

Задача 6. 2
Построить схему рулевого привода переднеприводного легкового автомобиля с реечным рулевым механизмом и определить зависимость углов поворота управляемых колес
-
Мд
= 1110
кг
– полная
масса груженого автомобиля (вес груженого
автомобиля
![]() кН);
кН);
- L = 2,32 м – база автомобиля;
- Ва = 1,314 м – колея передних колес автомобиля;
На рис. 6.5 показана схема установки управляемых колес.
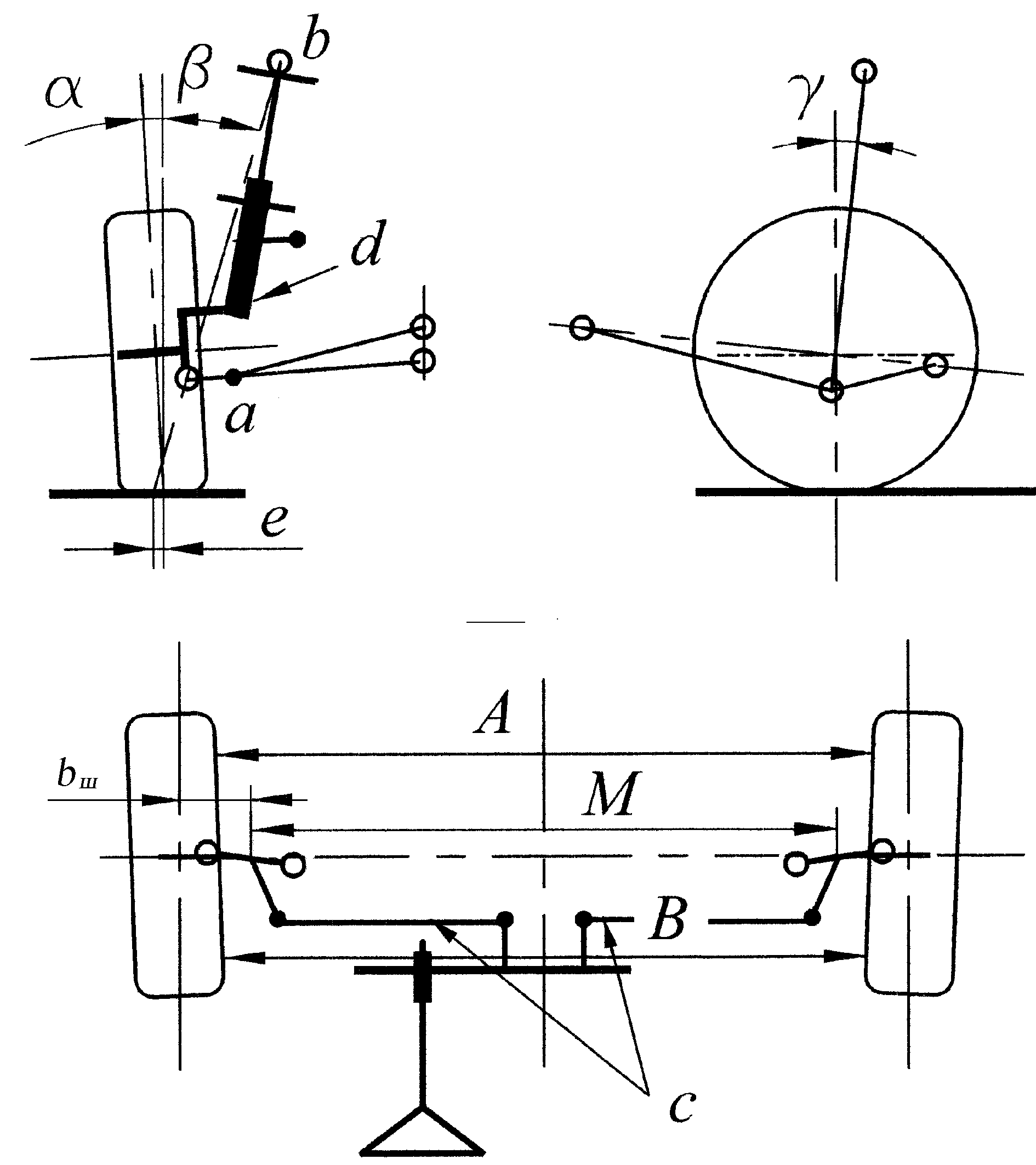
Рис. 6.5. Схема установки управляемых колес
Для
полностью груженого автомобиля задано
значение угла развала управляемых
колес ![]() .
