

Министерство образования и науки Российской Федерации
Государственное образовательное учреждение высшего профессионального образования
«Национальный исследовательский томский политехнический университет» а. Ю. Чернышев, и. А. Чернышев моделирование в электроприводе
Рекомендовано в качестве учебно-методического пособия
Редакционно-издательским советом
Томского политехнического университета
Издательство
Томского политехнического университета
2012
|
УДК 62-83 (075.8) ББК 31 271Я73 Ч–496
|
Ч–496
|
Чернышев А.Ю. Моделирование в электроприводе / А.Ю. Чернышев, И.А. Чернышев; Томский политехнический университет. – Томск: Изд-во Томского политехнического университета, 2012. – 157 с.
|
В учебно-методическом пособии рассмотрены вопросы выбора двигателя по мощности и последовательность расчета статических и динамических характеристик электроприводов постоянного и переменного тока с релейно-контакторным управлением при пуске, регулировании скорости и торможении; представлены методика и примеры расчета параметров якорной цепи двигателей постоянного тока и схемы замещения асинхронных двигателей.
Пособие подготовлено на кафедре электропривода и электрооборудования ТПУ и предназначено для студентов, обучающихся по специальности 140604 «Электропривод и автоматика промышленных установок и технологических комплексов».
УДК 62-83 (075.8)
ББК 31.291Я73
Рецензенты
Доктор технических наук, профессор кафедры конструирования
электронно-вычислительной аппаратуры ТУСУР
В.А. Бейнарович
Кандидат технических наук, доцент кафедры электроники
и автоматики физических установок СГТА
В.Б. Терехин
© ГОУ ВПО «Томский политехнический университет», 2012
© Чернышев А.Ю., Чернышев И.А., 2012
Чернышев А.Ю., Чернышев И.А., 2012
© Оформление. Издательство Томского политехнического университета, 2012

Пример 4.2. Для короткозамкнутого асинхронного двигателя типа АИР90L2 определить параметры Т-образной схемы замещения. Двигатель имеет следующие технические данные [4]: Здесь ЕНТЕРНЕТ.
номинальная мощность
 кВт;
кВт;
номинальное фазное напряжение
 В;
В;
синхронная частота вращения
 об/мин;
об/мин;
номинальное скольжение
 о. е.;
о. е.;
коэффициент полезного действия электродвигателя в режиме номинальной мощности (100%-я нагрузка)
 %;
%;
коэффициент мощности в режиме номинальной мощности
 о. е.;
о. е.;кратность пускового тока
 о. е.;
о. е.;кратность пускового момента
 о. е.;
о. е.;кратность максимального момента
 о. е.;
о. е.;кратность минимального момента
 о. е.
о. е.
Решение
(Для определения параметров схемы замещения асинхронного двигателя можно воспользоваться математической системой Mathcad и программой ИДЗ 2200.xmcd)
Найдем ток холостого хода асинхронного двигателя

 А,
А,
где
![]() А – номинальный ток статора двигателя;
А – номинальный ток статора двигателя;
![]() – число фаз асинхронного
двигателя;
– число фаз асинхронного
двигателя;
![]() А – ток статора двигателя при частичной
загрузке;
А – ток статора двигателя при частичной
загрузке;
![]() о. е. – коэффициент мощности при частичной
загрузке (см. рис. 4.6);
о. е. – коэффициент мощности при частичной
загрузке (см. рис. 4.6);
![]() о. е. – КПД при частичной загрузке;
о. е. – КПД при частичной загрузке;
![]() о. е. – коэффициент загрузки двигателя.
о. е. – коэффициент загрузки двигателя.
Критическое скольжение
![]()
![]() о.е.
о.е.
Значение коэффициента
![]() ,
согласно [7], находится
в диапазоне 0,6
,
согласно [7], находится
в диапазоне 0,6![]() 2,5.
Принимаем =1,3.
2,5.
Принимаем =1,3.
Определим коэффициенты:
![]() ;
;
![]()
![]() .
.
Активное сопротивление ротора, приведенное к обмотке статора асинхронного двигателя,
![]() Ом.
Ом.
Активное сопротивление обмотки статора
![]() Ом.
Ом.
Определим параметр ,
который позволяет найти индуктивное
сопротивление короткого замыкания
![]() :
:
![]() .
.
Тогда
![]() .
.
Индуктивное сопротивление рассеяния фазы роторной обмотки, приведенное к статорной, может быть рассчитано по уравнению
![]() Ом.
