2.4. Системы определения местоположения он.
Навигация-наука о методах и средствах, обеспечивающих вождение ОН из одной точки пространства в другую по траекториям, которые обусловлены характером выдачи, временем ее выполнения и условиями окружающей обстановки.
Системы навигации являются теми техническими средствами, которые вырабатывают необходимую информацию для решения навигационных задач. Вся информация, используемая или вырабатываемая навигационными системами для обеспечения навигации ОН, называется навигационной информацией.
Классификацию навигационных систем проводят по признакам:
-общие признаки: область использования, назначение, объем вырабатываемой информации, режимы использования, степень автономности, используемые методы навигации, методы получения первичной информации, уровень автоматизации;
-частные признаки: особенности принципа действия, способ воспроизведения измеряемой величины и др.
Так по назначению измерители навигационной информации классифицируются на измерители: координат, скорости, ускорения, углов, угловых скоростей и ускорений.
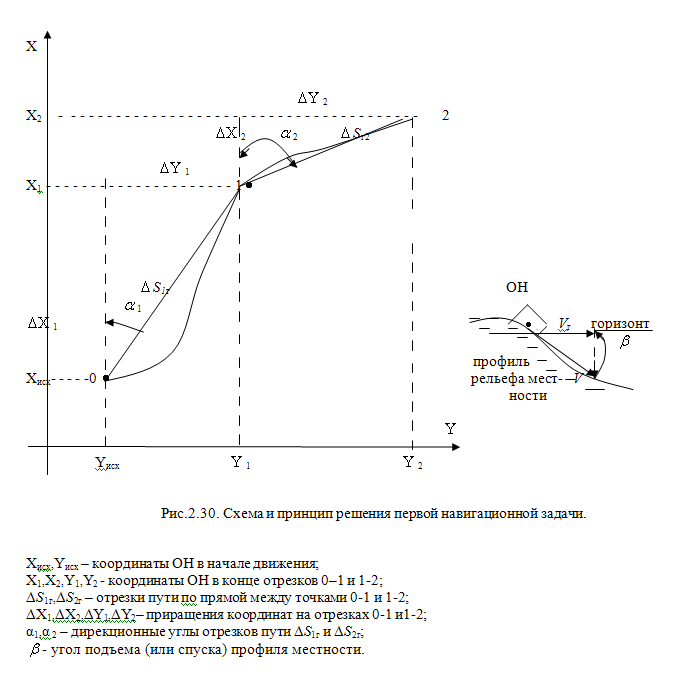
По методам получения первичной информации навигационные устройства подразделяют на одометрические, инерциальные, астрономические, магнитные, радиотехнические, спутниковые, корреляционные (Рис.2.29):
Методы счисления пути, основанные на измерении составляющих вектора ускорения или скорости движения объекта и интегрирования во времени этих составляющих известны как инерциальные и одометрические методы, соответственно.
Позиционныые методы навигации основаны на измерении физических величин, дающих линию или поверхность положения. Для определения 2-х или 3-х координат местонахождения объекта требуется иметь, соответственно, 2 или 3 взаимно пересекающиеся поверхности положения.
Обзорно-сравнительные методы основаны на обзоре окружающей местности и сравнении ее изображения с картой или системой ориентиров, заложенных в памяти.
Степень автономности навигационных устройств определяется относительным объемом используемой внешней информации. Чем меньше используется внешняя информация, тем более автономны навигационные устройства.
Для оценки качества и эффективности СН используют критерии: степень навигационного обеспечения; диапазон измерения, погрешность измерений, чувствительность, динамическая характеристика, приспособленность к условиям эксплуатации, надежность, живучесть, экономичность, удельная материалоемкость.
Обобщенной характеристикой СН является эффективность, определяемая степенью приспособленности навигационной системы к выполнению навигационных задач с требуемой точностью, надежностью, в течении заданного времени и в определенных условиях применения.
2.4.1.Одометрические навигационные системы ( ОНС).
Одометрические системы навигации в зависимости от целевого назначения объекта, на котором они применяются, решают первую, вторую и третью задачи.
Первая навигационная задача (основная):определение координат Χ и Υ местонахождения подвижного объекта и его дирекционного угла α.
Вторая навигационная задача: вычисление текущего направления на заданный пункт назначения αпн и расстояния Sпн до этого пункта.
