

для повышения устойчивости система “ОН - СУД” должна обладать инвариантностью к внешним возмущениям и причинам изменения режимов движения ОН;
для повышения управляемости, наоборот, система “ОН - СУД” должна обладать максимальной гибкостью и возможностью лёгкого и быстрого изменения режимов движения ОН.
Глава2. Измерительные устройства (иу) параметров движения он.
2.1 Измерительные устройства (иу) параметров углового движения он.
2.1.1 Иу углов качки курса
Продолжительность поворотов системы координат O0X0Y0Z0, связанной с объектом, относительно местной горизонтальной системы координат О0ξηζ, принятая на рис. 1.1, обуславливает отсчет углов α и ψ в горизонтальной и вертикальной плоскостях соответственно, а угла θ – в наклонной плоскости.
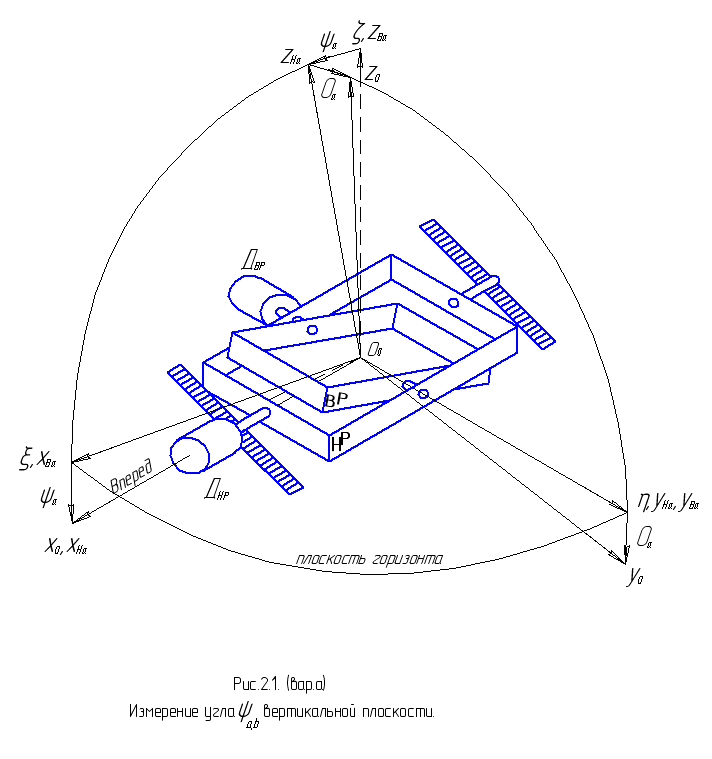
Выбор варианта отсчета углов качки и курса объекта целесообразнее всего провести из условия обеспечения их измерения наиболее широко распространенными гироскопическими приборами – гироскопами в трехстепенном кардановом подвесе (одна из степеней свободы – ось собственного вращения ротора гироскопа). При вертикальной ориентации и удерживании оси собственного вращения ротора гироскопа по направлению оси О0ζ плоскость внутренней рамы (ВР) карданова подвеса гироскопа при качке объекта остается в горизонтальной плоскости и имитирует на объекте, так называемый, искусственный горизонт, относительно которого и происходит измерение углов продольной ψ и поперечной θ качки объекта (рис. 2.1).
Такие гироскопические приборы получили название гировертикалей (ГВ), датчиков крена (ДК) или гирогоризонтов (ГГ).