Ом.
Индуктивное сопротивление рассеяния фазы статорной обмотки может быть определено по следующему выражению:
![]() Ом.
Ом.
ЭДС ветви намагничивания
![]() ,
наведенная потоком воздушного зазора
в обмотке статора в номинальном режиме,
равна
,
наведенная потоком воздушного зазора
в обмотке статора в номинальном режиме,
равна
![]()
![]() В,
В,
тогда индуктивное сопротивление контура намагничивания
![]() Ом.
Ом.
В том случае если параметры схемы замещения асинхронного двигателя определены по его каталожным данным, необходимо их проверить, рассчитав статические электромеханические и механические характеристики двигателя, сравнив их контрольные точки с паспортными данными двигателя, а также рассчитать переходные процессы прямого пуска двигателя, убедившись в его устойчивости.
4.2.5. Составление динамической модели асинхронного
двигателя в неподвижной системе координат
Для окончательной проверки правильности определения параметров схемы замещения асинхронного двигателя рассчитаем переходные процессы пуска двигателя прямым включением в сеть с учетом электромагнитных процессов.
Исходная система дифференциальных
уравнений, описывающая асинхронный
двигатель с короткозамкнутым ротором
в векторной форме записи в неподвижной
системе координат
![]() ,
имеет вид:
,
имеет вид:
![]() (4.35)
(4.35)
![]() (4.36)
(4.36)
![]() (4.37)
(4.37)
![]() (4.38)
(4.38)
где
![]() – вектор напряжения обмотки статора в
неподвижной системе координат;
– вектор напряжения обмотки статора в
неподвижной системе координат;
![]() – вектор тока обмотки статора в
неподвижной системе координат;
– вектор тока обмотки статора в
неподвижной системе координат;
![]() – вектор потокосцепления обмотки
статора в неподвижной системе координат;
– вектор потокосцепления обмотки
статора в неподвижной системе координат;
![]() – вектор тока обмотки ротора в неподвижной
системе координат;
– вектор тока обмотки ротора в неподвижной
системе координат;
– вектор потокосцепления обмотки статора в неподвижной системе координат;
![]() – вектор потокосцепления обмотки ротора
в неподвижной системе координат;
– вектор потокосцепления обмотки ротора
в неподвижной системе координат;
![]() – индуктивность обмотки статора, равная
индуктивности рассеяния обмотки статора
и индуктивности от главного поля;
– индуктивность обмотки статора, равная
индуктивности рассеяния обмотки статора
и индуктивности от главного поля;
![]() – индуктивность обмотки ротора,
приведенная к обмотке статора, равная
индуктивности рассеяния обмотки ротора
приведенной к обмотке статора и
индуктивности от главного поля;
– индуктивность обмотки ротора,
приведенная к обмотке статора, равная
индуктивности рассеяния обмотки ротора
приведенной к обмотке статора и
индуктивности от главного поля;
![]() – индуктивность от главного поля
(контура намагничивания), создаваемая
суммарным действием токов статора;
– индуктивность от главного поля
(контура намагничивания), создаваемая
суммарным действием токов статора;
![]() – электрическая скорость вращения
ротора.
– электрическая скорость вращения
ротора.
Электромагнитный момент асинхронного
двигателя можно выразить
через любую пару векторов [2, 3]
![]() .
При решении данной задачи наиболее
целесообразно определять электромагнитный
момент асинхронного двигателя через
векторы тока статора
.
При решении данной задачи наиболее
целесообразно определять электромагнитный
момент асинхронного двигателя через
векторы тока статора
![]() и потокосцепления ротора
и потокосцепления ротора
![]()
![]() (4.39)
(4.39)
где
![]() – вектор потокосцепления, комплексно
сопряженный с вектором потокосцепления
обмотки ротора
– вектор потокосцепления, комплексно
сопряженный с вектором потокосцепления
обмотки ротора
![]() .
.
Электромеханические процессы в
электроприводе описываются уравнением
движения. Для случая
![]()
![]() , (4.40)
, (4.40)
где
![]() – электромагнитный момент, развиваемый
асинхронным двигателем;
– электромагнитный момент, развиваемый
асинхронным двигателем;
![]() – момент сопротивления механизма,
приведенный к валу двигателя;
– момент сопротивления механизма,
приведенный к валу двигателя;
![]() – момент инерции электропривода,
приведенный к валу двигателя,
– момент инерции электропривода,
приведенный к валу двигателя,
![]() .
