

Глава №15: Электрические машины систем синхронной связи
Вопрос №1: Что называется электрической системой синхронной связи?
Синхронная связь – электрическая связь, которая обеспечивает одновременное вращение или одновременный поворот двух или нескольких механически не связанных, находящихся на расстоянии друг от друга осей механизмов. В технике основные виды систем синхронной связи: система синхронного вращения, система синхронного поворота. Система синхронного вращения – применяются там, где надо осуществить синхронное вращение двух или нескольких находящихся на расстоянии друг от друга осей механизмов, имеющих значительные моменты сопротивления. Осуществляются с помощью АД с фазным ротором. Обмотки роторов двигателей в этом случае соединяются друг с другом, обмотки статоров питаются от одной и той же сети трёхфазного тока. Система синхронного поворота – применяются для целей дистанционного управления, регулирования и контроля. Чаще всего они осуществляются с помощью небольших индукторных машин – трёхфазных или однофазных сельсинов. В автоматике используются две системы синхронной связи: индикаторная и трансформаторная. Индикаторная система синхронной связи – применяется там, где момент сопротивления на ведомой оси мал по величине или совсем отсутствует. В индикаторной системе сельсин-приёмник самостоятельно отрабатывает угол, задаваемый сельсином-датчиком. Трансформаторная система синхронной связи – применяется там, где на ведомой оси имеется значительный момент сопротивления. В трансформаторной системе принимающий сельсин отрабатывает задаваемый сельсином-датчиком угол не самостоятельно, а с помощью механически или электрически связанного исполнительного двигателя.
Вопрос №2: Опишите виды конструктивного исполнения сельсинов.
Трёхфазные сельсины – конструктивно не отличаются от обычных асинхронных машин с фазным ротором. Простейшая трёхфазная система синхронной связи представляет собой соединение двух одинаковых сельсинов: приёмника и датчика. Сельсины включаются в сеть переменного тока своими первичными обмотками, которыми могут быть как обмотки статора, так и обмотки ротора. Концы соответствующих фаз вторичных обмоток обоих сельсинов соединяются друг с другом.

В зависимости от порядка следования фаз приёмника и датчика сельсины в одном или разных направлениях. Системы передачи угла, осуществлённые с помощью трёхфазных сельсинов, не получили широкого распространения вследствие их недостатков – неравенства синхронизирующих моментов при вращении роторов по полю и против поля, малой динамической устойчивости и необходимости трёхфазной сети. Однофазные сельсины – это обычно небольшие индукционные машины, которые имеют однофазную обмотку возбуждения и трёхфазную обмотку синхронизации.

Однофазные сельсины делятся на индикаторные и трансформаторные в зависимости от систем, для работы в которых они предназначены, хотя принципиально любой сельсин может работать в обеих системах. Кроме обычных однофазных сельсинов в системах синхронной связи применяются ещё так называемые дифференциальные сельсины с трёхфазными обмотками на статоре и роторе. По конструкции сельсины делятся на контактные, имеющие скользящие контакты – кольца и щётки, и бесконтактные, не имеющие колец. Также используются магнитоэлектрические машины – магнесины, совмещённые сельсины – двигатели и поворотные трансформаторы. Сельсины делаются на 50, 400, 500 Гц.
Вопрос №3: Укажите дост-ва и недостатки бесконтактных сельсинов.
У контактных сельсинов основной недостаток – наличие кольцо - щёточного аппарата. Логично предположить, что бесконтактные сельсины лишены данных недостатков, а, следовательно, имеют большую надёжность и, производное от этого – большую долговечность в работе. К недостаткам можно отнести – более сложную конструкцию машины, не всякое предприятие или просто потребитель сможет заменить более дешёвые и простые в обслуживании контактные сельсины на бесконтактные. Также имеет место некоторая инерционность. Бесконтактные сельсины сложнее рассчитывать.
Вопрос №4: Каков принцип действия индикаторной системы синхронной связи?
Простейшая индикаторная система синхронной связи для дистанционной передачи угла состоит из двух одинаковых сельсинов и линии связи.

