

3.3. Курсовой угол радиостанции
АРК предназначен для измерения курсового угла радиостанции.
Курсовой угол радиостанции (КУР, ψ) – это угол, заключенный между направлением продольной оси ВС и направлением на радиостанцию. Отсчитывается от продольной оси ВС по часовой стрелке (вправо) от 0º до 360º (рис. 3.10).
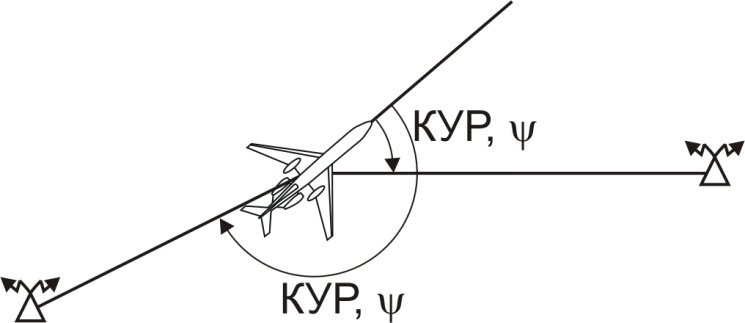
Рис. 3.10. Курсовой угол радиостанции
Следует подчеркнуть, что КУР отсчитывается не от меридиана, а от продольной оси ВС, что показывает слово «курсовой» (ведь курс – это направление продольной оси ВС). Поэтому по величине КУР невозможно сказать, где находится радиостанция: к северу, к югу, западу, востоку от ВС. Можно только судить о том, находится ли она впереди, сзади, справа или слева от направления продольной оси ВС. А сама эта ось может быть направлена в любую сторону.
При одном и том же значении КУР ВС может находиться с любой стороны от радиостанции (рис. 3.11 ).
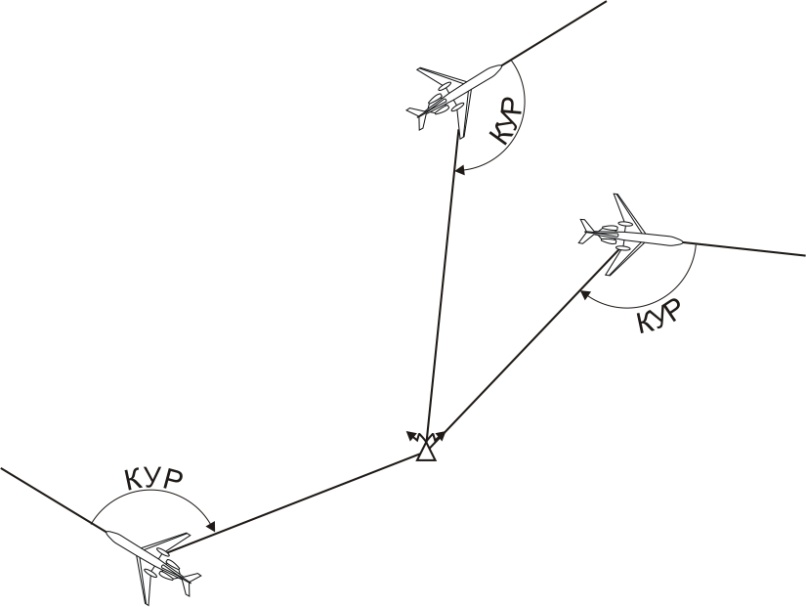
Рис. 3.11. Одинаковый КУР при различном положении ВС
Очевидно, что при КУР=0 радиостанция находится впереди, нос ВС «смотрит» на нее (это не значит, что ВС летит прямо на радиостанцию, ведь есть еще угол сноса). При КУР=180 радиостанция находится сзади, в направлении хвоста ВС. Если радиостанция находится строго справа, то КУР=90, а если слева КУР=270 (рис. 3.12). Пилот должен легко интерпретировать любое значение КУР, отсчитанное с указателя, представляя, где находится радиостанция.
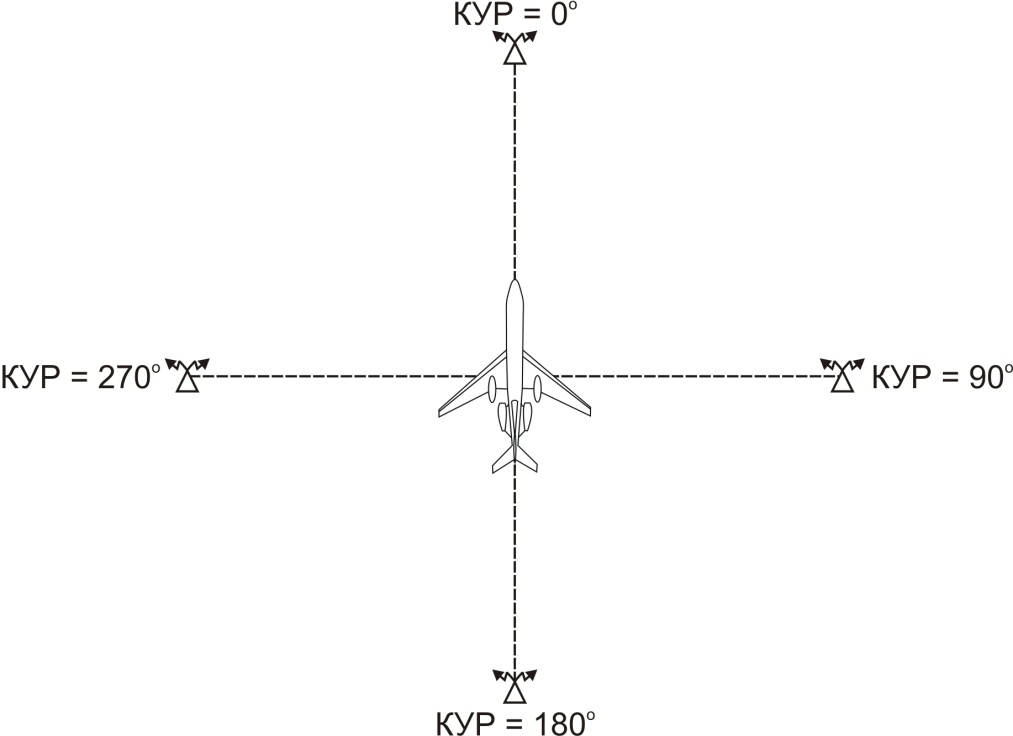
Рис. 3.12. Некоторые значения КУР
Если ВС пролетает мимо радиостанции, находящейся справа, то КУР этой радиостанции увеличивается, приближаясь к 180º .Если же радиостанция находится слева, то в полете ее КУР уменьшается, также стремясь к 180º.
Если ВС поворачивает вправо, то КУР уменьшается, а если влево увеличивается независимо от того, с какой стороны находится радиостанция. При этом на сколько градусов увеличился курс, на столько же уменьшился КУР, и наоборот. Это одно из полезных правил аэронавигации: курс больше, КУР меньше.
У любого радиокомпаса имеются погрешности. Точно также как обычный магнитный компас показывает компасный курс, отличающийся от магнитного на величину девиации, так и радиокомпас на указателе показывает неточное значение КУР, называемое отсчетом радиокомпаса (ОРК). Разность КУР и ОРК называется радиодевиацией ∆Р. Радиодевиация вызвана переотражением радиоволн от металлической конструкции ВС, в результате чего рамка радиокомпаса реагирует на результирующую напряженность электромагнитных волн – идущих от радиостанции и отраженных от фюзеляжа (рис. 3.13). Величина ∆Р зависит от величины КУР, то есть от направления прихода радиоволн.
Многие АРК в своей конструкции имеют специальное устройство, компенсирующее радиодевиацию. Аналогично тому как это делается с магнитным компасом, радиодевиацию на ВС периодически списывают (заносят в таблицу), полностью или частично компенсируют, а оставшуюся – заносят в график радиодевиации, размещаемый в кабине. Радиодевиация является систематической погрешностью радиокомпаса, поскольку она для данного экземпляра АРК является постоянной (но разной для каждого значения КУР).
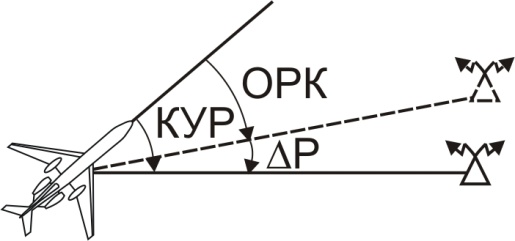
Рис. 3.13. Радиодевиация
Пилот, отсчитав по указателю АРК значение ОРК, определяет по графику соответствующую ему ∆Р, и рассчитывает КУР:
КУР=ОРК+∆Р.
На практике значения ∆Р величиной в 1-2º обычно не учитывают, поскольку случайная погрешность АРК все равно значительно больше.
Случайная погрешность измерения КУР характеризуется величиной СКП σψ=1,5º-3º. Это означает, что радиокомпасная система является не очень точной. Однако ее неточность компенсируется простотой и относительной надежностью системы.
В некоторых случаях АРК подвержен дополнительным, порой довольно значительным, погрешностям. Пилот не может знать их величину и, тем более, компенсировать данные погрешности, но он должен знать о их возможном наличии, чтобы учитывать это при решении навигационных задач.
«Горный эффект» возникает при полетах над рельефом в горной местности на относительно небольшой высоте (до 1500-2000 м над рельефом), особенно, если полет выполняется между радиостанцией и близко расположенным (до 10-15 км) горным хребтом. Он возникает из-за того, что электромагнитная волна огибает горные хребты и частично от них отражается. При этом искажается фронт волны, что приводит к погрешности измерения КУР до 8-10º.
«Береговой эффект» возникает при переходе электромагнитной волны с суши на мор, когда радиостанция находится на суше, а ВС над морем. Если направление на радиостанцию составляет с береговой линией угол менее 20º, а расстояние до нее невелико, радиоволна преломляется, что может вызвать погрешность КУР до 5-7º .
«Ночной эффект» (поляризационная ошибка) возникает чаще не ночью, а в сумерках, если удаление до радиостанции более 100-150 км. Его причиной является отражение волны от ионизированных слоев атмосферы. Погрешность измерения КУР в этом случае в среднем составляет 8-10º, но может достигать 20-30º, а в отдельных случаях и 60-80º. Очевидно, что в этом случае использовать АРК просто невозможно. Для уменьшения влияния ночного эффекта следует выбирать близкорасположенные более мощные радиостанции с возможно большей длиной волны.
Кроме перечисленных эффектов погрешность измерения КУР может быть вызвана электростатическими помехами при полете в условиях высокой электризации атмосферы, что часто бывает вблизи зон грозовой деятельности. В этом случае могут возникнуть значительные колебания стрелки АРК, что затрудняет отсчет показаний.