.
Преобразуем систему уравнений (4.35) –
(4.38), оставив в качестве переменных,
описывающих асинхронный двигатель,
пространственные векторы тока статора
![]() и потокосцепления ротора
и потокосцепления ротора
![]() ,
исключив промежуточные переменные
и
,
исключив промежуточные переменные
и
![]() .
.
Систему уравнений (4.35) – (4.38), содержащую четыре переменных вектора состояния , , , можно преобразовать в два уравнения, содержащих два переменных вектора и , входящих в принятое выражение электромагнитного момента асинхронного двигателя (4.39).
Введем следующие обозначения:
![]() ;
;
![]() ;
;
![]() ;
;
 . (4.49)
. (4.49)
Упростим уравнения (4.42) и (4.48), подставив в них обозначения (4.49), получим
![]() , (4.50)
, (4.50)
![]() . (4.51)
. (4.51)
Преобразуем уравнения (4.50) и (4.51) из векторной формы записи в скалярную, записав их через проекции векторов на оси неподвижной правой декартовой системы координат. Пространственные векторы в этом случае представляются следующим образом:
![]() ;
;
![]() ;
;
![]() .
.
Графическое разложение векторов на
их составляющие по осям
представлено на рис. 4. 13, там же показано,
что умножение вектора на
![]() равносильно его повороту на
равносильно его повороту на
![]()
Рис. 4.13. Представление
вектора тока
![]() в осях
в осях
![]()
Тогда уравнения (4.50) и (4.51) представляются в следующем виде:
![]() ; (4.52)
; (4.52)
![]() ; (4.53)
; (4.53)
![]() ; (4.54)
; (4.54)
![]() , (4.55)
, (4.55)
где
![]() – напряжение обмотки статора асинхронного
двигателя, ориентированная вдоль оси
– напряжение обмотки статора асинхронного
двигателя, ориентированная вдоль оси
![]() неподвижной декартовой системы координат
неподвижной декартовой системы координат
![]() ,
В;
,
В;
![]() – напряжение обмотки статора асинхронного
двигателя,
ориентированная вдоль
оси
– напряжение обмотки статора асинхронного
двигателя,
ориентированная вдоль
оси
![]() неподвижной декартовой системы
координат
,
В;
неподвижной декартовой системы
координат
,
В;
![]() – амплитудное значение фазного напряжения
обмотки статора, В;
– амплитудное значение фазного напряжения
обмотки статора, В;
![]() – действующее значение фазного
напряжения обмотки статора, В;
– действующее значение фазного
напряжения обмотки статора, В;
![]() – составляющая вектора тока обмотки
статора, ориентированная вдоль оси
неподвижной системы координат, А;
– составляющая вектора тока обмотки
статора, ориентированная вдоль оси
неподвижной системы координат, А;
![]() – составляющая вектора тока обмотки
статора, ориентированная вдоль оси
неподвижной системы координат, А;
– составляющая вектора тока обмотки
статора, ориентированная вдоль оси
неподвижной системы координат, А;
![]() – составляющая вектора потокосцепления
обмотки ротора, ориентированная вдоль
оси
неподвижной системы координат, Вб;
– составляющая вектора потокосцепления
обмотки ротора, ориентированная вдоль
оси
неподвижной системы координат, Вб;
![]() – составляющая вектора потокосцепления
обмотки ротора, ориентированная вдоль
оси
неподвижной системы координат, Вб.
– составляющая вектора потокосцепления
обмотки ротора, ориентированная вдоль
оси
неподвижной системы координат, Вб.
Уравнения (4.52) – (4.55) после некоторых преобразований в операторной форме записи преобразуются к виду
![]() ; (4.56)
; (4.56)
![]() ; (4.57)
; (4.57)
![]() ; (4.58)
; (4.58)
![]() ; (4.59)
; (4.59)
Уравнение электромагнитного момента (4.39) в развернутом виде:
![]() ; (4.60)
; (4.60)
Уравнение движения (4.40) в операторной форме записи имеет следующий вид:
![]() , (4.61)
, (4.61)
где
![]() – эквивалентная электромагнитная
постоянная времени.
– эквивалентная электромагнитная
постоянная времени.
Уравнение движения (4.61) записано в скалярном виде. Это возможно в том случае, если характер нагрузки (активная или реактивная) будет учитываться в программе расчета переходных режимов асинхронного электропривода.
