

40. Электронный визир направления (эвн). Его назначение и способы формирования. (на примере нрлс «Наяда-5»).
В НРЛС с неподвижными взаимоперпендикулярными катушками существует два метода формирования электронного визира направления (ЭВН):
а) Метод формирования ЭВН в период между рабочим ходом основной развертки. Этот метод используется в НРЛС серии "Океан".
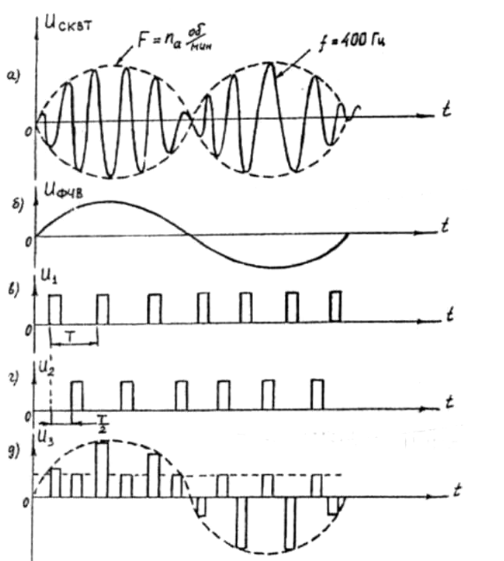
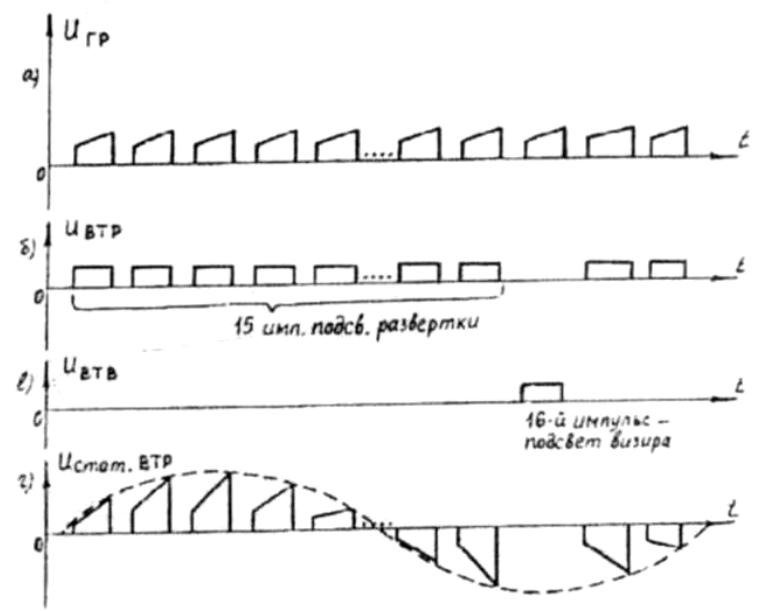
б) Второй метод формировании ЭВН заключается в том, что когда после N ходов основной развертки следует развертка визира. Этот метод используется в получении ЭВН НРЛС "Наяда-5".
41. Радиолокационные маяки-ответчики. Их назначение и характеристики
Назначение
РМО предпологает их работу с любой
судовой РЛС.
42 Радиолокационные ответчики .Их назначение и характеристики
Радиолокационный ответчик(РЛО) обеспечивает определение местоположения судов, терпящих бедствие, посредством передачи сигналов, которые на экране радиолокационной станции представлены серией точек, расположенных на равном расстоянии друг от друга в радиальном направлении. РЛО работает 9,2…9,5 ГГц.Характеристики
- обеспечивать ручное включение и выключение, индикацию в режиме готовности, иметь плавучий линь.
-сохранять работоспособность после сбрасывания в воду с высоты 20 метров.
-быть водонепроницыемым на глубине 10 метров не менее 5 минут
-сохранять работоспособность в диапозоне температур от -20*C до +55*C
-высота установки РЛО должна быть по крайней мере 1 метр над поверхностью моря.
