

Глава №6: Синхронные микродвигатели
Вопрос №1: Назовите основные конструктивные исполнения СДПМ. Какими достоинствами и недостатками обладает каждая из конструкций?
В схемах автоматики применяются синхронные двигатели различных типов с постоянными магнитами (СДПМ), различающиеся способом пуска, конструктивным исполнением, способом питания обмоток статора и т.п. Наиболее перспективными в электроприводах с относительно высокими частотами вращения являются СДПМ с асинхронным пуском. Отличительная особенность конструкции таких двигателей — наличие на роторе пусковой коротко замкнутой обмотки.
В зависимости от взаимного расположения на роторе магнитов и коротко замкнутой обмотки СДПМ подразделяют на двигатели с радиальным, аксиальным и тангенциальным расположением системы возбуждения и пускового устройства. Конструкция статоров СДПМ всех типов такая же, как и у обычных машин переменного тока.
1) Синхронные двигатели с радиальным расположением постоянных магнитов 1 и короткозамкнутой обмотки 2 отличаются от двигателей с электромагнитным возбуждением тем, что полюсная система ротора выполняется с малым зазором между соседними полюсными башмаками 3 (рис.1,а). Значительная ширина полюсных башмаков приводит к увеличению магнитной проводимости рассеяния между полюсами ротора, что предохраняет магниты от размагничивания МДС реакции якоря и способствует увеличению магнитной связи обмоток статора и ротора в пусковом режиме. Обмотка ротора выполняется практически с полным числом медных стержней и образует мощную демпферную клетку, которая защищает магниты от размагничивания ударным током короткого замыкания в момент подключения двигателя к сети.
В СДПМ малой мощности при высоких частотах вращения применяется конструкция ротора, представленная на рис.1,б. Наличие стальных перемычек (мостиков насыщения) в междуполюсной зоне роторного кольца улучшает пусковые свойства СДПМ и обеспечивает получение монолитной, механически прочной и технологичной конструкции.
В магнитных системах со звездообразными магнитами не удается полностью использовать магнитные свойства анизотропных материалов. Поэтому при применении высококоэрцитивных сплавов со столбчатой структурой магниты выполняют из отдельных брусков, прилегающих к ромбовидному валу (рис.1,в).

Рис. 1. Конструкции роторов с радиальным расположением постоянных магнитов и пускового устройства: а — со звездообразным магнитом; б — с мостиком насыщения; в — с ромбовидным магнитным валом
2) Конструкция ротора с аксиальным расположением постоянных магнитов 1 и короткозамкнутой обмотки 2, представленная на рис.2,а, применяется при часто встречающихся на практике ограничениях по внешнему диаметру двигателя, когда выполнение лучшей в электромагнитном отношении радиальной конструкции затруднительно. Для обеспечения надежного пуска магниты при аксиальной конструкции занимают 0,2—0,3 длины сердечника статора.
Отметим, что в силу малой магнитной проницаемости магнитов поток статора сосредоточен в основном в зоне короткозамкнутого ротора. Поэтому индуктивные сопротивления реакции якоря по различным радиальным осям различаются незначительно. Это обстоятельство позволяет рассматривать СДПМ аксиальной конструкции как неявнополюсный. Недостатком конструкции ротора с одним расположенным с торца магнитом является возможность возникновения осевых сил тяжения в случае различной индукции в зоне магнита и пускового устройства. Поэтому в СДПМ с высокой равномерностью частоты вращения ротор выполняют по конструктивным схемам, показанным на рис.2,б,в. В конструкции ротора, показанной на рис.2,в, целесообразно выполнять одну обмотку с большим активным сопротивлением, исходя из обеспечения требуемого пускового момента, другую — с малым сопротивлением в целях получения большой крутизны пусковой характеристики в зоне малых скольжений.
Достоинством аксиальной конструкции роторов является ее технологичность. Короткозамкнутая обмотка может выполняться как медной из отдельных стержней, так и алюминиевой путем литья под давлением. Отдельное расположение на валу СДПМ короткозамкнутой части ротора позволяет легко осуществить скос пазов и уменьшить влияние зубцовых гармоник.