Структурная схема динамической модели короткозамкнутого асинхронного электродвигателя в неподвижной системе координат , соответствующая уравнениям (4.56) – (4.61) приведена на рис 4.14.
Анализ динамических процессов преобразования энергии в асинхронном двигателе представляет собой сложную задачу в связи с существенной нелинейностью уравнений, описывающих асинхронный двигатель, обусловленной произведением переменных. Поэтому исследование динамических характеристик асинхронного двигателя целесообразно вести с применением средств вычислительной техники.
Пример 4.4. Для короткозамкнутого асинхронного двигателя типа АИР90L2 рассчитать и построить переходные процессы скорости, момента, тока статора, а также динамическую механическую характеристику. Основные параметры двигателя и его схемы замещения:
номинальная мощность двигателя
 кВт;
кВт;
номинальное фазное напряжение
 ;
;номинальная скорость двигателя
 ;
;номинальный ток обмотки статора
 ;
;активное сопротивление фазы обмотки статора
 Ом;
Ом;индуктивное сопротивление рассеяния фазы обмотки статора
 Ом;
Ом;активное сопротивление ротора, приведенное к обмотке статора,
 Ом;
Ом;индуктивное сопротивление рассеяния фазы обмотки ротора, приведенное к обмотке статора,
 Ом;
Ом;индуктивное сопротивление контура намагничивания,
 Ом.
Ом.кратность пускового тока о. е.;
кратность максимального момента о. е.;
кратность минимального момента о. е.;
момент инерции двигателя
 .
.
Решение. Динамическую модель асинхронного двигателя составим в соответствии с его структурной схемой, приведенной на рис. 4.14. Моделирование асинхронного двигателя будем производить в абсолютных единицах, так как современные программные средства для численных вычислений, расчетов и математического моделирования, например, MATLAB позволяют автоматически устанавливать масштаб моделирования независимо от мощности двигателя или его параметров.
Найдем дополнительные параметры структурной схемы в соответствии с принятыми обозначениями (4.49):
Индуктивность рассеяния обмотки статора
![]() Гн.
Гн.
Индуктивность рассеяния обмотки ротора, приведенная к обмотке статора
![]() Гн.
Гн.
Индуктивность контура намагничивания
![]() Гн.
Гн.
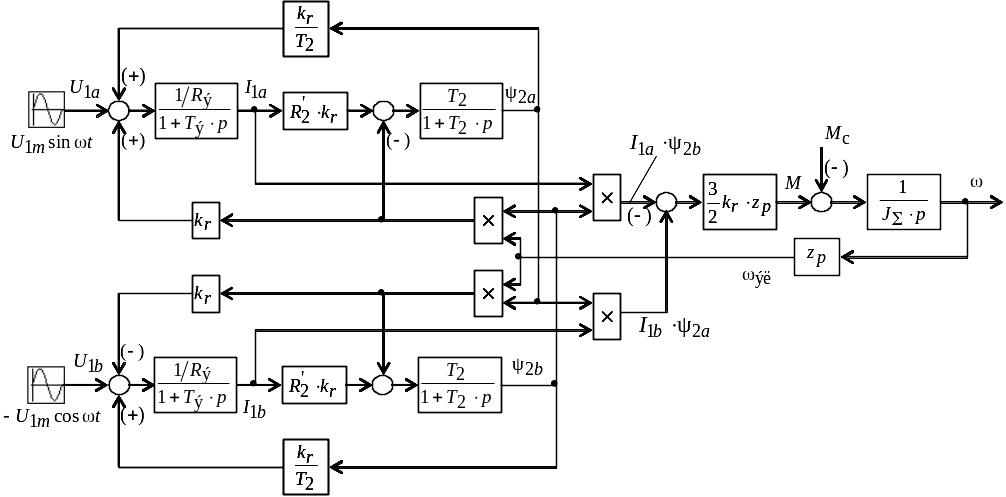
Рис 4.14. Структурная схема короткозамкнутого асинхронного двигателя в неподвижной системе координат a, jb
Индуктивность обмотки статора
![]() Гн.
Гн.
Индуктивность обмотки ротора
![]() Гн.
Гн.
Коэффициент
![]() о.е.
о.е.
Эквивалентное активное сопротивление
![]() Ом.
Ом.
Эквивалентная индуктивность
![]() Гн.
Гн.
Эквивалентная индуктивная постоянная времени
![]() c.
c.
Индуктивная постоянная времени обмотки ротора
 с.
с.
