5 Расчет переходных процессов синтезированной сау
Подготовка данных для расчета на ЦВМ
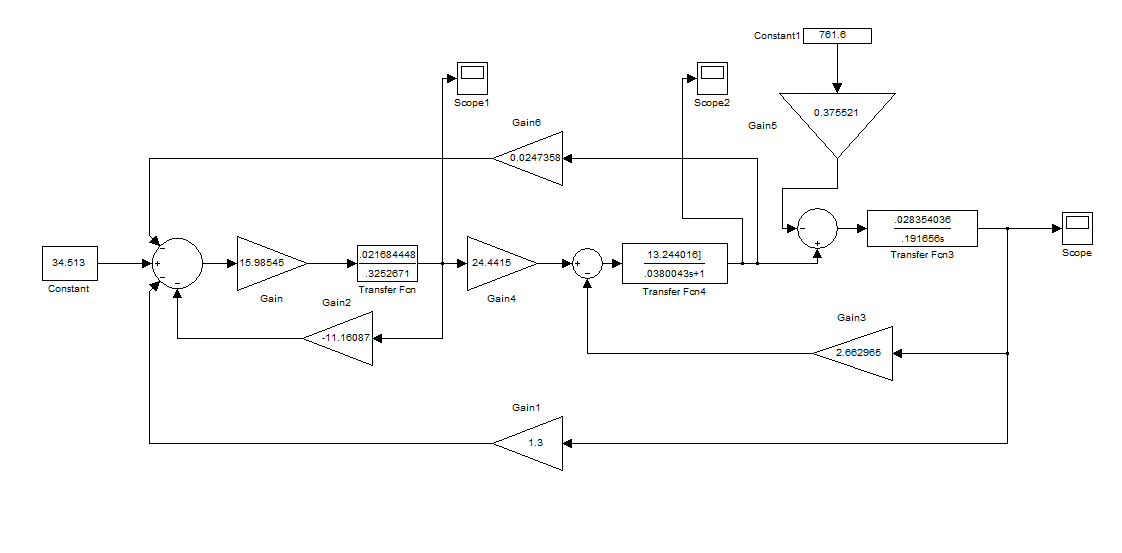
Расчет переходных процессов в замкнутой системе (рисунок 1.1) выполним на ЦВМ на базе стандартного программного пакета MATLAB, позволяющего исследовать динамику САУ путем цифрового моделирования ее структурной схемы.
Предварительно вычислим значения внешних сигналов uВХ и MC , соответствующие указанным в задании динамическим режимам (первый режим – регулирование по управлению (разгон двигателя на холостом ходу), второй режим – управление по возмущению (наброс номинальной нагрузки МСН )).
Для первого режима
(регулирование по управлению) – разгона
двигателя до скорости холостого хода
![]() согласно (2.6) при MC
=
0
имеем:
согласно (2.6) при MC
=
0
имеем:
uВХ = / ku (3.1)
При этом величина ku вычисляется по формуле (2.7):
 7,262486
7,262486
uВХ = / ku = 0,079022
Для второго режима (регулирование по возмущению) – режима наброса номинальной нагрузки вычисляем величину
MC = MCН = kM IДН (3.2)
MC = MCН = kM IДН = 103,508436 Н∙м
Интегрирование
для первого режима (регулирование по
управлению) выполняем при нулевых
начальных значениях
![]() =IЯ
(0)
= IВГ
(0)
и
=IЯ
(0)
= IВГ
(0)
и
MC =0.
Интегрирование для второго режима (регулирование по возмущению) выполняем при нулевых начальных значениях =IЯ (0) = IВГ (0) и
uВХ = 0, а Мс ≠ 0
Список использованных источников
Н.В. Кухаренко Теория управления: Методические указания к выполнению курсовой работы. – Спб.: Изд-во СЗТУ, 2002.
Теория автоматического управления / под ред. А.А. Воронова Ч.1 М.:Высшая школа,1986.
Лазарева Т.Я., Мартемьянов Ю.Ф. Основы теории автоматического управления. Учебное пособие.- Тамбов: Изд-во ТГТУ, 2004.-352 с.
