

1.Основные методы радиолокации. Импульсный метод измерения дальности. Определение направления на объект.
Радиолокацией называется обнаружение с помощью электромагнитных колебаний различных объектов (целей), определение координат и параметров их движения.
Радиолокационные объекты могут быть точечными и протяженными. Радиолокационное изображение на экране индикатора РЛС точечных целей (объектов) имеет одинаковые размеры и форму(буй веха судно(на большом расстоянии)). А протяженного объекта –радиолокационное изображение практически повторяет в соответствующем масштабе форму и размеры этих объектов.
В зависимости от того, каким образом поступает в приемник РЛС радиоволна от цели, существует Пассивная и активная радиолокация.РЛС пассивного действия состоит из
высокочувствительной остронаправленной приемной антенны, приемника и индикатора.Такого типа РЛС используется для приема сигналов, создаваемых тепловым радиоизлучением.
Активная радиолокация может быть с пассивным ответом (первичная радиолокация) или с активным ответом (вторичная радиолокация). Активная РЛС с активным ответом отличается от активной РЛС с пассивным ответом наличием на объекте или на заранее обусловленном пункте радиолокационного передатчика (ответчика), который отвечает на сигналы «запрашивающей» РЛС.
В зависимости от структуры излучаемых (зондирующих) радиолокационных сигналов различают РЛС непрерывного излученияколебаний и импульсные. (На судах гражданского флота, в подавляющем большинстве, применяются импульсные НРЛС).
Импульсная
НРЛС периодически излучает через
антенный переключатель с помощью антенны
кратковременные радиоимпульсы (как
правило, сверхвысокочастотные –СВЧ
колебания), а в промежутке между
излучениями этих импульсов отраженные
СВЧ колебания попадают на туже антенну,
затем через антенный переключатель –в
приемник. Усиленные и обработанные
специальным образом отраженные импульсы
воспроизводятся на индикаторе.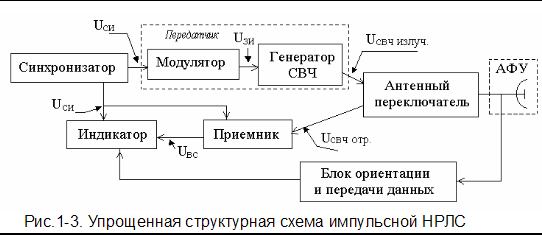
Расстояние до цели определяется по формуле D=Vp*tD/2
где Vp-скорость распространения электромагнитной волны (СВЧ колебаний) в свободном пространстве, tD-время распространения кратковременных радиоимпульсов от антенны до цели и обратно от нее к антенне.
Любая
РЛС позволяет измерять дальности до
объектов и их угловые координаты. В
судовых НРЛС такими координатами
являются курсовые углы (КУ) или
пеленги.Радиокурсовым углом (РКУ),
определяемым на экране РЛС, называется
угол, заключенный между отметкой линии
курса и направлением на объект. РКУ
отсчитывается от отметки линии курса,
находящейся в диаметральной плоскости
судна, и имеет значения 0-180°
левого или правого борта.Направление
на объект также можно определять с
помощью радиолокационногопеленга (РЛП)
представляющего собой угол между
плоскостью географического меридиана
и направлением на объект

2.Основные технические характеристики судовых нрлс.
Технические характеристики обеспечивают выполнение эксплуатационных параметров:К основным относят-
-длина волны ( обычно характеризуется в см);
–частота заполнения зондирующего импульса (СВЧ колебания –чаще всего выражается в МГц);
зи–длительность зондирующего импульса;
Fп–частота следования зондирующих импульсов;
Тп–период повторения (следования) зондирующих импульсов;
Ри–импульсная мощность передатчика;
Рпр.min–чувствительность приемника;
, -направленность антенны соответственно горизонтальной и
вертикальной плоскости (обычно измеряется в градусах)
Длина волны выбирается из соображений, чтобы НРЛС могла обеспечить:
-обнаружение как больших, так и малых надводных и наземных объектов в заданном радиусе действия НРЛС;
-работу НРЛС импульсами малой длительности;
-высокую направленность антенны в горизонтальной плоскости.
В настоящее время применяются две длины волны 3.2см(X-band)и 9.8см (S-band)
Длина волны выбирается из соображений, чтобы НРЛС могла обеспечить:
-обнаружение как больших, так и малых надводных и наземных объектов в заданном радиусе действия НРЛС;
-работу НРЛС импульсами малой длительности;
-высокую направленность антенны в горизонтальной плоскости.
В настоящее время применяются две длины волны 3.2см(X-band)и 9.8см (S-band)
Мощность передатчика P оказывает влияние на дальность действия НРЛС.Различают ипульсную (мощность за время длительности зондирующего импульса)и среднюю(средняя мощность за период следования импульсов)
Чувствительность приемника-один из факторов определяющих дальность радиолокационного обнаружения и качество воспроизводимых сигналов НРЛС.
Основным фактором тут является уровень шумов определяется их мощностью.