Схема имитационной модели короткозамкнутого асинхронного двигателя, составленная в неподвижной системе координат a, jb в программной среде MATLAB, приведена на рис. 4.15.
Графики переходных процессов скорости
![]() момента
момента
![]() и тока статора
и тока статора
![]() при пуске асинхронного двигателя прямым
включением в сеть приведены на рис. 4.16
– 4.18.
при пуске асинхронного двигателя прямым
включением в сеть приведены на рис. 4.16
– 4.18.
Анализ графиков показывает, что при
отработке переходных процессов без
нагрузки (режим идеального холостого
хода) асинхронный двигатель разогнался
до синхронной скорости
![]() ,
его электромагнитный момент установился
равным нулю, а ток статора двигателя в
установившемся режиме незначительно
отличается от тока статора холостого
хода статических характеристик (
,
его электромагнитный момент установился
равным нулю, а ток статора двигателя в
установившемся режиме незначительно
отличается от тока статора холостого
хода статических характеристик (![]() А):
А):
![]() А,
А,
где
![]() – амплитудное значение тока статора
холостого хода.
– амплитудное значение тока статора
холостого хода.

Рис. 4.15. Схема имитационной модели короткозамкнутого асинхронного двигателя
в неподвижной системе координат a, jb
В момент времени
![]() с на валу двигателя произведен наброс
нагрузки, равный номинальному моменту
двигателя
с на валу двигателя произведен наброс
нагрузки, равный номинальному моменту
двигателя
![]() .
.
При отработке возмущающего воздействия
установившаяся скорость двигателя
уменьшилась до номинальной скорости
![]() ,
электромагнитный момент в установившемся
режиме стал равен статическому моменту
на валу двигателя
,
а ток статора двигателя незначительно
отличается от номинального тока статора
(6,113 А) статических характеристик
двигателя:
,
электромагнитный момент в установившемся
режиме стал равен статическому моменту
на валу двигателя
,
а ток статора двигателя незначительно
отличается от номинального тока статора
(6,113 А) статических характеристик
двигателя:
![]() А,
А,
где
