

Анализ систем
Пакет Control предоставляет широкий набор процедур, осуществляющих анализ САУ с самых различных точек зрения и, прежде всего, определение откликов системы на внешние воздействия, как во временной, так и в частотной областях.
Для нахождения временных откликов системы на внешние воздействия некоторых видов предусмотрены функции:
impulse – Нахождение отклика системы на импульсное входное воздействие;
step – Нахождение реакции системы на единичный скачок входного воздействия;
initial – Определение собственного движения системы при произвольных начальных условиях;
lsim – Определение реакции системы на заданное входное воздействие.
Воспользуемся данными процедурами для моделирования системы управления торпедой созданной в предыдущем разделе:
>> step(sys)
Используя эту команду можно получить ступенчатую переходную характеристику представленную на рис. 9. импульсную переходную характеристику (см. рис. 10) можно получить при помощи команды:
>> impulse(sys)
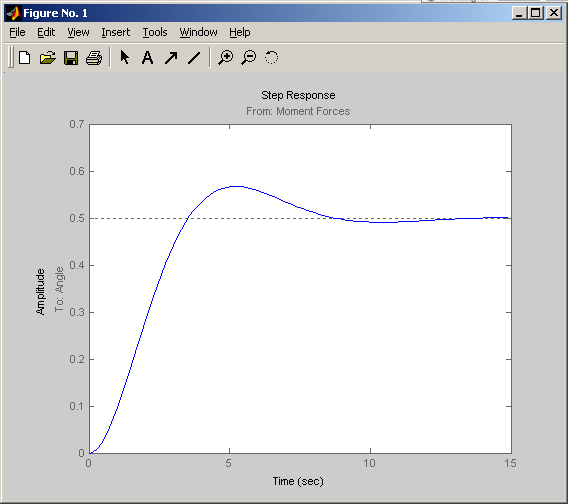
Рис. 9 Ступенчатая переходная характеристика
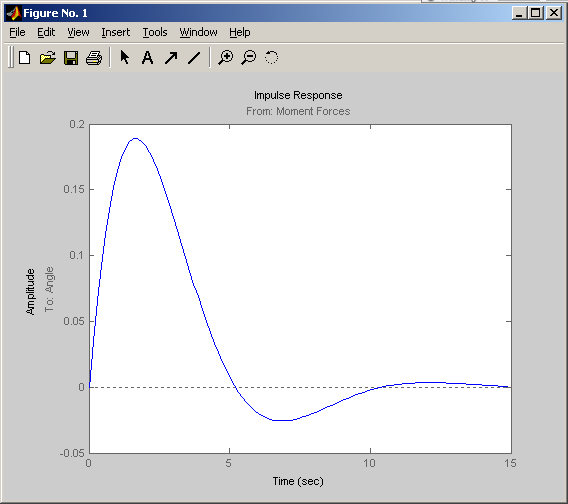
Рис.10 Импульсная переходная характеристика
Для моделирования системы при произвольном входном воздействии применяется процедура Lsim. Данная процедура применяется в виде Lsim(sys,u,t) где sys – имя модулируемой системы, u – вектор входного воздействия, t – вектор времени. Например моделирование ранее созданной системы управления торпедой при входном воздействии
![]() где
где
![]()
шаг изменения времени равен 0,001 будет осуществляться при помощи следующего набора команд:
>> t=0:0.001:10;
>> u=sin(2*t.^2+t);
>> lsim(sys,u,t);
Результат моделирования показан на рис.11.
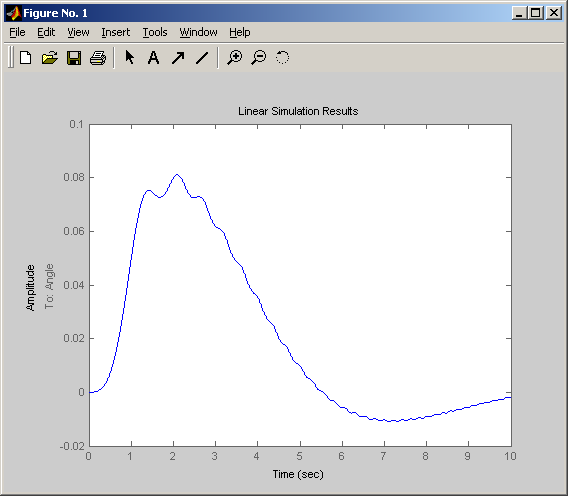
Рис. 11 Моделирование при произвольном входном воздействии
Для построения отклика в частотной области применяются следующие процедуры:
bode – Строит амплитудночатотную и фазочастотную характеристики (диаграмму Боде) указанной системы;
nyquist – строит в комплексной плоскости график амплитудно-фазовой характеристики (АФХ) системы в полярных координатах;
nichols – строит карту Николса системы, т. е. график АФХ разомкнутой системы в декартовых координатах;
sigma – строит графики зависимости частоты сингулярных значений системы; обычно совпадает с АЧХ системы.
Воспользуемся данными процедурами для исследования ранее созданной системы:
>> bode(sys)
>> nyquist(sys)
>> nichols(sys)
>> sigma(sys)
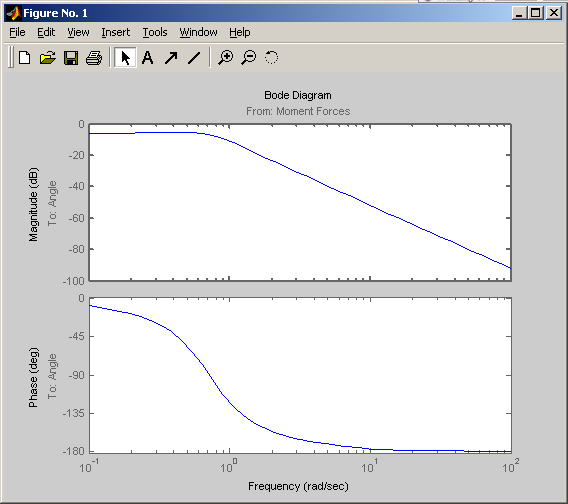
Рис. 12 Диаграмма Боде

Рис. 13 Диаграмма Найквиста

Рис. 14 Диаграмма Николса

Рис.15 График зависимости частоты сингулярных значений системы
Теперь рассмотрим процедуры, вычисляющие отдельные характеристики и графически показывающие расположение полюсов и нулей системы:
pole – расчет полюсов системы;
zpkdata – расчет полюсов, нулей и коэффициентов передачи системы;
gram – вычисление граммианнов системы;
pzmap – построение на комплексной плоскости нулей и полюсов системы;
damp – вычисление собственных значений системы;
rlocus – расчет и вывод в виде графиков и графическое окно траектории движения на комплексной плоскости корней полинома:
![]()
где
![]() - знаменатель передаточной функции;
- знаменатель передаточной функции;
![]() - числитель, при изменении положительного
числа
- числитель, при изменении положительного
числа
![]() от 0 до бесконечности.
от 0 до бесконечности.
Для удобства использования средств control в состав пакта был включен специальный интерактивный обозреватель, который можно вызвать командой ltiview, окно которого представлено на рис 16. При помощи команды File Export можно экспортировать систему в обозреватель. При помощи команды Edit Plot Configuration можно выбирать характеристики для построения.
Рис. 16 Интерактивный обозреватель Ltiview