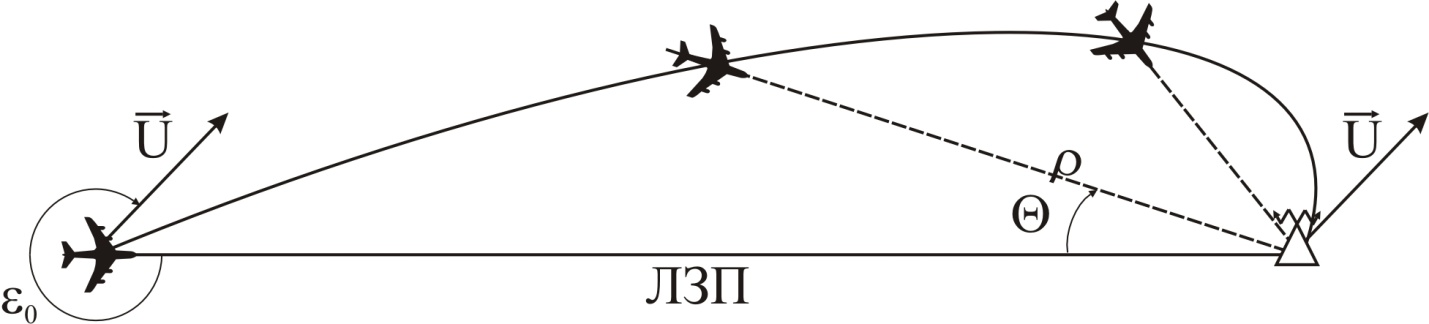
Рис. 3.14. Пассивный полет на радиостанцию
Пусть ветер дует под углом ε0 к ЛЗП. Как только начнется полет, ветер снесет ВС с ЛЗП и будет относить его все дальше и дальше. Направление на радиостанцию будет изменяться, но пилот выдерживает КУР=0, меняя курс и непрерывно направляя продольную ось ВС на радиостанцию. В результате ВС полетит по сложной кривой, называемой радиодромией. Уравнение радиодромии в полярной системе координат, начало которой находится в точке расположения радиостанции, имеет вид:

где ρ- текущее удаление ВС от радиостанции,
θ- угол между направлением ЛЗП и направлением на ВС.
ε0 – начальный угол ветра (между ЛЗП и вектором ветра),
S0 – начальное расстояние от ВС до радиостанции.
n – величина, показывающая во сколько раз истинная воздушная скорость ВС V больше скорости ветра U:

Анализируя уравнение радиодромии, можно сделать несколько полезных для практики выводов.
1) Радиодромия является кривой линией, причем, переменной кривизны. Чтобы выполнить по ней полет, ВС все время должно находится в развороте и, следовательно, выполнять полет с креном. Если в начале полета кривизна кривой и крен невелики, то по мере приближения к радиостанции, пилоту необходимо все больше увеличивать крен, чтобы удерживать «убегающую» стрелку АРК на нуле.
2) Теоретически, строго выполняя полет по радиодромии, ВС в конце концов выйдет на радиостанцию, причем с направления, противоположного направлению ветра. То есть, если, например, ветер дует перпендикулярно ЛЗП, то и ВС выйдет на радиостанцию поперек ЛЗП. На практике же ВС вряд ли сможет выйти точно на радиостанцию, поскольку вблизи нее кривизна радиодромии будет столь велика, что потребует выдерживания слишком большого крена. А ведь у всех гражданских ВС существует максимальный крен, который нельзя превышать (обычно 30º). После его достижения пилот уже не сможет удерживать КУР=0 и ВС «проскочит» мимо радиостанции.
3) За исключением случаев строго попутного или встречного ветра ВС будет уклоняться от ЛЗП и даже может выйти за пределы ширины воздушной трассы. Максимальное уклонение z, которое возможно при данных U и V, можно рассчитать по формуле приближенной формуле

