

Лабораторная работа №6 Экспериментальное определение статических и динамических характеристик объекта управления
Цель работы: освоить методику экспериментального определения статической и переходной характеристик исследуемого объекта, его основных свойств, а также методику получения частотных характеристик графоаналитическим способом по переходной характеристике объекта.
Программа работы
1. Ознакомиться с методикой экспериментального определения статических и переходных характеристик объектов управления, а также с лабораторной установкой, предназначенной для этого. Изучить функциональную схему установки и составить её принципиальную электрическую схему.
2. Экспериментально снять статическую характеристику объекта Θ=f(I), изменяя для этого ток нагревателя ступенями, выставляя его от 0 до 4,5 А с шагом по 0,5 А.
3. Согласно изложенной в настоящих указаниях методике, снять переходную характеристику объекта Θ=f(t) при I=4,5 А по одному или двум каналам управления.
4. Используя полученную экспериментальную переходную характеристику найти передаточную функцию объекта, а также определить основные его параметры: передаточный коэффициент (kо), постоянную времени (Т), время разгона (Tp), время чистого (τо) и емкостного запаздывания (τе), коэффициенты емкости (с) и самовыравнивания (ρ).
5. Используя экспериментальную переходную характеристику найти частотные характеристики объекта графоаналитическим методом согласно выражениям (4.13…4.16) и построить АЧХ, ФЧХ и АФЧХ, задаваясь изменением ω от 0 до + ∞.
6. Составить отчет о выполненной работе.
Отчёт по работе должен содержать
1) Структурную схему CAP и принципиальную электрическую схему установки.
2) Статическую характеристику Θ=f(I) исследуемого объекта.
3) График переходной характеристики Θ=f(t) с необходимыми дополнительными построениями для определения параметров и характеристик исследуемого объекта.
4) Частотные характеристики АЧХ, ФЧХ и АФЧХ исследуемого объекта.
5) Промежуточные и окончательные результаты расчетов параметров и характеристик объекта, а также расчётные таблицы для построения АФЧХ, АЧХ и ФЧХ.
Основные положения и методические указания
Объект управления (ОУ) – устройство (или совокупность устройств), осуществляющее технологический процесс, который нуждается в оказании специально организованных воздействий извне для выполнения его алгоритма функционирования.
Регулируемым параметром (управляемой величиной) называется какая–либо физическая величина (температура, уровень, давление и т.п.), постоянное значение которой, должно поддерживаться неизменным в ОУ или изменяться по заранее предписанному закону. Регулирующим воздействием (управляющей величиной) называется воздействие на ОУ со стороны автоматического управляющего устройства (автоматического регулятора) с целью поддержания в ОУ алгоритма функционирования.
К числу наиболее часто встречающихся объектов управления в сельскохозяйственном производстве относятся различные тепловые устройства и помещения с установками искусственного микроклимата (электроводонагреватели, калориферные установки, холодильные установки, электропечи, птичники, теплицы и т.д.).
Свойства ОУ в большей степени влияют на устойчивость и показатели качества работы автоматической системы, оказывают существенное влияние на весь процесс управления и предъявляют определенные требования к автоматическому управляющему устройству (автоматическому регулятору). Поэтому для создания качественно работающей автоматической системы необходимо знать статические и динамические свойства ОУ. Эти свойства определяются путем изучения поведения ОУ в установившихся и неустановившихся состояниях.
Установившееся (статическое) состояние объекта возможно лишь при равенстве прихода в объект вещества или энергии и их расхода. В этом случае регулируемый параметр не изменяется во времени. Установившееся состояние объекта при различных значениях регулируемого параметра отражает статическая характеристика. Статические характеристики устанавливают связь между параметрами, характеризующими объект в его установившемся состоянии, и обычно описываются алгебраически или графически.
Статическая характеристика ОУ – зависимость регулируемого параметра (y) от положения регулирующего органа в установившемся состоянии. Статическую характеристику целесообразно находить только для устойчивых объектов, обладающих положительным самовыравниванием.
Устойчивый ОУ – объект, обладающий способностью приходить в равновесное состояние после изменения входной величины без вмешательства извне.
Аналитическое определение статической характеристики заключается в составлении уравнения материального или энергетического баланса ОУ для установившихся состояний, и затем в отыскании в нем неизвестных величин и нахождения по нему зависимости между выходной у и входной величинами х исследуемого объекта.
Экспериментальное определение статической характеристики ОУ заключается в последовательном создании нескольких равновесных состояний объекта при различных значениях входной и выходной величин. Из одного равновесного состояния в другое объект переводят путем изменения входного воздействия. По истечении достаточного промежутка времени после изменения входной величины в объекте самостоятельно устанавливается равновесное состояние. По полученным значениям входной и выходной величин объекта для нескольких равновесных состояний строят график статической характеристики.
Время разгона ОУ (Tр) – время от момента подачи возмущения до момента, когда управляемый параметр достигнет своего установившегося значения (практически 99 % от установившегося значения – см. рис.6.1).
Скорость разгона ОУ (чувствительность объекта к возмущениям) определяется отношением скорости изменения выходной величины Θ к изменению входной величины q (при единичном скачкообразном изменении входной величины ∆q)
![]() (6.1)
(6.1)
На рис. 6.1 представлены переходные характеристики (кривые разгона) одно-емкостного объекта с самовыравниванием без запаздывания (кривая 1) и много емкостного объекта с самовыравниванием и запаздыванием (кривая 2).
Кривая разгона для одно-емкостных объектов представляет собой экспоненту, характеризующуюся тем свойством, что касательные, проведённые из любой её точки, отсекают на линии, соответствующей новому установившемуся значению управляемого параметра, одинаковые отрезки времени, представляющие собой в данном случае постоянные времени объекта Т.
Постоянная времени объекта – это время, в течение которого управляемый параметр объекта в случае скачкообразного возмущения достигнет нового равновесного возмущения достигнет нового равновесного состояния при условии, что параметр изменяется с постоянной скоростью, равной скорости в момент приложения возмущения.
Для одно-емкостного объекта между временем разгона Tp , постоянной времени объекта Т, скоростью разгона ε и коэффициентом самовыравнивания ρ существуют следующие зависимости:
![]() (6.2
а, б, в)
(6.2
а, б, в)
Самовыравнивание ОУ – свойство устойчивого объекта приходить в равновесное состояние после ступенчатого изменения входной величины без вмешательства извне. Количественно самовыравнивание объекта определяет коэффициент самовыравнивания.
![]() , (6.3)
, (6.3)
где q – входная величина в относительных единицах; Θ – управляемая величина в относительных единицах
Передаточный коэффициент ОУ можно определить из выражения (6.3)
![]() (6.4)
(6.4)

Рис. 6.1. Переходные характеристики: 1 – одно-емкостного ОУ без запаздывания; 2 – много-емкостного ОУ с чистым и ёмкостным запаздыванием.
Аккумулирующая способность ОУ – свойство объекта накапливать энергию или вещество, количественно определяется коэффициентом ёмкости
![]() , (6.5)
, (6.5)
где ∆Q – изменение количества вещества или энергии в объекте вследствие неравенства потоков на входе и выходе, которое приводит к изменению управляемого параметра на величину ∆Θ за время ∆t.
В частных случаях в объектах накапливается тепло, жидкость, газ и пр. Объект регулирования обладает определённой ёмкостью лишь при наличии сопротивления на выходе из объекта энергии или вещества.
Величина ёмкости определяется размерами объекта, свойствами материалов, из которых он изготовлен, и свойствами энергии или вещества. Чем больше коэффициент параметра при одном и том же изменении входной величины, и наоборот.
По числу ёмкостей объекты регулирования делятся на одно-емкостные и много-емкостные. К первым относятся резервуары с регулируемым уровнем воды, камера смешения воздуха, участки трубопроводов, отдельные конструктивные устройства и др. Объекты регулирования с несколькими ёмкостями, участвующими в процессе регулирования и разделёнными между собой сопротивлениями, являются много емкостными. Такими объектами являются калориферы, поверхностные охладители и др. Теплообменники с известным приближением можно считать двух емкостными объектами.
При нанесении возмущающего воздействия управляемый параметр изменяется не мгновенно, а с некоторым запаздыванием во времени. Оценку запаздывания определяют по времени чистого (передаточного, транспортного, дистанционного) запаздывания τо, ёмкостного (переходного) запаздывания τе и полного запаздывания τ, которые определяются по временным характеристикам.
Чистое (передаточное) запаздывание ОУ вызвано наличием определённого расстояния между управляющим элементом, вносящим возмущение и чувствительным элементом регулятора, воспринимающим изменение управляемого параметра. Для того чтобы поток вещества или энергии прошёл это расстояние, необходимо некоторое время, называемое временем передаточного запаздывания.
Ёмкостное (переходное) запаздывание (для много емкостных объектов) обусловлено наличием тепловых, гидравлических и других сопротивлений между ёмкостями, что вызывает замедление перехода энергии или вещества из одной ёмкости в другую. Время полного запаздывания равно сумме времени чистого запаздывания и времени ёмкостного запаздывания.
Описание установки. Для экспериментального определения переходной и статической характеристик используется установка с двух емкостным тепловым объектом, обладающая положительным самовыравниванием. Физическая модель ОУ выполнена в виде трубчатой электрической печи 1 (рис.6.2), внутри которой помещён нагревательный элемент 2 и датчик температуры 3. Текущие значения температуры воздуха на выходе объекта ∆Θ (регулируемый параметр) регистрируется прибором 11. Через печь прогоняется воздух вентилятором 5, приводом от электродвигателя 6.
Входные величины ОУ: изменение количества прогоняемого через объект воздуха, производимое изменением скорости вращения двигателя переключателем 4 и изменением силы тока (мощности) электронагревателя 2, осуществляемое с помощью автотрансформатора 7.
Ток и мощность электронагревателя связаны между собой известной формулой:
![]() , (6.6)
, (6.6)
где U и I – показания вольтметра (8) и амперметра (9); R – сопротивление спирали нагревателя (2).
Методика получения переходной характеристики. Переходные характеристики ОУ должны быть сняты как по каналу управления (от управляющего элемента – автотрансформатора к датчику температуры), так и по каналу возмущения (двигатель, изменение его скорости вращения – датчик температуры).
Эксперимент по снятию переходных характеристик проводится при разомкнутой системе регулирования. До нанесения ступенчатого воздействия систему стабилизируют при режиме работы (0,5…0,7 Iн) и определенном значении выходной величины (обычно выбирают среднее значение выходной величины по шкале регистрирующего прибора). В установившемся состоянии система должна находиться не менее 5…10 мин.
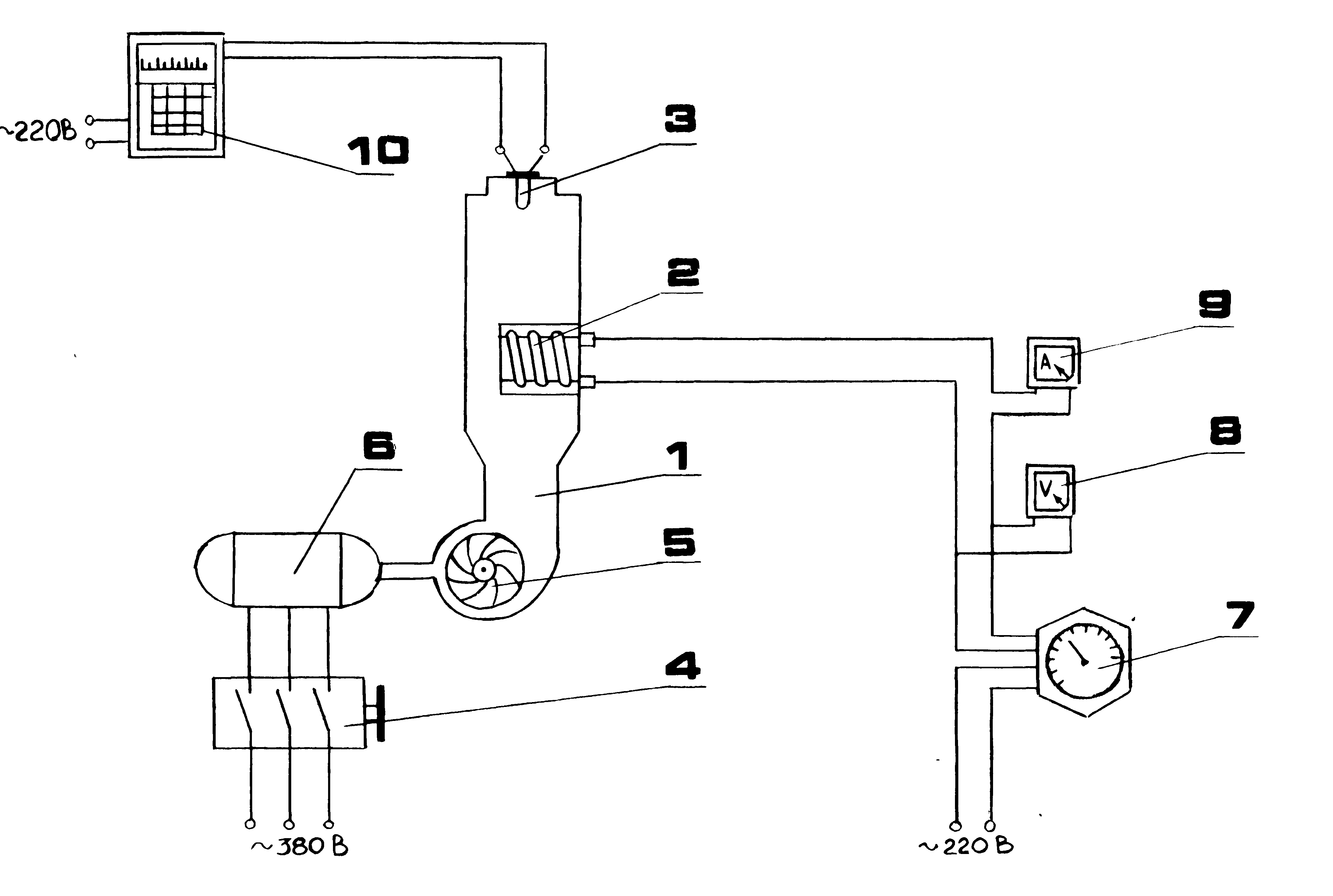
Рис. 6.2. Схема экспериментальной установки для определения статических и динамических характеристик управляемого объекта : 1 – трубчатая электрическая печь (объект управления);2 – нагревательный элемент (ТЭН) ;3 – терморезистор (датчик температуры);4 – переключатель схемы соединения обмоток статора двигателя вентилятора (звезда - треугольник);5, 6 – вентилятор с электроприводом;7 – автотрансформатор;8, 9 – вольтметр и амперметр;10– регистратор температуры.
Затем объекту мгновенно наносится скачкообразное возмущение (например, устанавливают 1,0·Iн), величина которого должна составлять не менее 10% от нормального режима работы объекта, но не должна выходить за границы линейного участка статической характеристики. В зависимости от того, по какому каналу снимается характеристика, ступенчатое входное воздействие наносится перестановкой переключателя 4 или движка автотрансформатора 7 (рис. 6.2). Во время процесса изменение температуры на выходе ОУ фиксируется автоматическим регистратором температуры 10. При отсутствии самопишущего прибора следует записывать показания имеющегося прибора через определенные интервалы времени, контролируемые секундомером. Вначале эти интервалы должны быть короткими – 5 секунд, а с уменьшением скорости изменения выходной величины их можно увеличить до минуты.
По протоколу опыта строят кривую разгона на миллиметровой бумаге в достаточно крупном масштабе, чтобы можно было более точно определить время чистого и емкостного запаздывания и постоянную времени объекта.
Методика получения частотных характеристик по переходной характеристике. С достаточной для инженерных расчетов степенью точности частотные характеристики объекта могут быть определены по экспериментально снятым временным характеристикам или более точно получены экспериментальным путем. В инженерной практике, в частности для предварительного анализа CAP динамическая характеристика объекта аппроксимируется дифференциальным уравнением первого порядка с запаздывающим аргументом. Порядок определения частотных характеристик графоаналитическим методом по экспериментальным временным характеристикам может быть следующим. Экспериментальная переходная характеристика в соответствии со своим внешним видом (кривая 2 рис.6.1) аппроксимируется переходными характеристиками двух последовательно соединенных звеньев – апериодического и запаздывающего. Аппроксимирующая передаточная функция будет иметь вид:
 , (6.7)
, (6.7)
где постоянная времени То и время запаздывания τD подлежат определению по экспериментальной переходной характеристике.
На кривой разгона (рис.6.3) выбираются две точки Б и В с координатами θб, tб и θв, tв. Желательно, чтобы точка Б была расположена около точки перегиба А (рис.6.3), а ордината θв равнялась 0,8…0,9. Аппроксимирующая кривая будет пересекать экспериментальную характеристику в начале координат, точках А и Б и в принципе в бесконечности; этим обеспечивается приемлемая точность описания динамических свойств объекта передаточной функцией вида (6.7).