

12.3. Матричное описание цепей свч
При построении математических моделей сложных цепей СВЧ обычно используют характеристические матрицы. Достаточно общую конструкцию произвольной цепи СВЧ можно представить в виде сочленения, образованного N линиями передачи, которые могут быть как одного, так и разных типов. На рис. 12.26 показано такое устройство, содержащее четыре подводящих линии (N=4). Линии передачи используются либо для подвода энергии от генератора к устройству, либо для подключения к нему внешних оконечных устройств (полезных нагрузок, поглощающих нагрузок, короткозамыкающих поршней и т.д.). Для построения математической модели рассматриваемого сочленения в каждой подводящей линии выбираем поперечное сечение, расположенное на некотором расстоянии от места сочленения. Проводим через эти сечения плоскости Т1,Т2.....TN (рис.12.26), которые в дальнейшем будем называть плоскостями отсчета фаз элементов характеристических матриц. Предположим, что расстояние от плоскостей отсчета до сочленения выбрано так, что в этих плоскостях можно пренебречь амплитудами нераспространяющихся волн, которые могут возникать в месте сочленения линий. Рассмотрим устройство, образовавшееся между плоскостями отсчета. Оно имеет N плеч, образованных отрезками линий передачи. Причем каждый свободный конец этих отрезков линии служит или входом, через который энергия вводится в устройство, или выходом, через который энергия выводится из него. Поскольку каждый отрезок линии может быть представлен отрезком эквивалентной линии, имеющей два входных зажима (полюса) на входе, то рассматриваемое устройство возможно представить эквивалентным многополюсником (рис.12.27). Причем если в каждом из N плеч устройства распространяется лишь один невырожденный тип волны, то эквивалентный многополюсник имеет 2N полюсов, обоз-

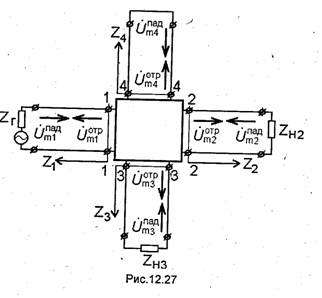
начаемых 1-1,2-2, ...,N-N. Рассмотрим случай, когда в одном или в нескольких плечах устройства будут распространяться несколько типов волн, т.е. линия, образующая такое плечо, работает в многоволновом режиме, или линия работает в одноволновом режиме, но по ней распространяются вырожденные волны (например, распространяющаяся по круглому волноводу волна H11 с круговой поляризацией вектора Е в центре волновода может быть представлена суммой двух вырожденных распространяющихся волн H11 с линейными взаимно перпендикулярными поляризациями векторов Е). При этом каждое плечо, в котором может распространяться несколько типов волн, следует представить в эквивалентном многополюснике несколькими входами или выходами по числу распространяющихся волн в плече; при этом многополюсник будет иметь 2n полюсов, где п >N.
Заменив линии передачи эквивалентными линиями, а генераторы, оконечные нагрузки, короткозамыкающие поршни их эквивалентными представлениями, получаем для рассматриваемого устройства (рис. 12.26) эквивалентную схему (рис. 12.27), при этом в каждой эквивалентной линии могут распространяться соответствующие падающие и отраженные волны напряжений (токов). Поскольку мощность, переносимая волной напряжения (тока) по эквивалентной линии, зависит не только от амплитуды напряжения (тока) волны, но и от волнового сопротивления линии (12.2), обычно при рассмотрении свойств многополюсника, ко входам которого могут подключаться линии с разными значениями волнового сопротивления, вводят нормированные напряжение u(z) и ток i(z), распространяющиеся в каждой эквивалентной линии и связанные с напряжением Um(z) и током im(z) с формулами
![]()
где ZB - волновое сопротивление эквивалентной линии.
Величины u(z) и i(z) имеют одинаковую размерность √Вт, поэтому нормированное волновое сопротивление zB эквивалентной линии, в которой распространяются нормированные напряжение и ток, будет безразмерной величиной, равной 1:

Введем в каждой линии передачи (см. рис. 12.26) соответствующую систему координат так, чтобы продольная ось была направлена от сочленения, а ее начало было расположено в плоскости отсчета фаз рассматриваемой линии. При этом начало
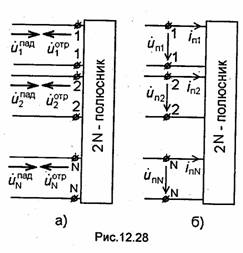
отсчета продольных осей Z1Z2.....ZN в эквивалентной схеме (рис.12.27) совмещено с соответствующими полюсами 1-1,2-2, ...,N-N. Будем называть волны, распространяющиеся в плечах в сторону многополюсника, падающими, а волны, распространяющиеся от многополюсника,-отраженными. Пусть генератор создает в линии 1, подключенной к плечу 1 многополюсника, падающую волну напряжения..Эта волна, дойдя до сочленения, будет частично отражаться, вызывая в линии 1 отраженную волну, а частично, пройдя через многополюсник, поступит на выходы остальных плеч, вызывая в подключенных к ним линиях отраженные волны напряжений. Эти волны, в свою очередь, распространяясь по линиям, подключенным к плечам 2, 3,..., N многополюсника, будут в общем случае частично поступать в оконечные нагрузки, а частично отражаться от них, вызывая в линиях падающие волны напряжения. В свою очередь, падающие волны в линиях, подключенных к плечам 2, 3.....N, будут на входах многополюсника частично отражаться от сочленения, а частично проходить через него, вызывая отраженные волны в линиях, подключенных к плечам многополюсника, и т.д. Таким образом, в каждой плоскости отсчета устройства (см. рис.12.26) или на входах каждой пары полюсов в эквивалентной схеме (см. рис.12.27) будут действовать падающая и отраженная волны, которые будем характеризовать нормированными функциями иjпад и uj°тр, где j=1, 2, ...,N(рис.12.28,а). Каждая из указанных волн представляет
собой
суперпозицию волн, созданных как
непосредственно генератором, так и
оконечными нагрузками линий, подключенных
к выходам устройства. Согласно (12.9)
и (12.10) в плоскостях отсчета или на
полюсах многополюсника можно ввести
полные нормированные напряжения
uп1,
uп2,
...,
unN
и
токи
![]() (рис.
12.28, б).
(рис.
12.28, б).
В общем случае режим работы каждого входа многополюсника можно описать с
помощью двух комплексных величин, например, для j-го входа это могут быть или
![]() Поэтому
можно ввести несколько различных
описаний многополюсника, считая в
каждой выбранной паре одну из величин
независимой, а вторую зависимой.
Наибольшее применение в технике СВЧ
при описании свойств многополюсников
нашла волновая матрица рассеяния || S
||, устанавливающая связь между
нормированными напряжениями отраженных
и падающих волн во всех плоскостях
отсчета устройства или на всех полюсах
его эквивалентной схемы.
Поэтому
можно ввести несколько различных
описаний многополюсника, считая в
каждой выбранной паре одну из величин
независимой, а вторую зависимой.
Наибольшее применение в технике СВЧ
при описании свойств многополюсников
нашла волновая матрица рассеяния || S
||, устанавливающая связь между
нормированными напряжениями отраженных
и падающих волн во всех плоскостях
отсчета устройства или на всех полюсах
его эквивалентной схемы.
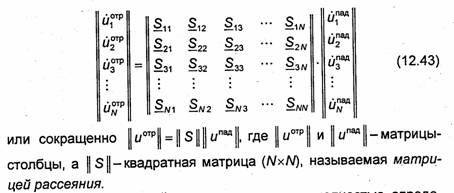
Если рассматриваемое N-плечное устройство является пассивным и линейным (содержит лишь линейные среды), то в силу линейности уравнений Максвелла нормированное напряжение отраженной волны uj°тр в плоскости отсчета j-го плеча (на полюсах j-j многополюсника) можно рассматривать как суперпозицию волн, образовавшихся под воздействием падающих волн в плоскостях отсчета всех плеч устройства (на всех полюсах многополюсника при n = N):
![]()
где
![]() безразмерные
комплексные величины, не зависящие
от нормированных напряжений падающих
и отраженных волн. Систему из N
уравнений
(12.42), устанавливающую связь между
напряжениями падающих и отраженных
волн на входах многополюсника, удобно
записать в матричном виде:
безразмерные
комплексные величины, не зависящие
от нормированных напряжений падающих
и отраженных волн. Систему из N
уравнений
(12.42), устанавливающую связь между
напряжениями падающих и отраженных
волн на входах многополюсника, удобно
записать в матричном виде:
Передаточные свойства многополюсника полностью определены, если известна его матрица ||S ||, записанная для выбранной системы плоскостей отсчета в каждом плече на заданной частоте. Вид матрицы не зависит от подключаемых к многополюснику устройств. Определиим физический смысл элементов Sjq матрицы рассеяния. Для этого рассмотрим частный случай работы многополюсника (рис.12.28, а): пусть к полюсам j-j подключен генератор, а к полюсам всех остальных плеч подключены сог-

Sqj-коэффициент передачи по нормированному напряжению от полюсов j-j к полюсам q-q многополюсника (от плоскости отсчета в плече q к плоскости отсчета в плече q устройства) при заданных выше условиях.
Рассмотренная
выше матрица рассеяния называется
нормированной,
поскольку
она устанавливает связь между
нормированными напряжениями. Иногда
вводят [33] ненормированную матрицу ||
S||,
связывающую ненормированные напряжения
отраженных и падающих волн в плоскостях
отсчета каждой линии. В дальнейшем будут
рассматриваться лишь нормированные
матрицы. Для таких матриц согласно
(12.44) и (12.41)
![]()
![]() что
совпадает с
что
совпадает с
коэффициентом передачи по мощности из плеча j в плечо q устройства при условии, что мощность (Pjпад)Cp подается на вход плеча j ,а во всех остальных плечах падающие волны отсутствуют. Поэтому для всех элементов матрицы рессеяния выполняется условие | Sqj| ≤1. Для ненормированной матрицы величина | Sqj |зависит не только от отношения мощностей (Pqотp)cp и(Рjпад)ср, но и от волновых сопротивлений линий, подключенных к полюсам j-j и q-q многополюсника.
Кроме матрицы ||s|| в технике СВЧ используют матрицу * сопротивлений и матрицу проводимостей. Матрица сопротивлений ||z|| устанавливает связь между полными нормированными напряжениями и токами на всех входах многополюсника (см. рис. 12.28, б):

