

31. Временная автоматическая регулировка усиления приёмника рлс
Эффективным средством борьбы с помехами, возникающими от морского волнения, а также от близкорасположенных объектов, является временная автоматическая регулировка усиления (ВАРУ). (уровень «автоматической» регулировки определяется вручную самим оператором).
ВАРУ необходима для выравнивания интенсивности сигналов от объектов, расположенных на разных расстояниях от антенны НРЛС, тем самым обеспечивая одинаковое (равномерное) воспроизведение на экране индикатора целей, находящихся на различных дистанциях.
ВАРУ формирует управляющее напряжение (напряжение смещения в каскадах УПЧ) так, чтобы усиление приемника возрастало с увеличением дистанции до объекта.
Другим важным достоинством ВАРУ является возможность устранения помех, вызываемых отражением от взволнованной поверхности моря, которые постепенно убывают с расстоянием и являются однородными для различных направлений.
32. Способы уменьшения влияния на работу судовой РЛС отражений от морской поверхности и гидрометеоров.
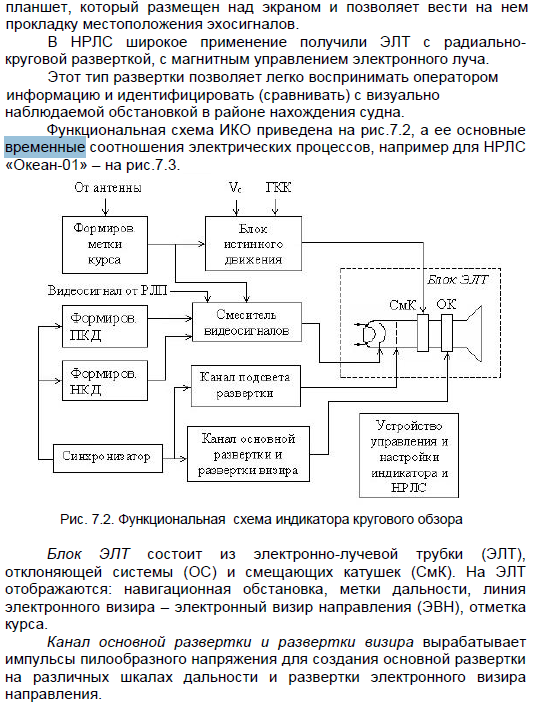
33. Упрощённая функциональная схема индикатора рлс. Основные временные соотношения.
34. Принцип получения радиально кругового обзора с неподвижной отклоняющей системой.

Для создания радиально-круговой развёртки в ортогональных катушках существует два способа:
А) расщепление фазы огибающей вращения антенны после генератора развёртки (например – НРЛС типа «Наяда»)
Б) расщепление фазы огибающей вращения антенны до генератора развёртки (например – НРЛС типа «Океан»)
35. Формирование радиально-круговой развёртки в рлс с модуляцией пилообразного напряжения углом поворота антенны после гпн (на примере нрлс «Наяда-5»)
По типу применяемой развертки на электронно - лучевой трубке (ЭЛТ) различают индикаторы с линейной, круговой, радиально - круговой, спиральной , а также с разверткой в прямоугольных координатах.
В судовых НРЛС наибольшее применение получили индикаторы кругового обзора (ИКО) с радиально - круговой разверткой. При этом радиальная развертка достигается за счет изменения электромагнитного поля в отклоняющих катушках ИКО по пилообразному закону. А по способу создания вращающегося, кругового, электромагнитного поля, ИКО делятся на индикаторы с вращающейся отклоняющей катушкой и на индикаторы с двумя неподвижными взаимно перпендикулярными катушками.
1) С помощью специальных устройств (СКВТ, ВТ) производится преобразование полярных координат в прямоугольные, т.е. получают синусоидальныне и косинусоидальные составляюшие вращения антенны
2)Полученными составляющими модулируют пилообразное напряжение, поступающее из генератора пилообразного (трапецеидального) напряжения.
3) С помощью неподвижных взаимоперпендикулярных катушек сигналы прямоугольных координат преобразуются результирующим магнитным полем отклоняющей катушки , расположенной на горловине ЭЛТ, в сигнал в полярной системе координат.
В НРЛС Наяда-5 формирование пилообразных импульсов тока для питания катушек – с расщеплением фазы огибающей вращения антенны после генератора развертки.