ОВ обоих сельсинов подключаются к однофазной сети переменного тока. Концы фаз обмотки синхронизации приёмника соединяются линией связи с концами фаз обмотки синхронизации датчика. Переменный ток ОВ сельсинов создаёт магнитный поток, который индуцирует в обмотках синхронизации сельсинов ЭДС. Значение ЭДС обмоток зависят от пространственного расположения относительно ОВ. Если фазы ОС датчика и приёмника расположены одинаково относительно соответствующих ОВ, то в соединённых между собой линией связи ОС индуцируются одинаковые и встречно направленные ЭДС. Эти ЭДС уравновешивают друг друга, и в цепи ОС ток отсутствует. Такое расположение роторов – согласованное. Если ротор датчика поворотом на некоторый угол вывести из согласованного положения, то равновесие ЭДС, индуцированных в одноимённых ОС, нарушится. В линии связи появится ток. В результате взаимодействия этих токов с магнитными потоками ОВ возникнут вращающие моменты как в датчике, так и в приёмнике, которые будут стремиться привести роторы сельсинов в согласованное положение. Вращающие моменты, приложенные к роторам датчика и приёмника, в случае их равенства, будут равны по величине и разнонаправлены. Так как ротор датчика после поворота затормаживается, то поворачиваться до согласованного положения будет ротор приёмника. Величина синхронизирующего момента зависит от угла рассогласования и от параметров сельсинов.
Вопрос №5: Что такое удельный синхронизирующий момент и от чего он зависит?
Удельный синхронизирующий момент – это момент, приходящийся на 1 градус угла рассоглосования. Удельный синхронизирующий момент является важным фактором, определяющим статическую точность работы индикаторных сельсин - приёмников. Выражение удельного синхронизирующего момента: Mуд=(с1/f)*(E2фm*x`q/(r`2q+x`2q))*sin1==(с2/f)*(E2фm*x`q/(r`2q+x`2q)). Чем больше удельный синхронизирующий момент, тем круче кривая синхронизирующего момента в начальной её части, следовательно – сельсин умеет маленькую погрешность.
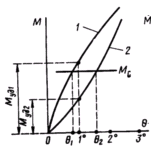
Как видно из рисунка при одинаковом моменте сопротивления погрешность первого сельсина меньше чем второго, имеющего меньший удельный синхронизирующий момент. Из выражения момента видно, что Mуд прямо пропорционален E2фm, а Eфm прямо пропорциональна Ф – потоку сельсина, а Ф прямо пропорционален U – напряжению питания. Это значит, что Mуд прямо пропорционален U2. Также имеет влияние частота, влияние от неё в обратной пропорциональности. Удельный синхронизирующий момент уменьшается при увеличении числа приёмников примерно по гиперболическому закону. MудN= Mуд1*2/(1+N).
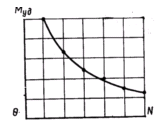
MудN – удельный момент каждого из приёмников, работающих от одного датчика; Mуд1 - удельный момент приёмника при работе от датчика тет-а-тет. На удельный момент большое влияние имеют параметры линии связи.
Вопрос №6: В каких режимах могут работать ДС?
Статический режим работы: Ротор отрабатывает некоторый угол, заданный датчиком.
Динамический режим работы. В целом ряде систем автоматики ротор сельсин - датчика не поворачивается на некоторый угол, как это происходит в статическом режиме работы, а непрерывно вращается с постоянной или переменной угловой скоростью. Ротор сельсин - приёмника при этом следует за ротором датчика.
Вопрос №7: Объясните принцип действия сельсинов в трансформаторном режиме.