Последнее соотношение напоминает описание цепи с помощью матрицы сопротивлений в классической теории цепей [28]. Это позволяет с заданным многополюсником сопоставить некоторую цепь, называемую эквивалентной схемой, имеющую такую же матрицу сопротивлений. Следует отметить, что переход от многополюсника к эквивалентной схеме неоднозначен, так как имеется множество схем с одинаковыми матрицами сопротивлений. Эквивалентность между многополюсником и цепью, строго говоря, существует только на одной частоте, однако в некотором приближении можно рассматривать и узкую полосу частот вблизи этой частоты. Матрица проводимостей ||Y|| устанавливает связь между полными нормированными токами и напряжениями на всех входах многополюсника (рис. 12.28, б):
![]()
где j = 1,2,'...,N, или сокращенно || iп || = || У || • || ип ||. Хотя по аналогии с низкочастотными цепями можно определить физический смысл элементов матриц || Z|| и || У||, как сделано в [16], однако в общем случае в диапазоне СВЧ элементы этих матриц имеют формальный смысл, поскольку формальный смысл имеют и нормированные напряжения и токи в произвольной линии передачи. Напротив, элементы матрицы ||S|| имеют выясненный выше физический смысл в любом случае.
Матрицы ||Z|| и || У|| обычно более удобны при анализе последовательного или параллельного соединения многополюсников
[33]. Используя (12.9) и (12.10), легко установить связь между матрицами [34]:

где ||/|| -единичная квадратная матрица порядка N, а (|| Z|| +||/||)-1-матрица, обратная матрице (|| Z|| + || /|).
Изменение положения плоскостей отсчета в плечах многополюсника. Характеристические матрицы многополюсника определяются для выбранного заранее положения плоскостей отсчета в каждом плече Т1Т2, ...,TN (см. рис.12.26). На практике очень часто при экспериментальном определении элементов матриц многоплечных устройств бывает затруднительно, а иногда и невозможно измерить те или иные величины в поперечных сечениях линий, где расположены плоскости отсчета. Как правило, между измерительной аппаратурой и поперечным сечением, где расположена плоскость отсчета, оказывается включенным дополнительный отрезок линии передачи. Из-за этого измеренные величины относятся к новым плоскостям отсчета, сдвинутым в ту или иную сторону вдоль линии передачи относительно старых плоскостей отсчета. Поэтому возникает необходимость преобразования известной матрицы устройства относительно введенных новых плоскостей отсчета. Наиболее просто такое преобразование выполняется для элементов матрицы || S ||. Пусть в каждом плече j (j = 1,2.....N) на расстоянии ∆zj, от старой плоскости отсчета Тj) (см. рис. 12.26) введена новая плоскость отсчета Tj, причем при ∆zj>0 новая плоскость расположена дальше от сочленения, а при ∆zj<0-ближе к сочленению относительно старой плоскости. Матрицу рассеяния устройства относительно новых плоскостей

Отсюда следует, что при смещении плоскостей отсчета изменяются аргументы элементов матрицы ||S ||из-за изменения
путей, проходимых падающими и отраженными волнами в плече устройства. Кроме того, из-за наличия затухания в линиях передачи изменяются и модули элементов матрицы. При малых ∆Zj можно пренебречь потерями в отрезках линий (αj≈0) в этом случае смещение плоскостей отсчета в плечах устройства приводит лишь к изменению аргументов элементов матрицы || S ||.
Основные свойства характеристических матриц. 1. Пассивный многополюсник, выполненный на основе изотропных материалов, является взаимным; в этом случае Sjq = Sqj для любых jи q. Для такого многополюсника матрица || S || будет симметрической, т.е. ||S| |= ||S|T, где || S||т-транспонированная матрица |S||. Матрицы ||Z|| и || У ||также будут симметрическими. Многополюсник, содержащий анизотропный материал (например, намагниченный постоянным магнитным полем феррит), является невзаимным, его характеристические матрицы не будут симметрическими (Sjq ≠SqJ).
2. Матрица рассеяния || S || многополюсника без потерь (с изотропным или анизотропным заполнением) является унитарной, для нее справедливо || S* ||т • || S || = || /1||, где || S* ||т - комплексно-сопряженная транспонированная матрица || S ||; это равенство является следствием закона сохранения энергии. Действительно, на его основе можно записать

Элементы матриц ||Z|| и || У|| для многополюсника без потерь
будут чисто мнимыми величинами. Более подробно с характе-, ристическими матрицами можно ознакомиться в [32, .33].