Рис.2. Конструкции роторов с аксиальным расположением постоянных магнитов и пускового устройства: а — с одним торцевым магнитом; б — с двумя торцевыми магнитами; в — с двумя пусковыми клетками
3) Двигатели с тангенциальным расположением на роторе постоянных магнитов 1 и пускового устройства 2 (рис.3,а), называемые иногда двигателями с ротором коллекторного типа, применяются в многополюсных системах в целях концентрации магнитного потока соседних магнитов 1 в полюсах-сегментах 3. Клиновидные полюсы 3 ротора изготовлены из магнитомягкой стали. Стержни пускового устройства 2 вместе с короткозамыкающими кольцами обеспечивают монолитность и механическую прочность ротора. Для уменьшения потока рассеяния магниты отделены от вала немагнитной втулкой 4.
В роторе коллекторного типа магнитный поток, создаваемый соседними магнитами, концентрируется в полюсах-сегментах. Недостатками роторов коллекторного типа являются: сложность конструкции, малая доля магнитов в объеме ротора, наличие паразитных воздушных зазоров между магнитами и сегментами полюсов.
Разновидностью ротора коллекторного типа является конструкция, показанная на рис.3,б. Здесь для увеличения рабочего потока кроме тангенциально-намагниченных магнитов 1 установлены магниты 2, намагниченные в радиальном направлении. Общим недостатком представленных на рис.3 конструкций является усложнение технологии сборки роторов.

Рис. 3. Конструкции роторов коллекторного типа (а) и с тангенциально-радиальными намагниченными магнитами (б)
Вопрос №2: Каково соотношение в СДПМ между индуктивными сопротивлениями обмотки якоря по продольной и поперечной осям?
Главное индуктивное сопротивление якоря по продольной оси
![]()
Главное индуктивное сопротивление якоря по поперечной оси
![]()
Полные индуктивные сопротивления якоря определяются известными соотношениями:
![]() ;
;
![]()
где![]() — индуктивное сопротивление рассеяния
обмотки якоря.
— индуктивное сопротивление рассеяния
обмотки якоря.
Вопрос №3: Изобразите угловую характ-тику идеального явнополюсного СДПМ.

При малой степени
возбужденности СДПМ и значительной
разности индуктивных сопротивлений
реакции якоря по осям d, q реактивный
момент становится соизмеримым с основным
моментом. В этом случае в зоне отрицательных
значений угла нагрузки появляется зона
двигательного режима и при небольшой
нагрузке двигатель может устойчиво
работать на участке А—В угловой
характеристики. Точки А, С характеризуют
такие режимы, когда составляющие
электромагнитного момента
![]() и Mdq
уравновешивают друг друга.
и Mdq
уравновешивают друг друга.
Вопрос №4: В каких режимах происходит стабилизация магнитов в СДПМ различной конструкции?
В СДПМ с ротором радиальной и тангенциальной конструкции стабилизация магнитов происходит в так называемом режиме противовключения, когда МДС полюсов ротора и МДС реакции якоря направлены навстречу друг другу. Такой режим наступает во время асинхронного пуска СДПМ при малых скольжениях ротора, когда демпфирующее влияние токов короткозамкнутой обмотки ничтожно мало и действие МДС якоря проявляется в полной мере. В СДПМ с ротором аксиальной конструкции наибольшее размагничивание магнита происходит в момент подключения СДПМ к сети в результате действия МДС, соответствующей максимальному значению пускового тока. Для СДПМ с ротором радиальной конструкции этот режим не является опасным благодаря демпфирующему влиянию токов, наводимых в пусковой обмотке, расположенной над магнитом. В СДПМ с ротором аксиальной конструкции магнит, имеющий слабые собственные контуры демпфирующих вихревых токов, практически не защищен от воздействия МДС обмотки якоря. Поэтому стабилизация магнита здесь наблюдается при встречном направлении МДС полюсов ротора и МДС якоря, созданной ударным током короткого замыкания.
Вопрос №5. Объясните образование тормозного момента при пуске СДПМ.
В отличие от пуска синхронных двигателей с электромагнитным возбуждением пуск СДПМ происходит при «постоянно включенном возбуждении». Это обстоятельство приводит к тому, что поток магнита наводит в обмотке якоря ЭДС ЕЕ, изменяющуюся с частотой fE= (1- s)f1. Под действием этой ЭДС в цепи обмотка статора — источник питания протекает ток IЕ, изменяющийся с частотой, отличной от частоты сети. Таким образом, пусковой режим СДПМ может быть представлен в виде суммы двух режимов; асинхронного режима невозбужденной синхронной машины, питающейся от сети с напряжением U, и генераторного режима возбужденной синхронной машины, включенной в сеть, напряжение которой равно нулю.
Первый режим является двигательным режимом работы асинхронной машины с несимметричным в магнитном и электрическом отношении ротором. Второй режим в предположении, что сопротивление питающей сети равно нулю, является режимом короткого замыкания синхронного генератора при переменной скорости ротора, т.е. тормозным режимом.
В результате взаимодействия поля возбуждения с наведенными им токами якоря IЕ образуется генераторный (тормозной) момент, выражение которого определяется из баланса мощностей.
Вопрос №6: Каковы конструктивные особенности СРД?
Наиболее широкое распространение получили СРД с асинхронным пуском. Статоры в таких СРД аналогичны статорам асинхронных машин, различаются лишь конструкции роторов. До недавнего времени в основном применялась конструкция простого явнополюсного ротора (рис. 6.13, а). Явно выраженные полюсы в таком роторе образуются путем вырубки больших пазов в межполюсном пространстве. Пусковая короткозамкнутая обмотка выполняется в виде беличьей клетки путем заливки всех пазов алюминием.
Улучшение рабочих и пусковых свойств СРД связано с совершенствованием конструкции ротора. В настоящее время известны конструкции усовершенствованных СРД с сегментным ротором (рис. 6.13, б), с ротором, имеющим внутренние немагнитные пазы (рис. 6.13, в), с секционированным ротором (рис. 6.13, г). Из них наиболее широкое распространение получила конструкция ротора с дополнительными внутренними каналами. Такая конструкция позволяет увеличить разность магнитных сопротивлений по осям d и q, не ухудшая пусковых свойств СРД.
Синхронные реактивные двигатели с усовершенствованными роторами приближаются по своим массогабаритным и энергетическим показателям к асинхронным двигателям. Благодаря простоте и технологичности конструкции, надежности и невысокой стоимости СРД находят все более широкое применение на практике. Однако в силу присущих им недостатков область их использования ограничивается электроприводами небольшой мощности с малым моментом инерции нагрузки.