Интересно, что такое максимальное уклонение будет иметь место не при строго боковом ветре (ε=90º), а в зависимости от величины n при ε=90º …105 º (чем больше n, тем ближе к 90º).
Например, при V=500 км/ч, U=100 км/ч (n=5) и S0=150 максимальное уклонение будет иметь место при угле ветра примерно 102º и составит z=11 км, то есть ВС окажется далеко за пределами трассы.
4) По сравнению с полетом по кратчайшему расстоянию радиодромия имеет большую протяженность, полет по ней требует несколько большего времени, что влечет перерасход топлива. Правда, увеличение длины ЛФП не является столь уж значительным (не более 5-7%).
По изложенным причинам пассивный полет на радиостанцию хотя и является простым по своей идее, но в большинстве случаев малоприемлем в гражданской авиации, поскольку приводит к уклонению от ЛЗП и выходу на радиостанцию не в том направлении, в котором нужно продолжать полет. Однако его в принципе можно применять, когда ветер близок к попутному или встречному.
Разумеется, пассивный полет можно применять в экстренных ситуациях, когда точность навигации не играет большой роли. Например, для выхода на аэродром при потере ориентировки или в сложных метеоусловиях.
Курсовой способ полета на радиостанцию. Недостатком рассмотренного ранее пассивного полета являлось то, что на протяжении всего полета ВС находится в развороте со все увеличивающейся угловой скоростью. Пилоту приходится непрерывно менять курс, чтобы выдерживать КУР=0.
Курсовой способ является более удобной для пилота модификацией пассивного способа. Он заключается в том, что ВС удерживается на КУР=0 не непрерывно, как в пассивном способе, а устанавливается на этот КУР периодически, время от времени. Довернув ВС на КУР=0, пилот запоминает и выдерживает по компасу получившийся при этом курс. По мере полета с постоянным курсом КУР постепенно уходит от нулевого значения и через некоторое время (обычно через каждые 3-5 минут полета) пилот вновь доворачивает ВС на КУР=0.
На каждом участке полета между доворотами ВС летит с постоянным курсом, то есть прямолинейно, поэтому ЛФП имеет вид ломаной линии. Нетрудно сообразить, что она будет лежать дальше от ЛЗП, чем радиодромия, то есть уклонение будет еще больше. Сохраняются и другие недостатки пассивного способа. Такой способ просто более удобен для пилота, поскольку выдерживать постоянным курс, а не КУР, гораздо легче. Можно даже использовать автопилот.
Активный полет на и от радиостанции. Заключается в выдерживании курсового угла радиостанции с учетом угла сноса.
Чтобы ВС не сносило ветром с ЛЗП, продольную ось нужно отвернуть от ЛЗП в ту сторону, откуда дует ветер, на величину угла сноса.
Если выполняется полет на радиостанцию, а снос положительный (сносит вправо), то продольную ось нужно отвернуть влево, то есть уменьшить курс. Из рис. 3.15 можно видеть, что при этом КУР будет численно равен УС. Если сносит влево (УС отрицательный), то курс нужно увеличить по сравнению с направлением на радиостанцию (отвернуть продольную ось вправо). При этом КУР уменьшится по сравнению с первоначальным нулевым значение. Но КУР не может быть отрицательным, его отсчитывают в диапазоне от 0 до 360º. Поэтому КУР=360+УС. Например, если УС=-5, то необходимо выдерживать КУР=360+ (-5)=355.
При полете на радиостанцию формулой
КУР=360+УС
можно пользоваться как при положительном, так и при отрицательном сносе. При положительном сносе УС=+5 получим КУР=360+5=5.
При полете от радиостанции используют формулу
КУР=180+УС.
Например. при УС=+5 получим КУР=185, а при УС==-5 получим КУР=180+(-5)=175.
Таким образом, активный полет заключается в выдерживании постоянного КУР:
при полете на радиостанцию КУР=360+УС;
при полете от радиостанции КУР=180+УС.
Для использования данного способа не нужно даже знать курс, но, разумеется, необходимо знать УС.