Простейшая трансформаторная система состоит из двух сельсин - приёмников и датчика, соединённых линией связи, усилителя и исполнительного двигателя, вал которого механически соединён с валом сельсина-приёмника (обратная механическая связь). Принцип действия состоит в следующем. При выводе ротора сельсин - датчика из согласованного режима на выходной обмотке сельсин - приёмника появляется напряжение Uвых. Это напряжение подаётся на вход усилителя, и, после преобразования его усилителем, попадает на обмотку управления исполнительного двигателя. Ротор двигателя начинает вращаться, поворачивая при этом ротор сельсин - приёмника, с которым он механически связан. Вместе с ротором приёмника поворачивается в пространстве и его магнитный поток Фп; изменяется потокосцепление с выходной обмоткой и её ЭДС. Роторы двигателя и сельсин - приёмника поворачиваются до тех пор, пока ротор сельсин - приёмника не повернётся на заданный датчиком угол и сельсины не займут согласованного положения, в котором поток перпендикулярен оси выходной обмотки ОВп и выходное напряжение, а, следовательно, и напряжение на усилителе и на обмотке управления исполнительного двигателя, равны нулю. По проводам линии связи всегда протекают токи. Сельсин - приёмники питаются не от сети, а от обмотки синхронизации датчика.
Вопрос № 8: Что такое удельное выходное напряжение и от чего оно зависит?
Удельное выходное напряжение – напряжение при угле рассогласования в 1 градус. Данный параметр определяет качество работы сельсинов, в частности определяет чувствительность всей системы. Зависит от числа витков выходной обмотки прямо пропорционально, но этот способ увеличения Uуд не всегда рационален ибо увеличение числа витков ведёт на путь увеличения собственного сопротивления выходной обмотки, следовательно, к увеличению внутреннего падения напряжения на ней, к падению выходной мощности, что приводит к увеличению коэффициента усиления и в конечном итоге к увеличению габаритов и даже стоимости!
Вопрос №9: Назовите факторы, влияющие на точность работы сельсинов в индикаторном и трансформаторных режимах.
Индикаторный режим.
Удельный синхронизирующий момент Муд – момент, приходящийся на 10 рассогласования.
Момент сопротивления на валу приёмника Мс.
Добротность сельсина Д – отношение удельного синхронизирующего момента к моменту трения Д=Муд/Мт.
Магнитная или электрическая нессиметрия.
Небаланс ротора.
Время успокоения – время, в течении которого успокаивается ротор приёмника после рассогласования на 1790.
Точность сельсин – датчиков, режим работы.
Трансформаторный режим.
Значение остаточного напряжения – напряжения на выходной обмотке сельсин – приёмника в согласованном положении, когда магнитный поток приёмника перпендикулярен оси выходной обмотки.
Удельное выходное напряжение – напряжение при угле рассогласования в 1 градус.
Удельная выходная мощность Руд – максимальная мощность, которую может отдать выходная обмотка приёмника при угле рассогласования в 10.
Магнитная или электрическая нессиметрия.
Сопротивление линии связи.
Количество приёмников, работающих от одного датчика.
Частота вращения роторов.
Вопрос№10: Объясните принцип работы систем синхронной связи на магнесинах.
В тех случаях, когда датчик и приёмник находятся на небольшом расстоянии друг от друга и вал приёмника не нагружен, системы синхронной связи осуществляют с помощью бесконтактных электрических машин – магнесинов. Магнесин состоит из тороидального статора без пазов, набранного из листов электротехнической стали. На статоре располагается кольцевая однофазная обмотка, питающаяся от сети переменного тока. Обмотка имеет две отпайки. Углы между ними, а также между отпайками и концами обмоток равны 1200. Ротор – постоянный цилиндрический магнит.

В магнесине два потока. Ф1 создаётся переменным током однофазной обмотки, поступающим из сети. Он замыкается по тороиду статора и изменяется с частотой сети. Ф2 создаётся постоянным магнитом ротора и замыкается по ротору и тороиду статора. При питании статора тороид статора то насыщается, когда Ф1 максимален, то ненасыщен, когда поток минимален. За один период статор дважды насыщается. Магнитное сопротивление статора пропорционально двойной частоте сети. При изменении магнитного сопротивления тороида Ф2 тоже изменяется с той же двойной частотой. Ф2 наводит в обмотках статора ЭДС, значение которых зависит от положения ротора. По обмоткам магнесина и проводам линии связи протекают токи двойной частоты. МДС обмоток, взаимодействуя с Ф2 магнесинов, создают синхронизирующий момент. Токи, поступающие от источника питания и изменяющиеся с двойной частотой, в проводах линии связи отсутствуют. Объясняется тем, что одноимённые отпайки обмоток и концы обмоток по отношению к напряжению сети являются равнопотенциальными точками.