Для автомобилей с передним приводом
принимают отрицательное схождение
колес, в данном случае назначаем
расхождение В
- А
= -
(1...3)
мм.
Регулировка расхождения осуществляется
за счет изменения длины поперечных
тяг "с"
рулевой трапеции.
.
Для автомобилей с передним приводом
принимают отрицательное схождение
колес, в данном случае назначаем
расхождение В
- А
= -
(1...3)
мм.
Регулировка расхождения осуществляется
за счет изменения длины поперечных
тяг "с"
рулевой трапеции.
После
размещения тормозных механизмов и
шарниров равных угловых скоростей
привода передних колес определено
положение наружного шарнира "а" нижнего
рычага подвески. Приняв значение плеча
обкатки
![]() мм,
находим положение оси "шкворня"
а-b.
Угол наклона оси шкворня при полной
нагрузке задаем
мм,
находим положение оси "шкворня"
а-b.
Угол наклона оси шкворня при полной
нагрузке задаем
![]() .
Регулировка угла наклона шкворня обычно
осуществляется эксцентриковыми болтами
крепления амортизаторной стойки к
поворотному кулаку. На рис.6.5 это место
регулировки "d" показано
стрелкой. Расстояние от вертикальной
оси колеса до оси "шкворня"
bш
= 120 мм. Расстояние между шкворнями
.
Регулировка угла наклона шкворня обычно
осуществляется эксцентриковыми болтами
крепления амортизаторной стойки к
поворотному кулаку. На рис.6.5 это место
регулировки "d" показано
стрелкой. Расстояние от вертикальной
оси колеса до оси "шкворня"
bш
= 120 мм. Расстояние между шкворнями
М = Ва – 2 · bш = 1324 – 2 · 120 = 1074 мм.
Угол наклона шкворня в продольной плоскости γ в выполненных конструкциях легковых автомобилей с передним приводом находится в пределах
![]() .
В данной схеме установки управляемых
колес принято значение
.
В данной схеме установки управляемых
колес принято значение ![]() .
.
При
полной загрузке автомобиля имеем:
;
;
;
![]() мм.
мм.
Выбор размеров рулевой трапеции
-
Принимаем значение ![]() ,
где LТ
- расстояние от оси передних колес до
точки пересечения продолжения боковых
рычагов рулевой трапеции на продольной
оси автомобиля; L
– база автомобиля, см. рис.5.6.
,
где LТ
- расстояние от оси передних колес до
точки пересечения продолжения боковых
рычагов рулевой трапеции на продольной
оси автомобиля; L
– база автомобиля, см. рис.5.6.