![]() – амплитудное значение номинального
тока статора.
– амплитудное значение номинального
тока статора.
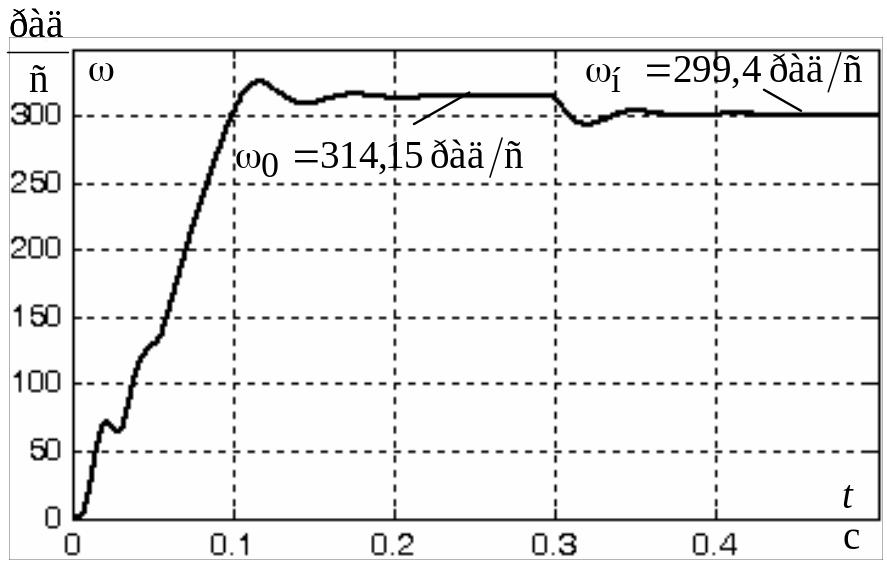
Рис. 4.16. График
переходного процесса скорости
![]()
при пуске асинхронного двигателя прямым включением в сеть

Рис. 4.17. График
переходного процесса момента
![]()
при пуске асинхронного двигателя прямым включением в сеть
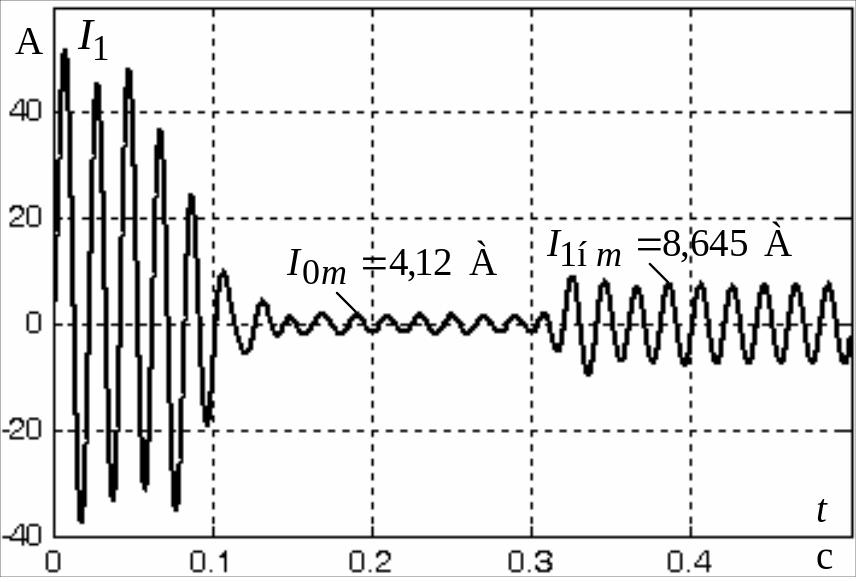
Рис. 4.18. График
переходного процесса тока
статора
![]()
при пуске асинхронного двигателя прямым включением в сеть
По результатам расчета переходных процессов на рис. 4.19 построена динамическая механическая характеристика асинхронного двигателя при пуске прямым включением в сеть с последующим набросом нагрузки до .
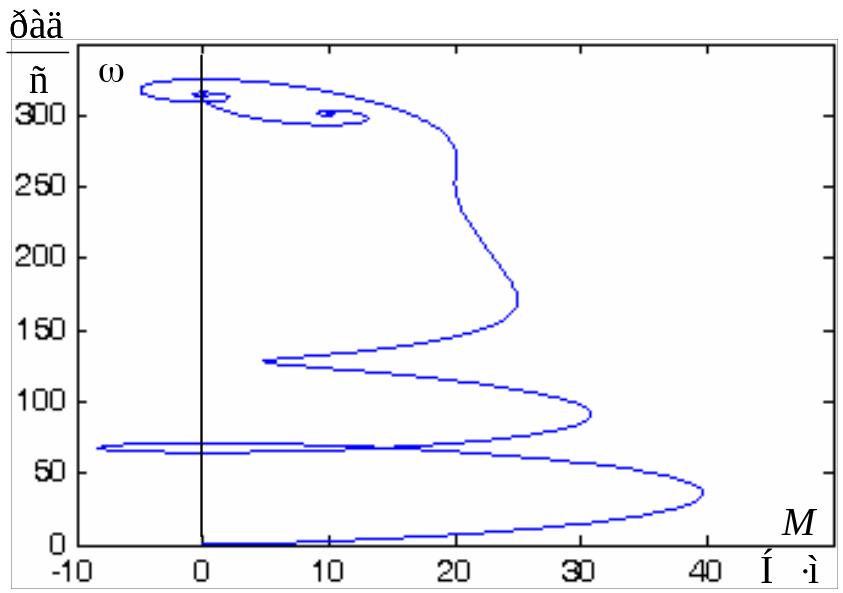
Рис. 4.19. Динамическая механическая характеристика асинхронного
двигателя при пуске прямым включением в сеть
Анализ динамической механической
характеристики асинхронного двигателя
показывает, что максимальный ударный
момент при пуске превышает номинальный
момент
![]() статической механической характеристики
в 4 раза и может достичь недопустимо
больших по механической прочности
значений, поэтому желательно в дальнейшем
исследовать переходные режимы пуска
асинхронного двигателя от тиристорных
пусковых устройств.
статической механической характеристики
в 4 раза и может достичь недопустимо
больших по механической прочности
значений, поэтому желательно в дальнейшем
исследовать переходные режимы пуска
асинхронного двигателя от тиристорных
пусковых устройств.
Выводы.
Анализ графиков переходных процессов тока, скорости и момента показал, что асинхронный электродвигатель с найденными параметрами схемы замещения является устойчивым звеном и эти параметры можно использовать в дальнейшем при исследовании и настройке систем регулирования с применением данного двигателя.
Имитационная модель, созданная в программной среде MATLAB адекватно отображает переходные режимы, в короткозамкнутом асинхронном двигателе и может быть использована при исследовании его динамических процессов.