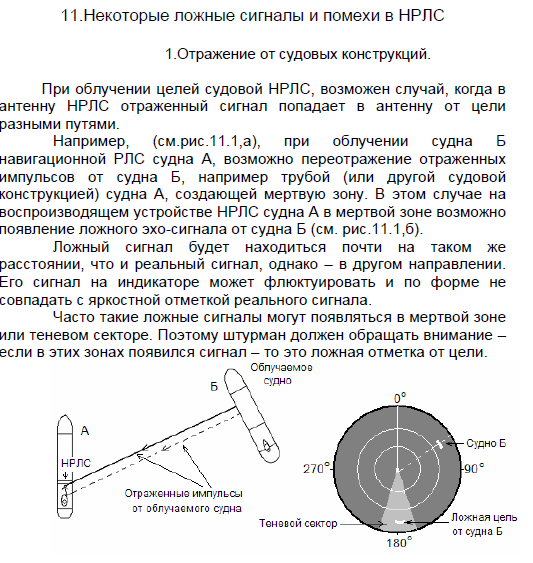
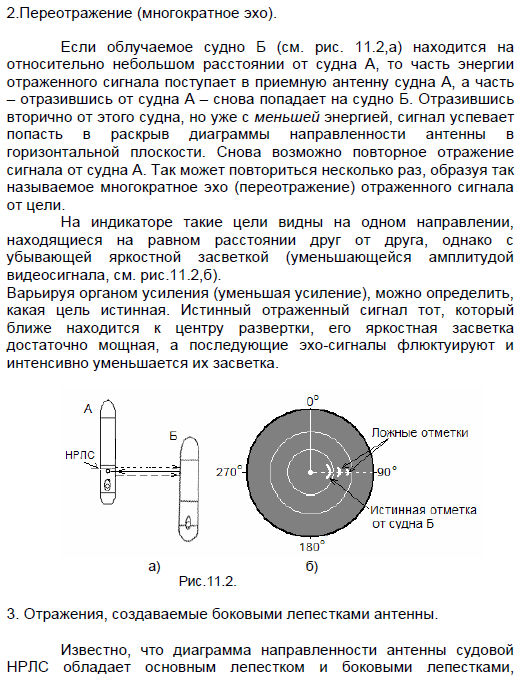
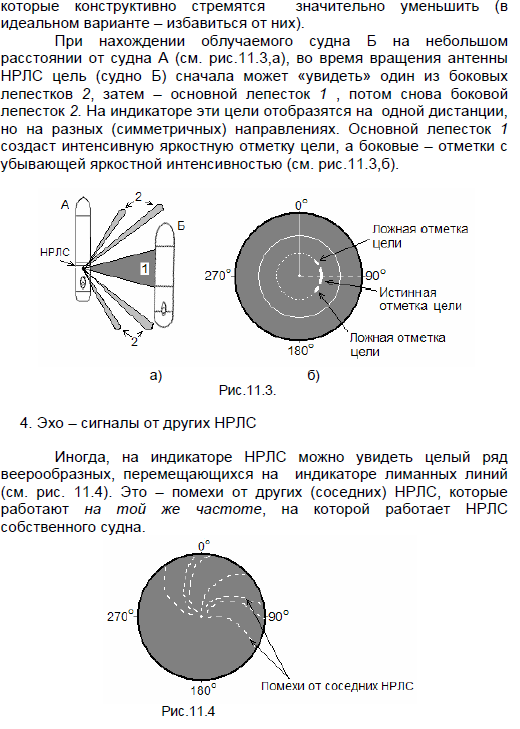
43. Некоторые ложные сигналы и помехи в НРЛС
44. Основные требования ИМО к эксплуатационно-техническим характеристикам САРП(DANGER)
Для повышения эффективности применения РЛС ИМО приняло решение об оснащении крупнотоннажных судов средствами, автоматизирующими процесс ведения радиолокационной прокладки и облегчающими решение задачи по предупреждению столкновения судов.(приблизительно стр170).
45.