Рис. 6.13. Конструкции роторов СРД:
а — простая; б — сегментная; в — с внутренними пазами; г — секционированная
Вопрос №7: Объясните провал в пусковой механической характеристике СРД при частоте вращения, равной половине синхронной.
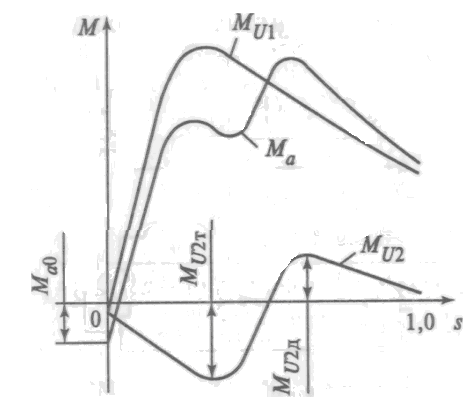
Рис. 6 Механические характеристики СРД в асинхронном режиме.

Из формулы видно, что при s>0,5 момент МU2>0, при s=0,5 МU2=0, при s<0,5 МU2<0. Составляющая момента МU2 искажает механическую характеристику СРД в асинхронном режиме (рис. 6), вызывая провал в кривой момента при скорости ротора, равной половине синхронной. Это явление аналогично одноосному эффекту в асинхронных двигателях с однофазным ротором. Анализ формулы показывает, что при увеличении активного сопротивления якоря максимальные значения момента МU2 смещаются по оси абсцисс относительно точки s=0,5 в разные стороны. Максимум тормозного момента МU2т значительно превышает максимум двигательного момента МU2д.
Вопрос №8: Укажите особенности конструкции СГД.
Статор синхронного гистерезисного двигателя (СГД) выполняют аналогично статору асинхронного двигателя. Сердечник статора набирают из изолированных листов электротехнической стали. В полузакрытых пазах сердечника размещается трехфазная или двухфазная обмотка, создающая при протекании переменного тока вращающееся магнитное поле. Ротор СГД содержит активный слой, изготовленный из магнитотвердого материала. В большинстве СГД гистерезисный слой выполнен в виде сплошного или набранного из колец полого цилиндра 1, расположенного на ферромагнитной или немагнитной втулке 2. В отличие от двигателей с постоянными магнитами, в которых магниты намагничиваются в специальных установках, в СГД намагничивание активного слоя осуществляется магнитным полем статора. Поэтому в СГД для активного слоя ротора применяют материалы с коэрцитивной силой Нс < 40 кА/м.
Если магнитотвердый материал обладает малой магнитной проницаемостью, то для уменьшения намагничивающего тока статора активный слой располагают на магнитомягкой втулке.
Для увеличения синхронизирующего момента ротор СГД иногда выполняют явнополюсным. В конструкции ротора, показанной на рис. в, цилиндрический гистерезисный слой 1 охватывает профилированную немагнитную втулку 2. Различная магнитная проводимость по продольной и поперечной осям ротора обеспечивается магнитомягкими сегментами 3. В гистерезисно-реактивном роторе, представленном на рис. г, активный слой 1 расположен на немагнитной втулке 2. В конструкции ротора, показанной на рис. д, явнополюсность ротора достигается путем вырубки внутренних пазов 2 в пластинах из гистерезисного материала 1. Внутренние пазы могут заполняться алюминиевым сплавом, образующим стержни демпферной обмотки. Выполнение ротора явнополюсным, как правило, приводит к увеличению намагничивающего тока и, следовательно, к снижению коэффициента мощности.
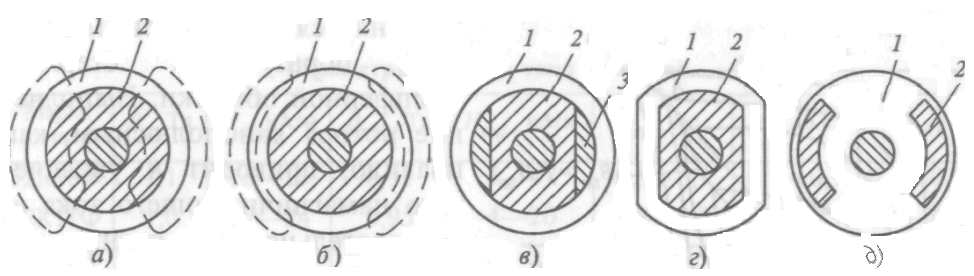
Рис. Роторы гистерезисных двигателей:
а — с магнитной втулкой; б — с немагнитной втулкой; в — с магнитомягкими сегментами;
г — с профилированным активным слоем; д — с внутренними пазами
Вопрос №9: Объясните принцип образования вращающего момента в СГД.