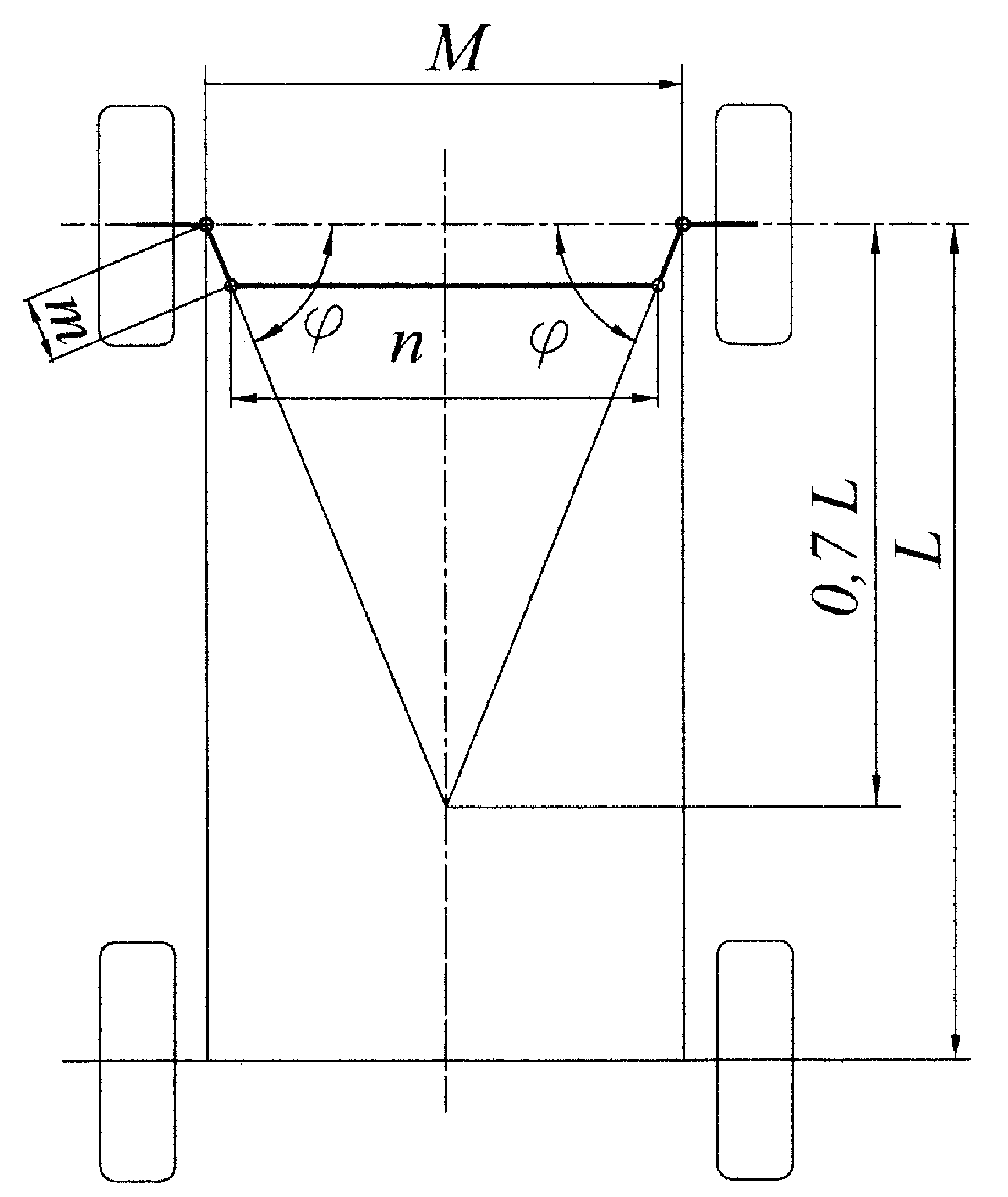
Рис. 6.6. Схема построения рулевой трапеции двухосного автомобиля
(с задним расположением рулевой трапеции)
- Угол наклона рычагов рулевой трапеции
![]() .
.
- Расстояние между шарнирами рычагов рулевой трапеции
(длина поперечной тяги)
 м,
м,
где отношение длины боковых рычагов рулевой трапеции к длине ее поперечной тяги в выполненных конструкциях составляет m/n = 0,12...0,16. Принимаем m/n = 0,14.
- Длина боковых рычагов рулевой трапеции
m = 0,14 · n = 0,14 · 0,9875 = 0,138 м.
- Максимальный угол поворота наружного колеса.