Упрощенная обобщенная функциональная
схема САРП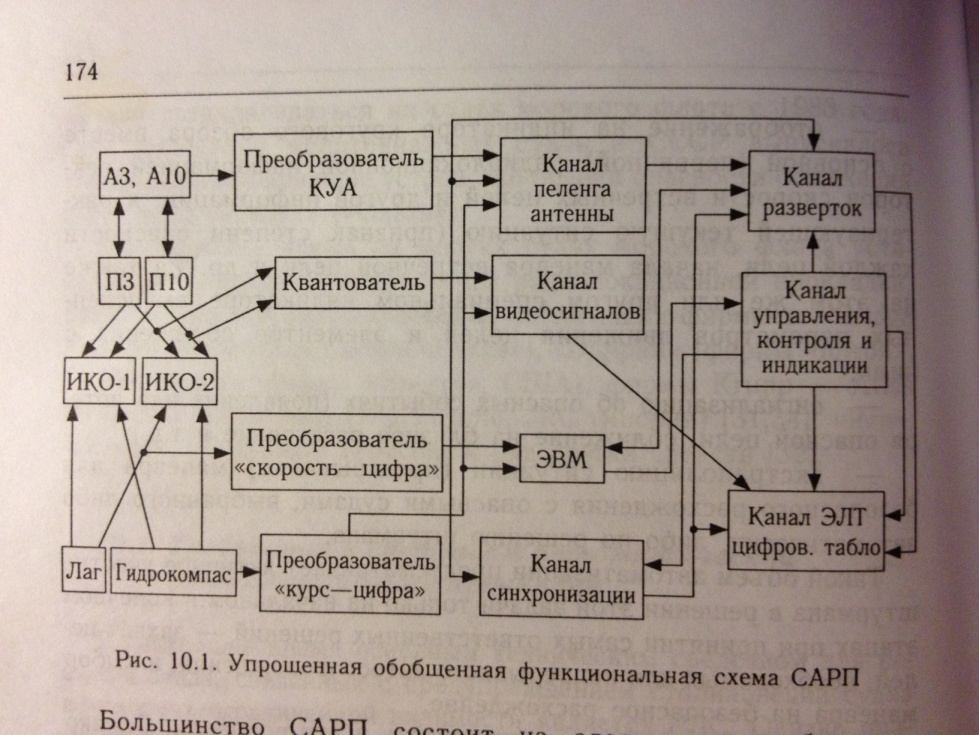
46.Данные, выдаваемые САРП, после обработки захваченной цели.
Текущее значение углового положения антенны в пространстве, видеосигналы об окружающей обстановке, импульсы синхронизации, скорость и курс(174) или(181)(184)-под картинками.
47. Привести перевод аббревиатур:САРП, ARPA, CPA, TCPA, EBL
САРП- средство автоматической радиолокационной прокладки
ARPA-automatic radar plotting aid
CPA- Closest Point of Approach
TCPA- Time to Closest Point of Approach
EBL-electronic bearing line
48. Назначение радионавигационных систем. Их виды.
Радионавигационные системы нужны для определения места судна. Имеются два основных режима работы РНС: Активный режим – судовая аппаратура содержит устройства, излучающие радиоволны. Примером такой РНС является радиолокационная система. Пассивный режим- на борту подвижного объекта не требуется устанавливать излучающую аппаратуру.
49. Фазовые рнс. Принцип их построения
В основе построения ФРНС лежит понятние «фоновый зонд». Наименование «фоновый зонд» указывает, что приемоизмеритель разностно-дальномерной(гиперболической) системы подобен некоторому зонду в электромагнитном поле береговых станций.
A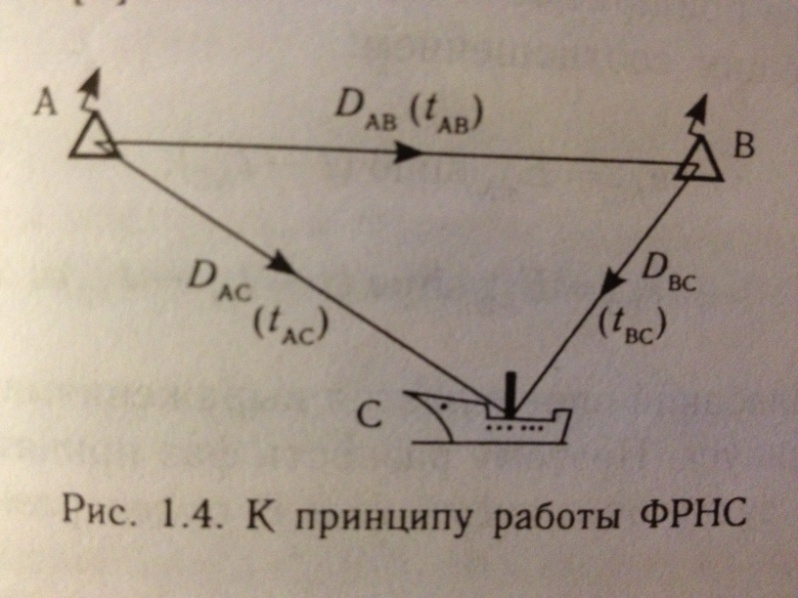 BC-
станции и судно :D
BC-
станции и судно :D
D- кратчайшее расстояние
t- колебания