Рис. 7. К образованию вращающего момента СГД:
а — пространственные петли перемагничивания; б — пространственное распределение напряженности магнитного поля; в — пространственное распределение индукции в роторе; г — модель активного слоя
Рассмотрим процесс перемагничивания тонкого активного слоя ротора на магнитомягкой втулке при косинусоидальном распределении в пространстве МДС статора. В первом приближении, пренебрегая МДС воздушного зазора и МДС ферромагнитных участков, принимаем, что вся МДС статора приложена непосредственно к гистерезисному слою.
Предположим, что ротор заторможен (s = 1), а МДС статора неподвижна в пространстве. Тогда после подключения обмотки статора к сети и нарастания Н'r от нуля до Н'rm индукция Bга в элементах ротора 1—9 распределится в соответствии с безгистерезисной кривой первоначального намагничивания I (рис. 7, а) по некосинусоидальному закону (рис. 7, в). Совместим ось поля ротора с амплитудой основной пространственной гармоники индукции Вrm. Элементы ротора с индукцией Вrm представлены на
рис. 7, г в виде
элементарных магнитов. Последние при
![]() =0
ориентированы по оси внешнего поля и
создают радиальные силы тяжения, не
образующие вращающего момента. При
повороте МДС статора на угол
=0
ориентированы по оси внешнего поля и
создают радиальные силы тяжения, не
образующие вращающего момента. При
повороте МДС статора на угол
![]() у одной части элементов ротора (1; 7—9)
наблюдается убывание напряженности
Н"ra
, у другой (2—6), наоборот, ее приращение
(рис. 7, б).
у одной части элементов ротора (1; 7—9)
наблюдается убывание напряженности
Н"ra
, у другой (2—6), наоборот, ее приращение
(рис. 7, б).
За счет явлений
магнитного запаздывания (гистерезиса)
процессы размагничивания и намагничивания
элементов ротора характеризуются
различными кривыми, образующими петли
(рис. 7, а).Так, изменение магнитного
состояния элемента 2 происходит по
кривой первоначального намагничивания
I, из точки 2' в точку 2", элемента 4 —
по кривой намагничивания а из точки 4'
в точку 4'\ а элемента 9 — по кривой
размагничивания б из точки 9' в точку
9". В результате индукция B"ra
в элементах ротора 1—9 распределится в
соответствии с пространственной
гистерезисной кривой II по закону,
представленному на рис. 7, в. Элементы
ротора с индукцией В"rm
будут отставать от оси внешнего поля
на угол
![]() (рис. 7, г).В результате взаимодействия
поля ротора с внешним полем кроме
радиальных сил тяжения возникают
тангенциальные силы, создающие вращающий
момент.
(рис. 7, г).В результате взаимодействия
поля ротора с внешним полем кроме
радиальных сил тяжения возникают
тангенциальные силы, создающие вращающий
момент.
Так как появление угла и образование момента обусловлены явлением гистерезиса, то такой угол и такой момент называют гистерезисными.
Вопрос №10: Каковы достоинства и недостатки СГД?
СГД способны втягивать в синхронизм значительные маховые массы, но имеют низкий коэффициент мощности и склонны к качаниям.