

Режимы работы двигателя постоянного тока независимого возбуждения.
Их схемная реализация и механические характеристики.
Уравнения механической характеристики в различных режимах работы.
Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего момента д = f(M).
При использовании в электроприводе постоянного тока двигателя с независимым возбуждением - с питанием от источника напряжения U=const уравнение электромеханической характеристики (I) имеет вид:


Схема двигателя постоянного тока независимого возбуждения
Механическую характеристику (М) получим:
 .
.
При заданных U, Ф и R уравнения
(3.4) и (3.5) однозначно определяют связь
между
 ,
I и М в любых режимах. Характеристики
,
I и М в любых режимах. Характеристики
 и
и
 это прямые линии, проходящие через две
характерные точки: М= 0,
это прямые линии, проходящие через две
характерные точки: М= 0,
 и = 0, I =
Iкз, М = Мкз;
при Ф = const они различаются лишь
масштабами по оси абсцисс.
и = 0, I =
Iкз, М = Мкз;
при Ф = const они различаются лишь
масштабами по оси абсцисс.
Скорость
 (рис. 3.3) соответствует режиму идеального
холостого хода: М= 0, E = U и
направлены встречно.
(рис. 3.3) соответствует режиму идеального
холостого хода: М= 0, E = U и
направлены встречно.

Рис. 3.3. Механические (электромеханические) характеристики электропривода постоянного тока независимого возбуждения при U = const
Величина
 - перепад скорости под влиянием нагрузки.
- перепад скорости под влиянием нагрузки.
Участки характеристики между 0
и Мкз, где знаки
и М совпадают, соответствуют, как
было условлено ранее, двигательному
режиму работы; участки с разными
знаками
 и М - тормозным режимам.
и М - тормозным режимам.
Режимы работы двигателя постоянного тока последовательного возбуждения. Их схемная реализация и механические характеристики.
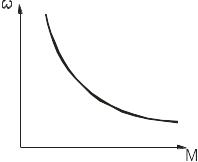
Механическая характеристика дпт с последовательным возбуждением.

 -
ЭМХ
-
ЭМХ

 -
МХ
-
МХ
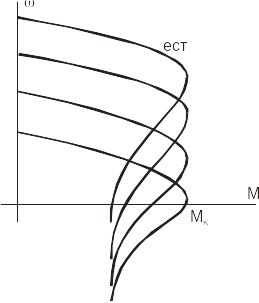
Особенность - большая крутизна в области малых моментов. Значительное увеличение и при малых М обуславливается уменьшением Ф. Построение реальной MX ведется на основании каталожных данных, где приводятся естественные характеристики u=f(Iя), M=ψ(Iя).
Если ω и М приводятся в относительных единицах, то такие характеристики называются универсальными, ω•=f(I•), М•=f(I•).
Режимы работы двигателя постоянного тока смешанного возбуждения. Их схемная реализация и механические характеристики.
Механическая характеристика ДПТ со смешанным возбуждением

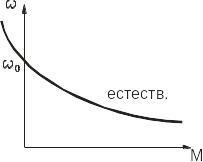
MX не имеет аналитического выражения. Пользуются естественными универсальными характеристиками, которые даются в каталогах.
Режимы работы асинхронного двигателя. Их реализация и механические характеристики.
Механические характеристики АД.
 -
ЭМХ;
-
ЭМХ;
 - МХ
- МХ
 ;
;
З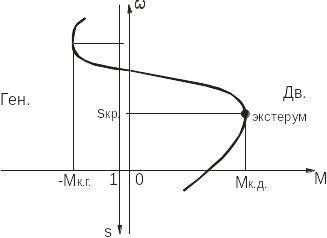 наки
± означают, что максимум момента может
иметь место:
наки
± означают, что максимум момента может
иметь место:
а) при s>0 (+) в двигательном режиме и режиме противовключения.
б) при s<0 (-) в генераторном режиме.
«+» - двигательный режим; «-» - генераторный
Формула
Клосса:
 .
.
Упрощенная

Таким образом, зная каталожные данные АД, можно построить MX и ЭМХ.
Искусственные характеристики АД
Включение дополнительного R Изменение U
в ротор АД (Rд<R1<R2<R3)

Изменение Х (реактивного Изменение частоты питающего
сопротивления в статоре, ХН < Х1 < Х2 < Х3) U (з-н Костенко) fH > f1 > f2.


U/f = const (одновременно изменяется U и f)
Электромеханические характеристики МХ
Типы ЭМХ: I1(s), I’2(s).
 (1)
(1)
При s∞ ток ротора I’2 стремиться к предельному значению.

Когда s>0, то I’2(s) монотонно возрастает.
Если s<0 – имеется максимум.

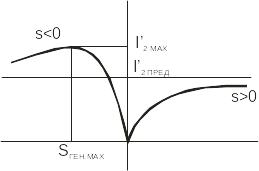
Ток ротора I’2 является основной величиной для оценки режима работы Д.
Для выражения I1(s):

где
 - коэффициент кратности тока Iμ
по отношению к I’2пр.
- коэффициент кратности тока Iμ
по отношению к I’2пр.