Приложение расчет и анализ графиков переходных процессов
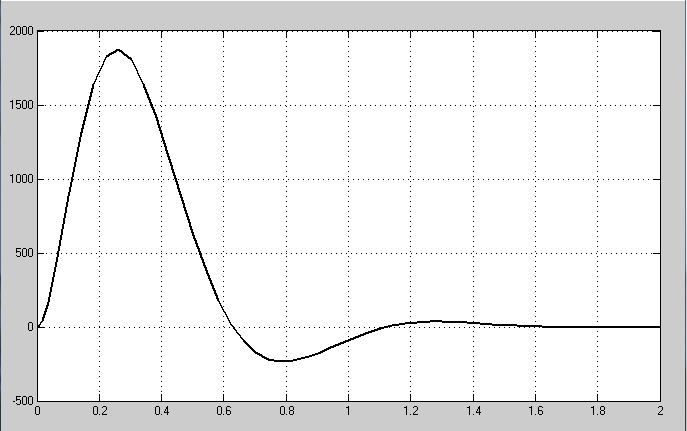
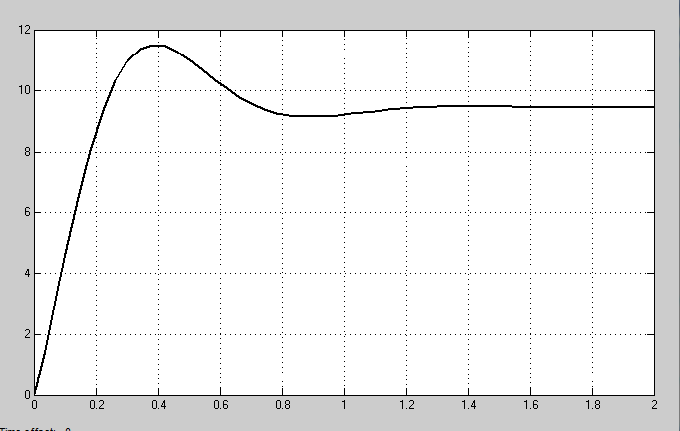
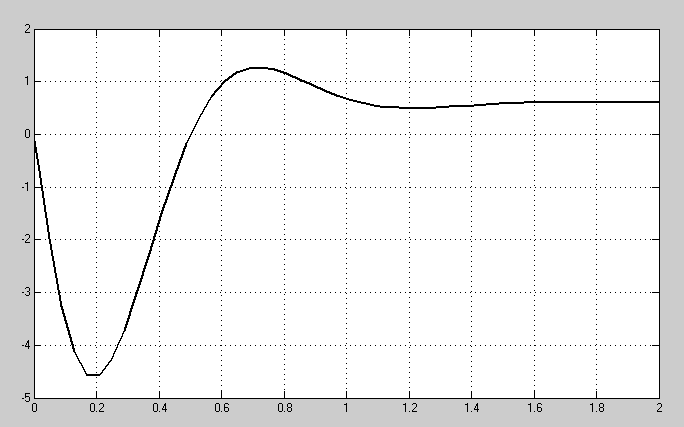
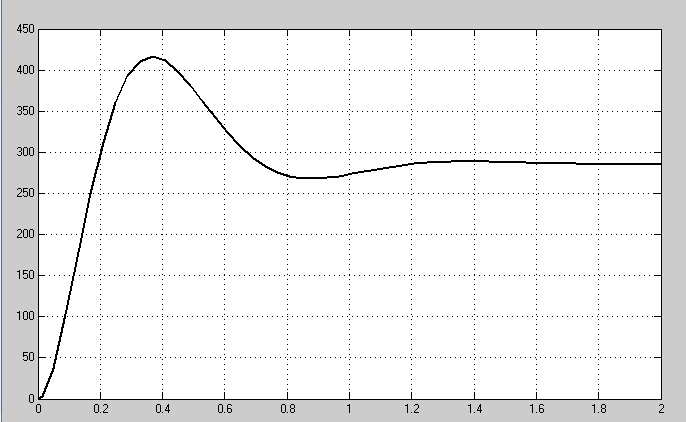
Регулирование по управлению (разгон двигателя на холостом ходу)
Частота вращения:

Ток якоря:
Ток обмотки возбуждения:
Управление по возмущению (наброс номинальной нагрузки мсн )
Частота вращения:
2.2. Ток якоря:
Ток обмотки возбуждения

Структурная схема.