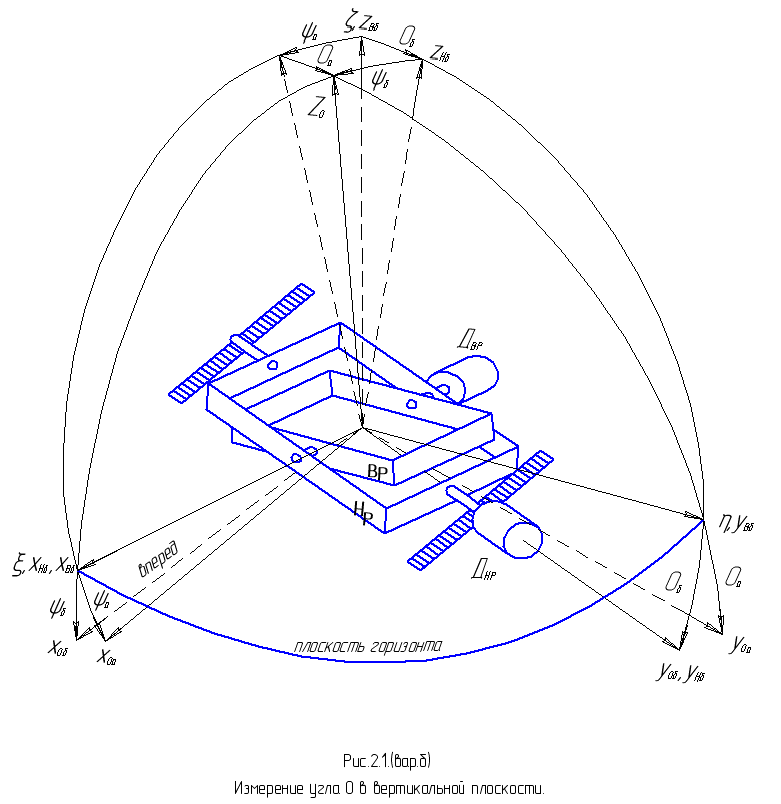
Возможны два варианта ориентации осей карданова подвеса гировертикали на объекте, приведенные на рис. 2.1 где ротор гироскопа и его ось собственного вращения во внутренней раме (ВР), направленная по оси O0ZВa (или O0ZВб), условно не показаны. В варианте (а) ось О0ХНа наружной рамы (НР) карданова подвеса (ГВ) параллельна продольной оси объекта О0Х0, а в варианте (б) ось OYHб наружной рамы карданова подвеса параллельна поперечной оси OY0 объекта. При этом измерение угла ψ продольной качки объекта в варианте (а) будет проводиться датчиком Двр, установленным по оси OYВб внутренней рамы карданова подвеса гировертикали, как угла ψа, лежащего в вертикальной плоскости, а в варианте (б) – датчиком ДНР, установленным по оси OYНб наружной рамы карданова подвеса гировертикали, как угла ψб, лежащего в наклонной плоскости. Напротив, измерение угла θ поперечной качки объекта в варианте (б) будет проводиться датчиком Двр, установленным по оси OХВб внутренней рамы карданова подвеса гировертикали, как угла θб, лежащего в вертикальной плоскости, а варианте (а) – датчиком Днр, установленным по оси ОХна наружной рамы карданова подвеса гировертикали, как угла θа, лежащего в наклонной плоскости.
Системы координат О0XвYвZв и О0XнYнZн на рис. 2.1 связанны с внутренней (ВР) и наружной (НР) рамами карданова подвеса гировертикали и обозначены соответственно индексами вариантов (а) и (б).
На рис. 2.1 (вар. б) наряду с измеряемыми в варианте (б) углами ψб и θб показаны также для сравнения углы ψа и θа. Очевидно, что при одном и том же положении базовой плоскости X0O0Y0 объекта относительно горизонтальной плоскости ξО0η, измеренные значения углов продольной и поперечной качки в вариантах (а) и (б) неодинаковы: ψа≠ψб; θа≠θб.
Поэтому для однозначности измерения и использования углов качки, характеризующих положение базовой плоскости X0O0Y0 объекта относительно горизонтальной плоскости ξО0η, принимают один из вариантов ориентации осей карданова подвеса гировертикали на объекте, что особенно важно при размещении на одном объекте нескольких кардановых подвесов для различных устройств (подвес гировертикали, подвесы стабилизации и наведения измерительных и наблюдательных устройств, подвесы постов управления, рабочих кресел операторов и др.).
Наиболее распространенной в технике ориентацией осей карданова подвеса на объекте является вариант (а) расположения оси О1Хна наружной рамы (НР) параллельно продольной оси О0Х0 объекта.
Из литературы [1], [3] известны тригонометрические зависимости (1), которые позволяют выразить углы ψа, θа через углы ψб, θб и наоборот:
sinψа=sinψб∙cosθб; sinψа=
 sinψб∙cosθa;
cosψа=
cosψб;
sinψб∙cosθa;
cosψа=
cosψб;
sinθб=sinθа∙cosψа; sinθб= sinθа∙cosψб; cosθб= cosθа; (2.1)
tgψа=tgψб∙cosθa; tgψб=tgψa∙secθa;
tgθб=tgθа∙cosψб; tgθa=tgθб∙sinψб,
где R=
 (при малых ψб
и θа
величина R
близка к 1).
