

7Суммируемые двоичные счетчики
8Архитектура информационной системы
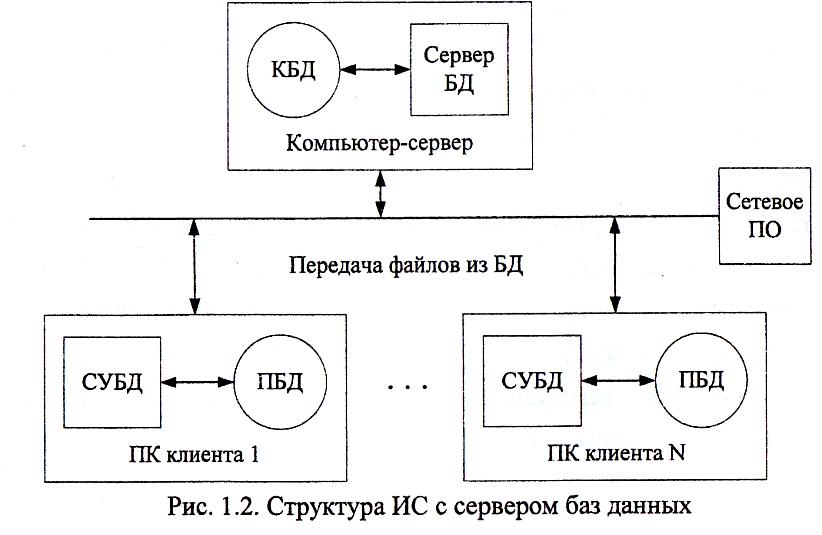
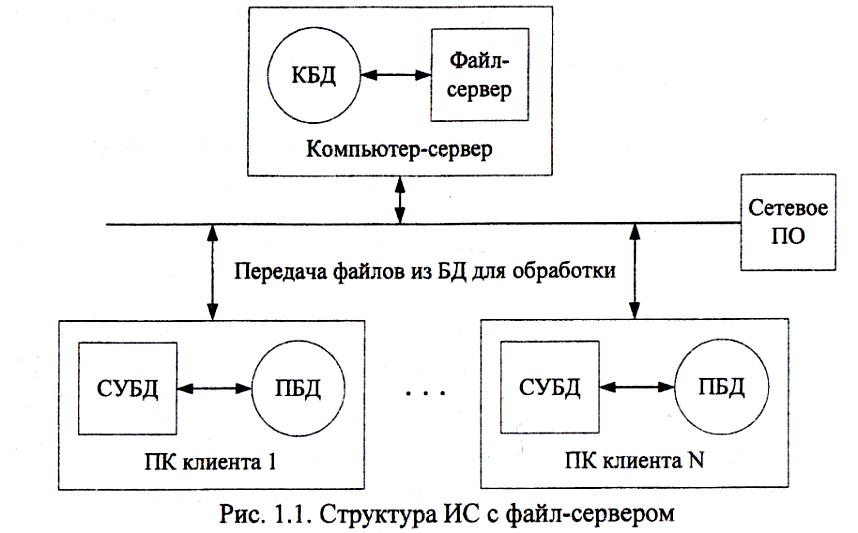
В н.вр наиболее перспек. яв-ся арх-ура клиент-сервер(наличие комп. сети и распределенной БД, включающей корпоративную БД (КБД на компьютере-сервере) и персональные БД (ПБД на компьютерах сотрудников). Сервер -компьютер (программа), упр-щий ресурсом, клиент -компьютер (программа), испо-щий ресурс. Тип сервера опре-тся видом ресурса, которым он управляет. + архитектуры :удачное сочетание централизованного хранения, обслуживания и коллективного доступа к общей корпор-ой инфо с индивид. работой пользователей над персональной инфо. первыми появились распределенные ИС с применением файл-сервера. В таких ИС по запросам пользователей файлы БД передаются на (ПК), где и производится их обработка. Недостаток - высокая интенсивность передачи обрабатываемых данных. Причем зачастую передаются избыточные данные. архитектура клиент-сервер с использованием сервера баз данных- сервер базы данных обеспечивает выполнение основного объема обработки данных. Формируемые пользователем запросы поступают к серверу БД в виде инструкций языка SQL. Сервер БД выполняет поиск и извлечение нужных данных, которые затем передаются на ПК. + -заметно меньший объем передаваемых данных. Разделение общей БД на корпоративную и персональные БД позволяет уменьшить сложность проектирования БД по сравнению с централизованным вариантом и снизить вероятность ошибок при проектировании и его стоимость. Важнейшим + применения БД в информационных системах является обеспечение независимости данных от прикладных программ, которое достигается поддерживаемым СУБД многоуровневым представлением данных в БД на логическом (пользовательском) и физическом уровнях.
8 И-РЕГУЛЯТОР
Регулятор,
реализующий И-закон регулирования
наз-ся интегральным. У И-регулятора
изменение выходной величины и перемещение
регулирующего органа пропорциональы
интегралу от отклонения. Уравнение
динамики И-регулятора имеет вид:
![]() ;
;
![]() – постоянная интегрирования, является
настроечным параметром регулятора. Из
уравнения динамики следует, что скорость
перемещения регулирующего органа
пропорциональна величине рассогласования
. Регулирующий орган будет перемещаться
до тех пор, пока рассогласование (ошибка
регулирования) не станет равной 0.
– постоянная интегрирования, является
настроечным параметром регулятора. Из
уравнения динамики следует, что скорость
перемещения регулирующего органа
пропорциональна величине рассогласования
. Регулирующий орган будет перемещаться
до тех пор, пока рассогласование (ошибка
регулирования) не станет равной 0.
![]() ,
при .
,
при .
Достоинство:
И-регулятор устраняет ошибку системы:
![]() .
.
В
динамическом отношении И-регулятор
представляет собой идеальное интегрирующее
звено с передаточной функцией
![]() .
.

В
случае равенства
![]() движок потенциометр-го датчика
движок потенциометр-го датчика
![]() находится посередине, напряжение
питания якоря = 0. При изменении расхода
жидкости на
находится посередине, напряжение
питания якоря = 0. При изменении расхода
жидкости на
![]() уровень растет, поплавок перемещает
вверх движок датчика. В цепи якоря ДПТ
появляется напряжение U,
двигатель прикрывает задвижку ЗА
и
приток
уровень растет, поплавок перемещает
вверх движок датчика. В цепи якоря ДПТ
появляется напряжение U,
двигатель прикрывает задвижку ЗА
и
приток
![]() уменьшается. В момент
уменьшается. В момент
![]() ,
но т.к.
,
но т.к.
![]() ,
т.е.
,
т.е.
![]() ,
интеграл от рассогласования будет
возрастать, следовательно регулирующее
воздействие
,
интеграл от рассогласования будет
возрастать, следовательно регулирующее
воздействие
![]() будет продолжать изменяться. В результате
приток дополнительно уменьшится и
станет меньше , поэтому уровень в баке
начнет уменьшаться, что в свою очередь
вызовет уменьшение расхода
будет продолжать изменяться. В результате
приток дополнительно уменьшится и
станет меньше , поэтому уровень в баке
начнет уменьшаться, что в свою очередь
вызовет уменьшение расхода
![]() .
Приток и отток сравняются. Уровень
достигнет заданного значения
.
Приток и отток сравняются. Уровень
достигнет заданного значения
![]() .
Процесс регулирования по И-закону
прекратится, если
.
Процесс регулирования по И-закону
прекратится, если
![]() – это условие начинает выполняться в
момент времени
– это условие начинает выполняться в
момент времени
![]() .
.