При
L'
= L,
см. рис. 6.7,
![]()
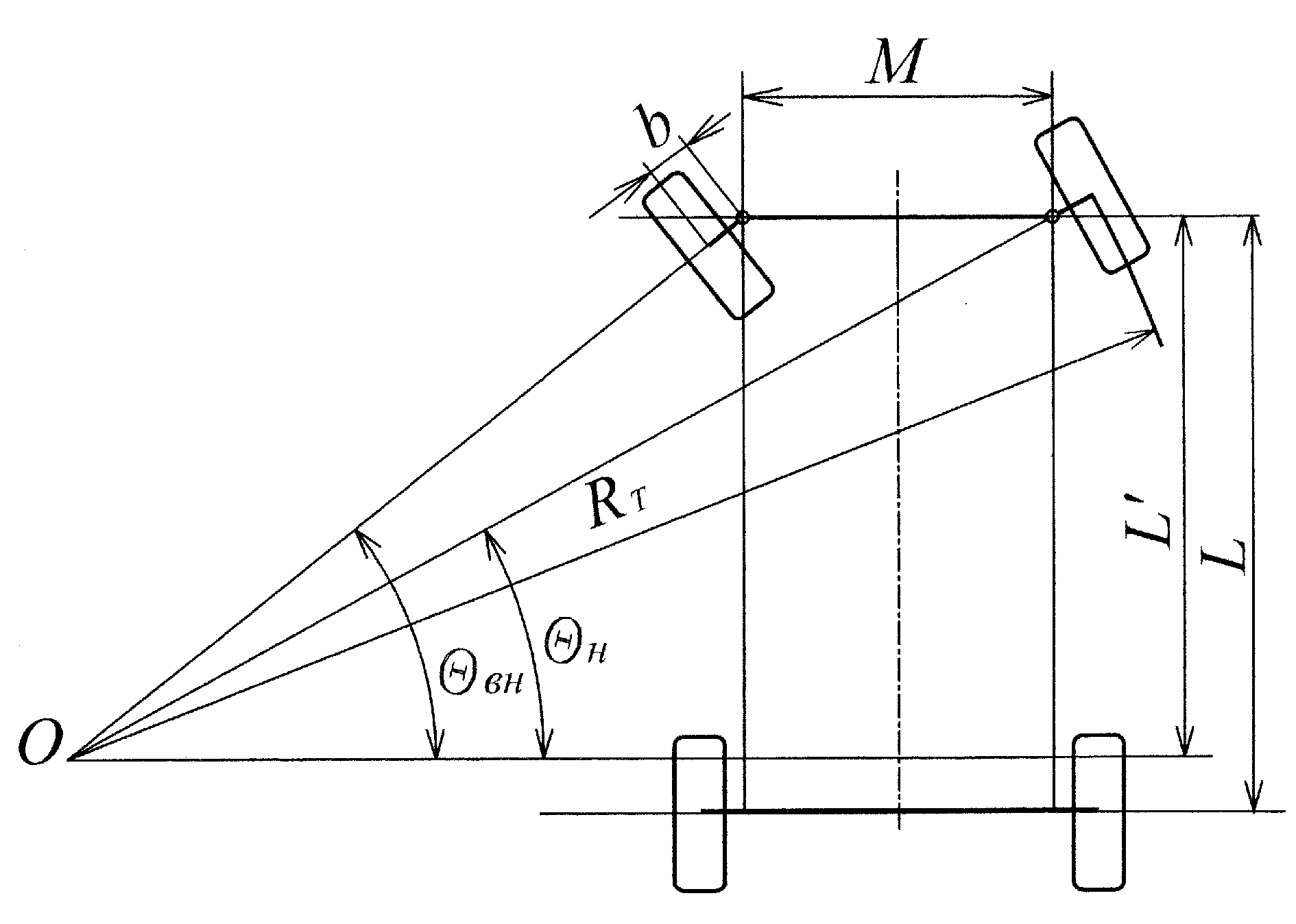
Рис. 6.7. Схема определения углов поворота управляемых колес
Здесь
![]() м
- расстояние от вертикальной оси колеса
до оси шкворня; R min
= 5 м
– минимальный радиус поворота автомобиля.
м
- расстояние от вертикальной оси колеса
до оси шкворня; R min
= 5 м
– минимальный радиус поворота автомобиля.
Максимальный угол поворота внутреннего колеса находят из выражения .
![]()
Откуда
![]() .
.
По
полученным данным строим кинематическую
схему рулевого привода. Поперечная
тяга рулевой трапеции при независимой
подвеске передних колес делается
разрезной. Задав положение рычага
рулевой трапеции по высоте, и расстояние
от оси передних колес до шарниров на
рейке вдоль продольной оси автомобиля
X
= 143 мм,
определяем
длину поперечной тяги
![]() мм,
см. рисунок П6.10 приложения П6. Задаем
расстояние между шарнирами крепления
поперечных тяг на рейке рулевого
механизма
мм,
см. рисунок П6.10 приложения П6. Задаем
расстояние между шарнирами крепления
поперечных тяг на рейке рулевого
механизма
![]() мм.
мм.
Уточняем
размеры трапеции, для чего графически
определяем фактическую зависимость
изменения углов поворота управляемых
колес, см. рис. 6.8 и сравниваем ее с
теоретической. Расчет теоретической
зависимости проводим по формуле
![]() в табличной форме, см. таблицу 6.3.
в табличной форме, см. таблицу 6.3.
Таблица 6.3
Теоретическая зависимость изменения углов поворота управляемых колес
|
|
|
|
|
(т) |
(гр) |
0,0 |
0,0 |
|
|
90 |
0,0 |
0,0 |
5,0 |
0,0875 |
11,428 |
11,891 |
85,19 |
4,81 |
|
10,0 |
0,176 |
5,682 |
6,145 |
80,76 |
9,24 |
9,46 |
15,0 |
0,286 |
3,731 |
4,192 |
76,59 |
13,41 |
|
20,0 |
0,364 |
2,747 |
3,210 |
72,70 |
17,30 |
17,60 |
25,0 |
0,466 |
2,146 |
2,609 |
69,03 |
20,97 |
|
30,0 |
0,577 |
1,733 |
2,196 |
65,52 |
24,48 |
24,39 |
35,0 |
0,700 |
1,429 |
1,892 |
62,14 |
27,86 |
27,14 |
40,0 |
0,839 |
1,192 |
1,655 |
58,86 |
31,14 |
|
Здесь ctg Qвн = 1/tg Qвн ; Q'н = arctg(M/L+ ctg Qвн);
Qн = 90 - Q'вн .
(т) - теоретический; (гр) - графический.
|
Рис. 6.8. Схема графического определения углов поворота управляемых колес |
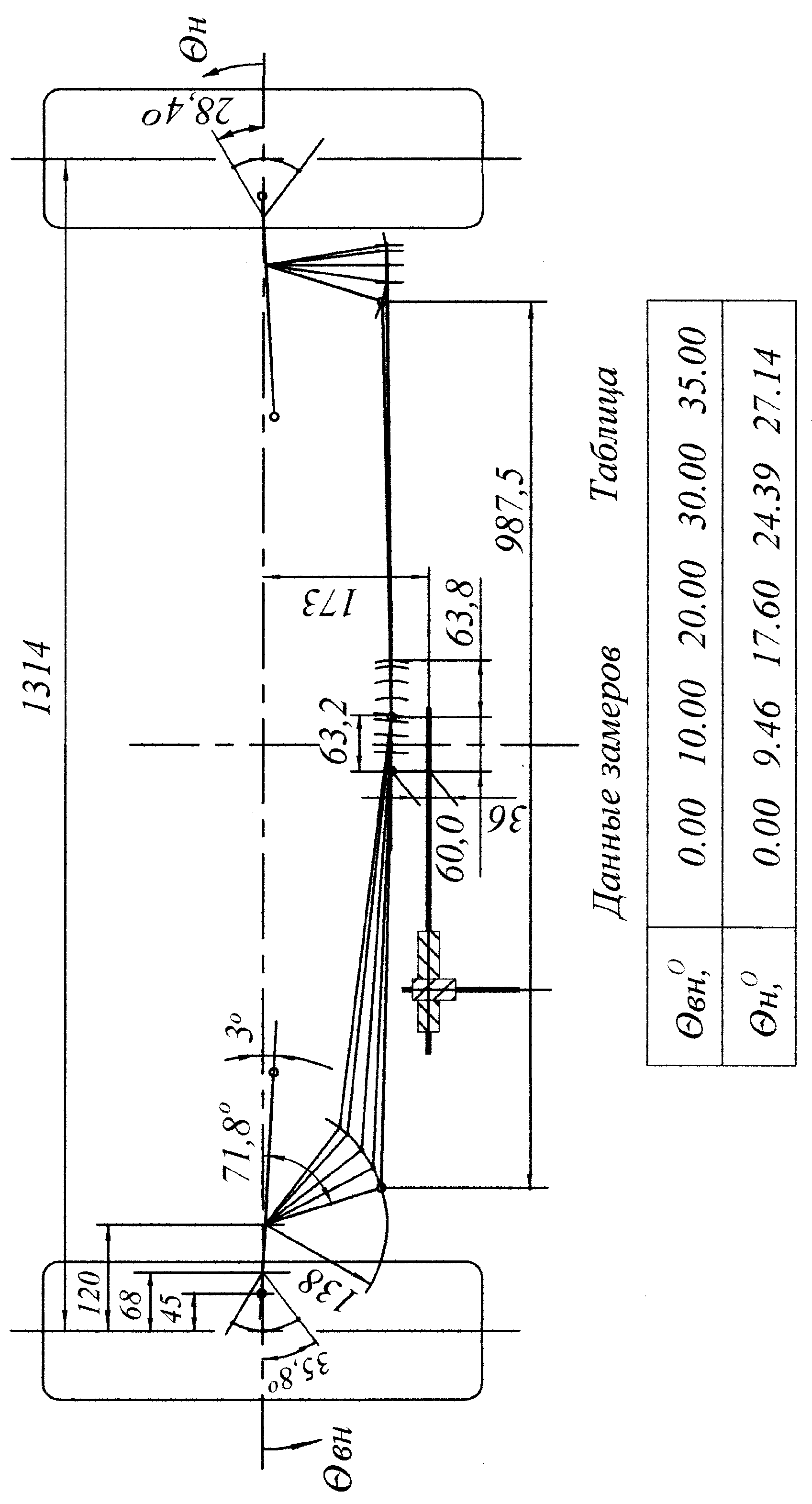
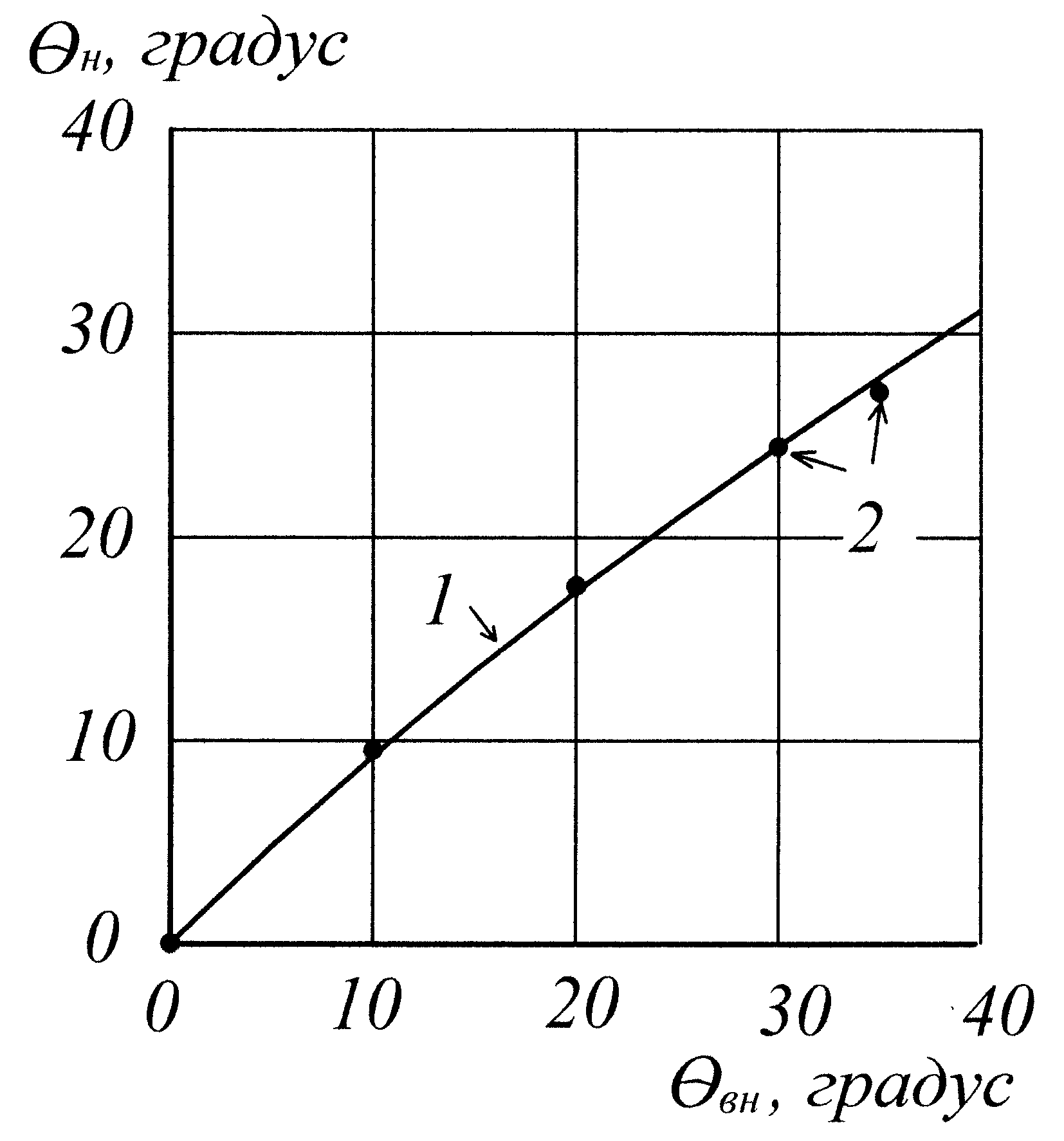
Рис. 6.9. Зависимость углов поворота управляемых колес:
—— - теоретическая; ● – графическая
Если максимальная разница между теоретическими и фактическими значениями не превосходит 1,5 o , при максимальном угле поворота внутреннего колеса, то считают, что трапеция подобрана правильно.
Зависимость
изменения углов поворота внутреннего
и наружного колес, представлены на рис.
6.9. Разница в значениях углов не превышает
ΔQ н =
0,7 o .
Максимальное перемещение рейки
составило ![]() мм.
мм.
Передаточные отношения
- Передаточное отношение рулевого привода
![]() мм/ o.
мм/ o.