(при малых ψб
и θа
величина R
близка к 1).В случае необходимости измерения обоих углов качки объекта в вертикальных взаимно перпендикулярных плоскостях используют одновременно две гировертикали с различной ориентацией осей карданова подвеса на объекте: вариант (а) – для измерения угла ψа и вариант (б) – для угла θб.
Известна конструкция, так называемого, бикарданова подвеса гироскопа, в котором две взаимно перпендикулярные оси двух наружных рам основного и дополнительного кардановых подвесов гировертикали связанны с объектом [3]. Это обеспечивает возможность измерения одним гироскопическим прибором углов ψа и θб одновременно.
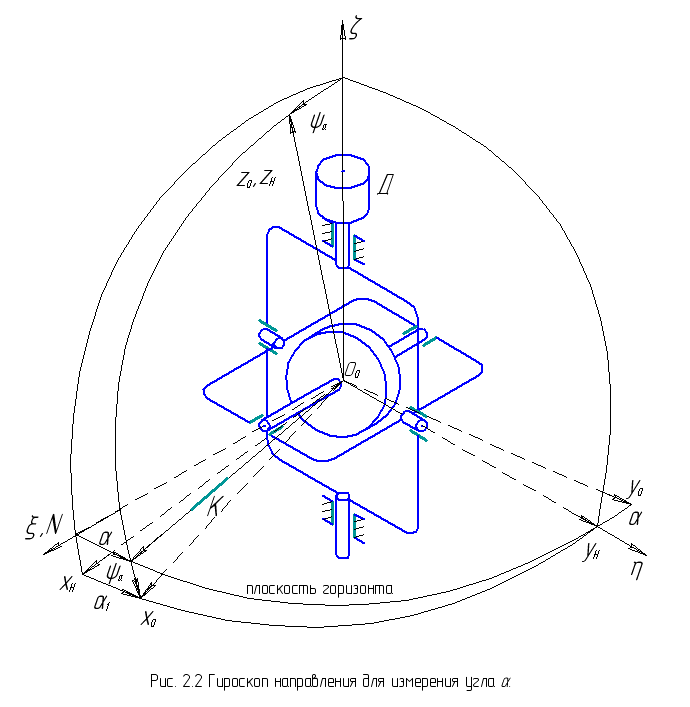
Кроме угловых координат ψ и θ, определяющих положение объекта относительно плоскости горизонта, ориентация продольной оси объекта относительно направления на Север N (ось О0ξ) определяется углом курса α, отсчитываемым в плоскости горизонта между направлением на Север N (ось О0ξ) и так называемой курсовой чертой К объекта (рис. 2.2).
Под курсовой чертой К объекта понимается положение продольной оси объекта О0Х0 при отгоризонтированной базой плоскости X0O0Y0 объекта. При наличии качки объекта направление курсовой черты К совпадает с проекцией продольной оси О0Х0 объекта на горизонтальную плоскость ξО0η. Иногда курс объекта отсчитывается не от направления на Север N, а от какого-то заданного направления в азимуте.
Измерение угла курса α проводится трех степенными гироскопами направления при ориентации осей карданова подвеса, показано на рис. 2.2. При этом ось О0ХВ собственного вращения ротора гироскопа (РГ) удерживается в горизонтальной плоскости и направлена по оси О0ξ , а оси О0YB и О0ZB внутренней (ВР) и O0YH, O0ZH наружной (НР) рам карданова подвеса гироскопа направления совпадают при ψ=θ=0 с осями О0ζ и О0ξ соответственно.
Гироскопы направления в литературе по авиационной технике именуют гирополукомпасами, а по наземной технике гирокурсоуказателями (ГКУ).
Измерение курсового угла α датчиком Д гироскопа направления (рис. 2.2) проводится в плоскости горизонта только при условии отсутствия качки объекта (ψ=θ=0), когда ось О0ZH наружной рамы (НР) карданова подвеса направлена вертикально.
