

4: Зависит от ширины полосы и ее положения в главном частотном диапазоне.
Ответ – 4.
ВОПРОС 3.2.18/к2. Необходимо ли применение весовых функций при синтезе низкочастотных и полосовых дифференцирующих фильтров?
Варианты ответов: 1- да, 2- нет, 3- да, но только для низкочастотных.
4- да, но только для полосовых.
Ответ – 1.
ВОПРОС 3.2.19/к2. Возможен ли синтез абсолютно гладких полосовых нерекурсивных частотных фильтров?
Варианты ответов: 1- да, 2- нет, 3- да, но только для низкочастотных.
4- да, но только для полосовых. 5- да, но только для высокочастотных.
Ответ – 1.
4. Рекурсивные фильтры
4.1. Принципы рекурсивной фильтрации
ВОПРОС 4.1.1/к2. Какой подстановкой значения z выполняется преобразование z-образа фильтра в его частотную характеристику?
Варианты ответов: 1: exp(-jt). 2: exp(-t). 3: exp(-jt)).
Ответ –1.
В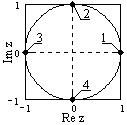 ОПРОС
4.1.2/к2. На
рисунке - модуль функции z=exp(-jt)
в z-плоскости. Какой точке плоскости
соответствует частота =0?
ОПРОС
4.1.2/к2. На
рисунке - модуль функции z=exp(-jt)
в z-плоскости. Какой точке плоскости
соответствует частота =0?
Варианты ответов: 1, 2, 3, 4.
Ответ – 1.
В ОПРОС 4.1.3/к2. На рисунке - модуль функции z=exp(-jt) в z-плоскости. Какой точке плоскости соответствует частота =/2?
Варианты ответов: 1, 2, 3, 4.
Ответ – 2.
В ОПРОС 4.1.4/к2. На рисунке - модуль функции z=exp(-jt) в z-плоскости. Какой точке плоскости соответствует частота =?
Варианты ответов: 1, 2, 3, 4.
Ответ – 3.
В ОПРОС 4.1.5/к2. На рисунке - модуль функции z=exp(-jt) в z-плоскости. Какой точке плоскости соответствует частота = -/2?
Варианты ответов: 1, 2, 3, 4.
Ответ – 4.
В ОПРОС 4.1.6/к2. На рисунке - модуль функции z=exp(-jt) в z-плоскости. Какой точке плоскости соответствует частота = - ?
Варианты ответов: 1, 2, 3, 4.
Ответ – 3.
ВОПРОС 4.1.7/к2. Рекурсивная система задана уравнением:
y(k) =
bn
s(k-n) +![]() am
y(k-m), N=М=1,
b0=0.8,
b1=0.2,
а1=0.5.
am
y(k-m), N=М=1,
b0=0.8,
b1=0.2,
а1=0.5.
Вычислите значение h2 импульсного отклика системы?
Варианты ответов: Числовое значение.
Ответ – 0.3.
ВОПРОС 4.1.8/к2. Рекурсивная система задана уравнением:
y(k) = bn s(k-n) + am y(k-m), N=М=1, b0=0.8, b1=0.2, а1=0.5.
Вычислите значение h3 импульсного отклика системы?
Варианты ответов: Числовое значение.
Ответ – 0.15.
ВОПРОС 4.1.9/к2. Рекурсивная система задана уравнением:
y(k) = bn s(k-n) + am y(k-m), N=М=1, b0=0.8, b1=0.2, а1=0.5.
Конечным или бесконечным является импульсный отклик системы?
Варианты ответов: 1: Конечным. 2: Бесконечным.
Ответ – 2.
ВОПРОС 4.1.10/к2. Можно ли реализовать рекурсивную цифровую фильтрацию данных без сдвига фазы?
Варианты ответов:
1- да, но только для низкочастотных. 2- да, но только для полосовых.
3- да, но только для высокочастотных. 4- да, двойной фильтрацией
с реверсированием данных. 5- нет,
Ответ – 4.
4.2. Синтез операторов фильтров
ВОПРОС 4.2.1/к2. Укажите уравнение системы при реализации рекурсивного цифрового фильтра в каскадной форме.
Варианты
ответов:
1:
![]() .
2: Ho(z)
.
2: Ho(z)![]() Bn(z)
/ [1+An(z)].
Bn(z)
/ [1+An(z)].
Ответ – 1.
ВОПРОС 4.2.2/к2. Укажите уравнение системы при реализации рекурсивного цифрового фильтра в параллельной форме.
Варианты ответов: 1: . 2: Ho(z) Bn(z) / [1+An(z)].
Ответ – 2.
ВОПРОС 4.2.3/к1. Под каким углом в z-плоскости находится радиус-вектор нуля и полюса передаточной функции рекурсивного цифрового фильтра режекции постоянной составляющей данных?
Варианты ответов: 1- 0о. 2- 90о. 3- 180о. 4- определяется расчетом.
Ответ – 1.
ВОПРОС 4.2.4/к1. Сколько пар нулей и полюсов имеет передаточная функция рекурсивного цифрового фильтра режекции постоянной составляющей данных?
Варианты ответов: 1, 2, 3, 4- определяется расчетом.
Ответ – 1.
ВОПРОС 4.2.5/к1. Сколько пар нулей и полюсов имеет передаточная функция рекурсивного цифрового фильтра режекции частоты Найквиста в данных?
Варианты ответов: 1, 2, 3, 4- определяется расчетом.
Ответ – 1.
ВОПРОС 4.2.6/к1. Под какими углами в z-плоскости находятся радиус-векторы нулей и полюсов передаточной функции рекурсивного цифрового фильтра режекции произвольной частоты в данных?
Варианты ответов: 1: 0о. 2: ±90о. 3- ±180о. 4- определяется расчетом.
Ответ – 4.
ВОПРОС 4.2.7/к1. Сколько пар нулей и полюсов имеет передаточная функция рекурсивного цифрового фильтра режекции произвольной частоты в данных?
Варианты ответов: 1, 2, 3, 4- определяется расчетом.
Ответ – 2.
ВОПРОС 4.2.8/к2. Как зависит ширина полосы пропускания (на половине высоты) рекурсивного цифрового фильтра режекции произвольной частоты в данных от расстояния R между полюсом и нулем?
Варианты ответов: 1- чем меньше R, тем меньше , 2- чем меньше R,
тем больше , 3- не зависит отR, а определяется расчетом.
Ответ – 1.
ВОПРОС 4.2.9/к2. Как зависит длительность импульсной реакции h рекурсивного цифрового фильтра режекции произвольной частоты в данных от расстояния R между полюсом и нулем?
Варианты ответов: 1- чем меньше R, тем меньше h, 2- чем меньше R,
тем больше h, 3- не зависит отR, а определяется расчетом.
Ответ – 2.
ВОПРОС 4.2.10/к1. Сколько пар нулей и полюсов (в сумме) имеет передаточная функция рекурсивного цифрового фильтра селекции произвольной частоты в данных?
Варианты ответов: 1, 2, 3, 4- определяется расчетом.
Ответ – 2.