- Принимаем значение максимального угла поворота рулевого колеса α max = ± 1,5 оборота (± 540 о). В выполненных конструкциях для разных типов АТС α max = ± 1,5...3 оборота (± 540...1080 o ).
Угловое передаточное отношение рулевого управления
U р.у = 2 · α max / ( Qвн.мах + Qн.мах ) = 2 · 540 /(35,8 + 28,4) = 16,8.
- Передаточное отношение рулевого механизма
U р.м = U р.у / U р.п = 16,8 / 2,05 = 8,25 o /мм.
Определение основных размеров рулевого механизма
Перемещение рейки рулевого механизма в зависимости от угла поворота рулевого колеса αmax = 0,5 · fр.max · Uр.м = 2 · π · r / 360 о . Отсюда находят радиус шестерни рулевого механизма
r = 360 о /(2 · π · Uр.м ) = 360 / 2 / 3,14 / 8,2 = 6,99 мм.
Принимаем: mн = 2 - нормальный модуль зубьев; z = 7 - число зубьев шестерни; β = 34o - угол наклона зубьев.
Окружной (торцевой) модуль
mt = mн /Cos β = 2 / Cos 34 = 2,4 мм.
Диаметр начальной окружности шестерни
d н = m t · z = 2,4·7 = 16,9 мм.
Конструктивный радиус шестерни
rн = dн /2 = 8,45 мм.
Уточняем:
- передаточное отношение рулевого механизма
Uр.м = 180 / π / rн = 180 / 3,14 / 8,45 = 6,784;
- максимальное перемещение рейки рулевого механизма
fр.max = 2 αmax / U р.м = 2· 5406,784 = 159,2 мм;
- передаточное отношение рулевого управления
U р.у = U р.м · U р.п = 6,784 · 2,05 = 13,91.