При наличии качки объекта на углы ψ и θ, когда ось О0ZH наружной рамы карданова подвеса гироскопа направления отклонена от вертикали, а значит и от направления оси О0ξ, датчиком Д измеряется угол α1, лежащий в наклонной плоскости XHO0YH и отличающийся по величине от угла α.
Разница углов α и α1 принято называть кардановой погрешностью Δαк гироскопа направления:
Δαк= α–α1 (2.2)
Подробные преобразования для определения угла Δαк приведены в литературе [1], [2].
Наиболее широкое распространение при определении кардановой погрешности получили окончательные выражения вида:
 ;
; . (2.3)
. (2.3)Для малых углов α, ψа и θа получаем:
 (2.4)
(2.4)Как следует из (2.3) и (2.4) при установке гироскопа направления для измерения угла α курса объекта на стабилизированной в плоскости горизонта платформе, карданова погрешность Δαк будет отсутствовать. Однако неожиданное на первый взгляд проявление кардановой погрешности было установлено также при отсчете курсовых углов объекта измерительными устройствами даже в случае их установки на стабилизированных в плоскости горизонта платформах Па и Пб (рис. 2.3), если последние имеют различную ориентацию осей наружных рамок кардановых подвесов на объекте, аналогичных вариантам (а) и (б) (рис. 2.1).
Так, при отсутствии углов качки объекта (ψ=θ=0), как показано на рис. 2.3 отсчет угла α курса объекта производится измерительными приборами, установленными на платформах Па и Пб, от направления на Cевер N до курсовой черты К и углы αа и αб равны α. Датчики углов α измерительных приборов, установленных на платформах Па и Пб, юстируются таким образом, чтобы при направлении осей О0Хва и О0Хвб систем координат связанных с платформами Па и Пб, на Север N их сигналы курсового угла α были обнулены. Тогда в положении объекта, показанном на рис. 2.3 (ψ=θ=0), на платформах Па и Пб будут измерены одинаковые по величине углы αа и αб, как углы между направлением на Север N и осями О0Хва, О0Хвб, соответственно, и равные углу α.
При качке объекта (ψ≠0, θ≠0) взаимное положение осей О0Хва и О0Хвб относительно направления на Север N изменяется, как показано на рис. 2.4. Подробное построение, объясняющее взаимные повороты осей систем координат О0ХваYваZва и О0ХвбYвбZвб, связанных с платформами Па и Пб, соответственно, и вывод аналитических зависимостей для определения кардановой погрешности
 изложены в литературе [1], [3].
изложены в литературе [1], [3].Приведем здесь конечные выражения для определения величин угла
 :
: ;
; . (2.5)
. (2.5)Для малых углов
 ,
ψ и θ получаем из (2.5):
,
ψ и θ получаем из (2.5): (2.6)
(2.6)Таким образом, различная ориентация на объекте кардановых подвесов двух стабилизированных в плоскости горизонта платформ Па и Пб при качке объекта (ψ≠0;θ≠0) приводит к их развороту относительно друг друга в горизонтальной плоскости на угол .
Наличие этого взаимного разворота следует иметь в виду при отсчете курсовых направлений на горизонтируемых платформах в двух степенных кардановых подвесах с различной ориентацией их осей на объекте. Во избежание ошибок и неоднозначности в отсчете курсовых углов объекта на нескольких стабилизированных платформах следует принимать единообразное ориентирование осей их кардановых подвесов на объекте, например, по более распространенному варианту (а). При этом в реальных условиях размещения нескольких кардановых подвесов при одинаковой ориентации на объекте достичь идеальной параллельности их осей при монтаже не возможно. Зависимости для определения кардановых погрешностей по величине допусков на параллельность осей кардановых подвесов при монтаже на объекте подробно рассмотрены в работе [3].
При статическом наклоне объекта (ψ=const; θ=const) и движении по заложенному курсу (φ=const) карданова погрешность также будет иметь статический характер, а в условиях динамической качки объекта – динамический характер. Подробные примеры числовых значений погрешностей Δαк и графики для различных сочетаний значений углов качки приведены в работе [4]. Заметим здесь, что при малых углах качки и курса вличины кардановых погрешностей Δαк из (2.4) и из (2.6) равны, что объясняется одинаковостью их природы (
 ).
).