53)Методы определения места судна
Определение места судна с помощью ИСЗ предполагает решение трех отдельных задач, а именно:
определение координат спутника (его траекторных данных ) в момент измерения навигационного параметра;
относительную привязку, т. е. нахождение координат судна относительно спутника;
вычисление географических координат судна.
Координаты спутника и географические координаты судна определяются в результате обработки в ЭВМ судового приемоиндикатора, по специальной программе, траекторных данных ИСЗ и относительных координат ИСЗ — судно.
Для нахождения координат судна применимы, в большинстве своем, методы, которые используют обычно в наземных радионавигационных системах. Однако техническое решение определения места судна в спутниковых РНС достигается применением специальных методов определения.
Возможны следующие методы определения места с использованием ИСЗ
[1,2,3]:
угломерный — определяется угловая высота спутника;
доплеровский – использование эффекта Доплера – определение сдвига частоты излученного ИСЗ радиосигнала относительно опорной (эталонной) частоты приемоиндикатора;
радиально-скоростной — определяется скорость сближения спутника с судном, что равносильно использованию гиперболической РНС с изменяющейся длиной базы;
разностно-дальномерный — определяется разность расстояний до одного и того же спутника в различных точках его движения по орбите, что равносильно использованию гиперболической РНС с перемещающейся базой. (Этот метод применялся в СРНС «Транзит» и «Цикада»).
дальномерный — определяется наклонная дальность до спутника. Разновидность дальномерного метода - псевдодальномерный метод.
В СРНС «Навстар» и «ГЛОНАСС» используют псевдодальномерный, а также доплеровский методы определения места судна.
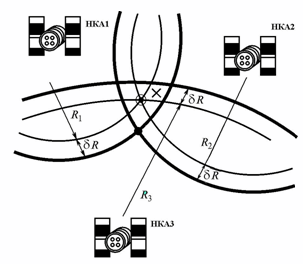
54)Пассивный псевдодальномерный способ определения места.
В
псевдодальномерных методах в качестве
навигационного параметра выступает
псевдодальность
![]() .
Поверхностью положения по-прежнему
является сфера с центром в точке центра
масс НКА, но радиус этой сферы отличается
от истинной дальности R
на неизвестную величину δR
. Шкалы времени НКА синхронизированы с
высокой точностью, величина задержки
δR
= cτn
считается
одинаковой для всех НКА.
Измерение
псевдодальностей до трех НКА приводит
к системе трех уравнений, содержащих
четыре неизвестных – координаты
потребителя x,
y, z
и задержку δR.
Для устранения возникшей неопределенности
необходимо провести дополнительное
измерение, т. е. измерить псевдодальность
до четвертого спутника. Именно
необходимость нахождения в зоне видимости
четырех НКА в значительной степени
определяет структуру и параметры
орбитальной группировки НКА.
Псевдодальномерный метод не накладывает
жестких ограничений на значение
погрешности временной шкалы потребителя,
поскольку позволяет одновременно с
определением местоположения вычислять
вычислить эту погрешность и, при
необходимости, скорректировать ее.
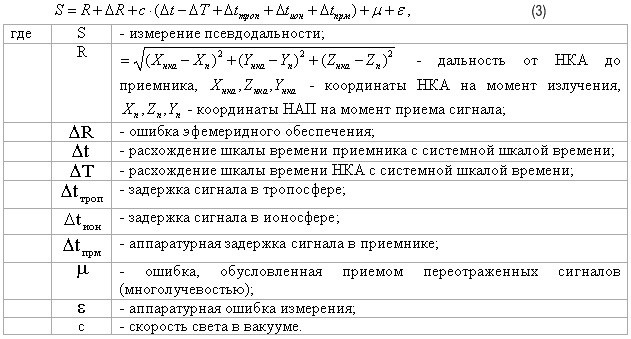
Однако и формула (2) также является
идеализированным выражением для
формируемого в НАП отсчета псевдодальности,
т.к. не учитывает расхождение БШВ
отдельных НКА от ШВ системы, задержки
радиосигнала на трассе распространения,
а также аппаратурные ошибки в приемном
устройстве. В самом общем виде формируемый
навигационным приемником отчет
псевдодальности можно описать следующей
моделью измерений:
.
Поверхностью положения по-прежнему
является сфера с центром в точке центра
масс НКА, но радиус этой сферы отличается
от истинной дальности R
на неизвестную величину δR
. Шкалы времени НКА синхронизированы с
высокой точностью, величина задержки
δR
= cτn
считается
одинаковой для всех НКА.
Измерение
псевдодальностей до трех НКА приводит
к системе трех уравнений, содержащих
четыре неизвестных – координаты
потребителя x,
y, z
и задержку δR.
Для устранения возникшей неопределенности
необходимо провести дополнительное
измерение, т. е. измерить псевдодальность
до четвертого спутника. Именно
необходимость нахождения в зоне видимости
четырех НКА в значительной степени
определяет структуру и параметры
орбитальной группировки НКА.
Псевдодальномерный метод не накладывает
жестких ограничений на значение
погрешности временной шкалы потребителя,
поскольку позволяет одновременно с
определением местоположения вычислять
вычислить эту погрешность и, при
необходимости, скорректировать ее.
Однако и формула (2) также является
идеализированным выражением для
формируемого в НАП отсчета псевдодальности,
т.к. не учитывает расхождение БШВ
отдельных НКА от ШВ системы, задержки
радиосигнала на трассе распространения,
а также аппаратурные ошибки в приемном
устройстве. В самом общем виде формируемый
навигационным приемником отчет
псевдодальности можно описать следующей
моделью измерений: