

Контрольные вопросы
1. Назначение сельсинных командоаппаратов, сельсинных измерительных устройств.
2. Конструкция сельсинов.
3. Как уменьшить нелинейность зависимости обмотки сельсина.
4. Схема синхронной передачи измерительного устройства.
5. Трансформаторная схема измерительного устройства.
6. Режимы работы сельсинов.
7. Входная и выходная координата сельсина.
Лабораторная работа №2
Узел суммирования сигналов
задания и обратных связей
Цель работы: Изучение типовых элементов автоматизированного электропривода.
Узел суммирования сигналов задания
и обратных связей.
Во всех главных электроприводах, выполненных по системе Г-Д с тиристорным возбудителем, применяется типовой узел потенциального суммирования сигналов задания и обратных связей, (рис. 5). Сигнал задания uз поступает с входа согласующего усилителя А1 и суммируется с сигналом ОС по скорости uо,с и суммарным сигналом гибкой ОС по току uг,о,т и отсечки по току якоря uт,о .
Тахогенератор BR вращается со скоростью вала двигателя М и при постоянстве своего магнитного потока вырабатывает ЭДС, пропорциональную скорости ω, которая используется в качестве источника сигнала ОС Eо,с= cω, где c – постоянная тахогенератора.
Источником сигнала ОС по току является падение напряжения на участке якорной цепи, включающем дополнительные полюсы L2G и компенсационную обмотку L3G, его зависимость от тока якоря имеет вид:
![]()
Из этого следует, что сигнал u содержит составляющую iяRΔ, пропорциональную току якоря, которая обусловлена падением напряжения на суммарном активном сопротивлении RΔ обмоток L2G и L3G, и составляющую, пропорциональную производной тока якоря TΔd(iяRΔ)/dt, где ТΔ = LΔ/RΔ – электромагнитная постоянная времени, обусловленную наличием индуктивности этих обмоток LΔ. Поскольку для организации отсечки по току требуется только первая составляющая сигнала, а для организации гибкой ОС – только его вторая часть, то в чистом виде полученное напряжение u использовать нельзя.

Рис. 5 Узел суммирования сигналов задания и ОС.
Напряжение u подается на фильтрующую цепь R3C1, которая при отсутствии нагрузки и пренебрежении токами утечки конденсатора C1 обладает свойствами апериодического звена с передаточной функцией:
![]()
Переходя в
![]() к оригиналу (p = d/dt)
и подставляя в него u,
после преобразований получим:
к оригиналу (p = d/dt)
и подставляя в него u,
после преобразований получим:
![]()
из которого следует, что при соблюдении равенства R3C1 = TΔ на выходе фильтрующей цепи будет напряжение, пропорциональное току якоря u Δ = iяRΔ.
В действительности, поскольку сопротивление нагрузки цепи R3 C1, хотя и велико, но не бесконечно, u Δ будет несколько меньше произведения iяRΔ и постоянная времени апериодического звена окажется меньше расчетной R3C1. Эти отклонения реальных значений величин от расчетных компенсируются в процессе наладки электропривода.
Полученное напряжение uΔ подается на вход узла потенциометрической отсечки, состоящего из регулируемых сопротивлений R5, R6, диодов VD7, VD8, резистора R7 и источника постоянного напряжения. Как следует из схемы рис. 1, полярность источника напряжения такова, что он создает на диодах VD7, VD8 запирающие их напряжения, называемые опорными Uon. Уровень Uon настраивается с помощью сопротивлений R5, R6 таким образом, чтобы соблюдалось равенство Uon = RΔIотс, где Iотс – заданный ток отсечки электромеханической характеристики привода. Возможна разная настройка уровней Uon, для диодов VD7 и VD8, что позволяет получить неодинаковые токи отсечки при разной полярности тока якоря.
В тех случаях, когда ток якоря превышает ток отсечки │iя│>Iотс, напряжение │uΔ│ становится больше │Uоп│, один из диодов VD7 или VD8, в зависимости от полярности uΔ, отпирается и под воздействием разности напряжении │uΔ│–│Uоп│начинает пропускать ток с тем или иным знаком через входную цепь (выводы 5 и 6) встроенного в ТП блока потенциальной развязки UR. Напряжение на входе UR равно:
![]() ,
(1)
,
(1)
где RвхUR – входное сопротивление блока UR; R'5(6) – часть регулируемого сопротивления R5 или R6, по которой протекает входной ток UR; 1(Δ)- - единичная функция, равная 1, если │UΔ│>│Uоп│, и равная 0, если │UΔ│<│Uоп│.
Сигнал UвхUR(1) используется в качестве ОС по току с отсечкой (Uто).
Гибкая ОС по току требует дифференцирования напряжения uΔ, для чего оно прикладывается к цепи, состоящей из последовательно включенных конденсатора С2 и сопротивлений R4, RвхUR. Ток через нее может протекать только при изменении питающего напряжения
(duΔ/dt > 0 и, следовательно, diя/dt > 0), пока идет заряд конденсатора С2. При запертом узле потенциометрической отсечки (│iя│<│Iотс│) и пренебрежимо малых токах утечки через этот узел и конденсатор С2 связь между напряжением на входе блока UR и напряжением uвхUR(2) отображается передаточной функцией:
![]() (2)
(2)
Выражение (2) соответствует передаточной функции реального дифференцирующего звена. Перейдя к оригиналу (p=d/dt), после преобразований получим дифференциальное уравнение:
![]() (3)
(3)
из которого следует, что на вход блока потенциальной развязки поступает сигнал, содержащий производную du/dt, который используется в качестве гибкой ОС по току (uг,о,т).
При одновременном действии двух ОС по току на входе UR напряжение приближенно равно сумме:
![]() .
.
Блок UR имеет линейную характеристику вход-выход на ее рабочей части и практически без искажений передает на выход (выводы 1 и 3) поданное на вход напряжение обратных связей по току.
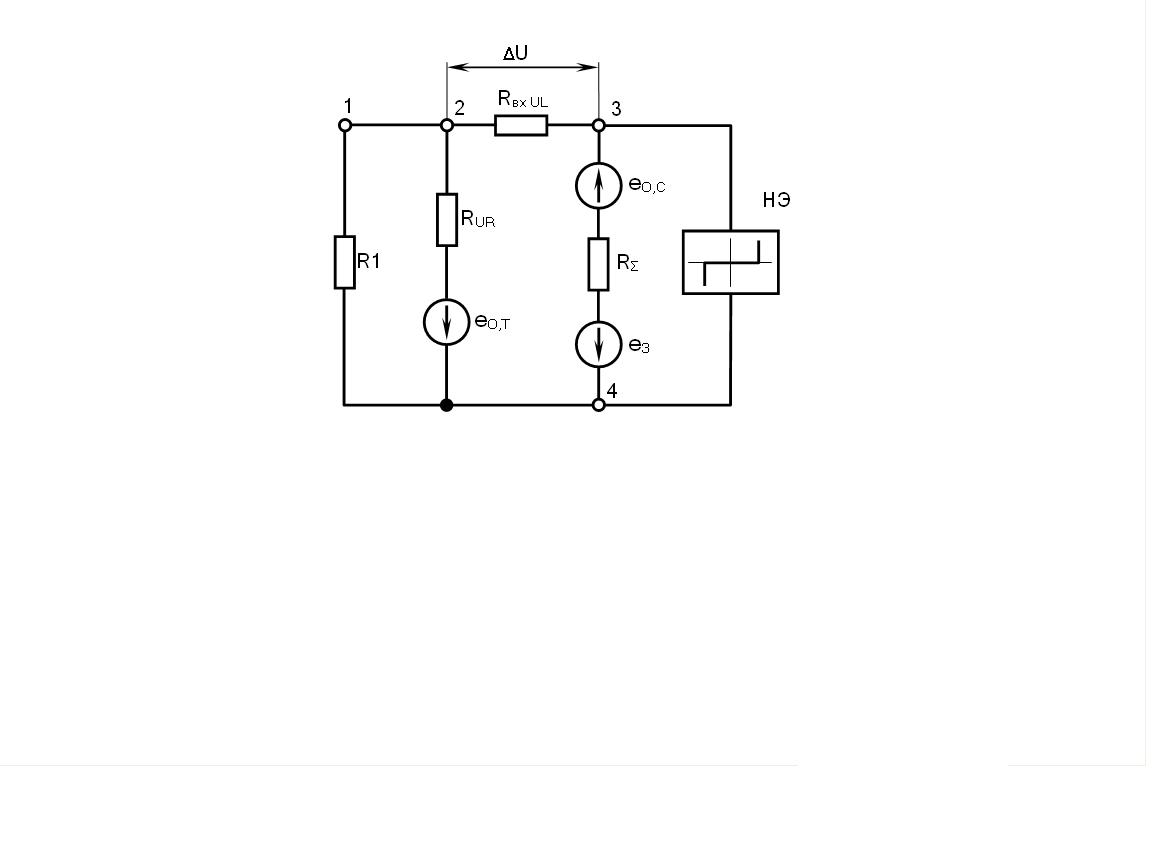
Рис. 6 Схема замещения узла суммирования.
Сигналы задания и ОС можно представить в виде источников напряжений, вырабатывающих пропорциональные этим сигналам ЭДС и имеющих внутренние сопротивления. Принципиальная схема рассматриваемого узла может быть представлена тогда изображенной на рис. 6 схемой замещения. В схеме приняты следующие обозначения: ез , ео,т , ео,с – соответственно ЭДС задания, ОС по току, ОС по скорости; RUR – выходное сопротивление блока UR; RΣ = RBR + RA1 + R2, где RBR и RA1 – соответственно сопротивление якорной цепи тахогенератора BR и выходное сопротивление усилителя A1; RвхUL – входное сопротивление системы управления тиристорным возбудителем UL; НЭ – нелинейный элемент. Нелинейный элемент имеет характеристику вход-выход, соответствующую идеализированному диодному ограничителю VD1—VD6 (см. рис. 5), который пробивается при превышении суммарным напряжением задания и ОС по скорости расчетного максимального значения и стабилизирует это напряжение, пропуская часть тока управления преобразователем UL через себя.
Под результирующим воздействием указанных ЭДС на вход ТП (выводы 2 и 4) подается напряжение управления, равное падению напряжения на сопротивлении RвхUL, которое находится с помощью схемы замещения, например, методом суперпозиции. При отсутствии тока через НЭ оно равно:
![]() (4)
(4)
где
 Выражение (4)
свидетельствует, что на вход тиристорного
возбудителя поступает напряжение Δu,
пропорциональное суммарной погрешности
регулирования скорости ω и тока якоря
iя.
Выражение (4)
свидетельствует, что на вход тиристорного
возбудителя поступает напряжение Δu,
пропорциональное суммарной погрешности
регулирования скорости ω и тока якоря
iя.