Третья навигационная задача: вычисление координат Χц и Yц наблюдаемых целей.
На Рис.2.30. показано определение прямоугольных координат Χ и Υ машины при движении ее по участку местности. Примем, что за небольшой отрезок времени Δt1 машина перемещается из точки 0 в точку 1, и за Δt2– из точки 1 в точку 2; при этом скорость машины V1г и V2г, а также углы α1 и α2 на отрезках пути ΔS1г и ΔS2г остаются неизменными, а криволинейный маршрут заменяется ломанным.
Тогда приращение координат на этих отрезках будут:
 1
=V1г
1
=V1г t1
t1 cos
cos 1=
1= S1г
cos
1;
S1г
cos
1;
2=V2г t2 cos 2= S2г cos 2;
……………………………………………
Xn=Vnг tn cos n= Snг cos n
n n n
 Xi=
Viг
ti
cos
i=
Xi=
Viг
ti
cos
i= Siг
cos
i;
Siг
cos
i;
i=1 i=1 i=1
Y1=V1г t1 sin 1= S1г sin 1;
Y2=V2г
t2
sin
2 S2г
sin
2;
S2г
sin
2;
…………………………………………
Yn=Vnг tn sin n= Snг sin n
n n n
Yi = Viг ti sin i = Siг sin i;
i=1 i=1 i=1
Таким образом, координаты машины X и Y в любой текущий момент времени могут быть получены алгебраическим суммированием исходных координат Xисх и Yисх с приращениями координат ΣΔΧi и ΣΔΥi , которые в общем случае определяются интегралами:
n t
X
=Xисх+ Siг
cos
i=Xисх+
Siг
cos
i=Xисх+ V
cos
V
cos cos
dt;
cos
dt;
i=1 0
n t (2.46)
Y=Yисх Siг
sin
i=Yисх+
V
cos
sin
dt;
Siг
sin
i=Yисх+
V
cos
sin
dt;
i=1 0
Так
как Vг
V
cos ,
где
-
угол подъема (или спуска) профиля
местности.
,
где
-
угол подъема (или спуска) профиля
местности.
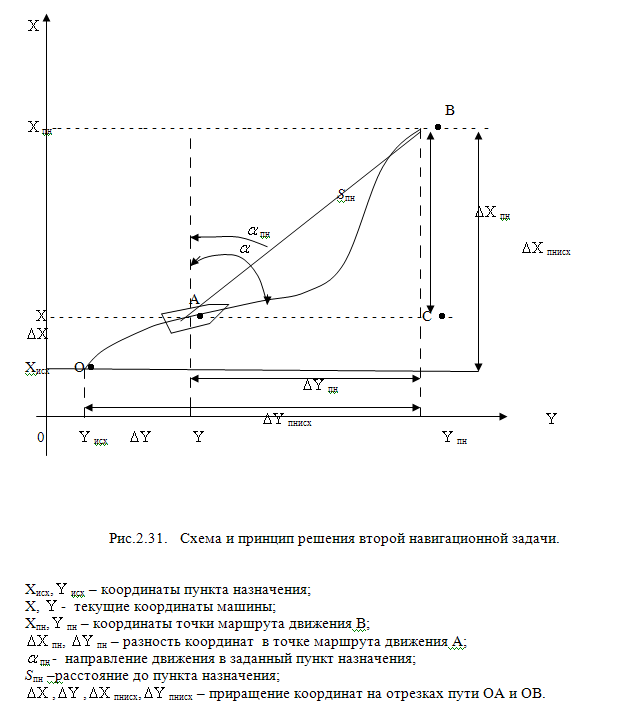
Вторая навигационная задача решается в тех случаях, когда заданы координаты пункта назначения.
При наличии аппаратуры, решающей первую навигационную задачу, представляется возможность определить направление пн движения в заданный пункт назначения, и вычислить оставшиеся до него расстояния Sпн. Принцип решения второй навигационной задачи показан на Рис. 2.31.
Из - ка АВС
Sпн=√
(
2пн+ 2пн)
= √((
2пн)
= √(( пн
-
)2+(
пн
-
)2+( пн
-
)2);
пн
-
)2);
(2.47.)
пн= arctg( пн/ пн) = arctg(Yпн-Y)/(Xпн-X);
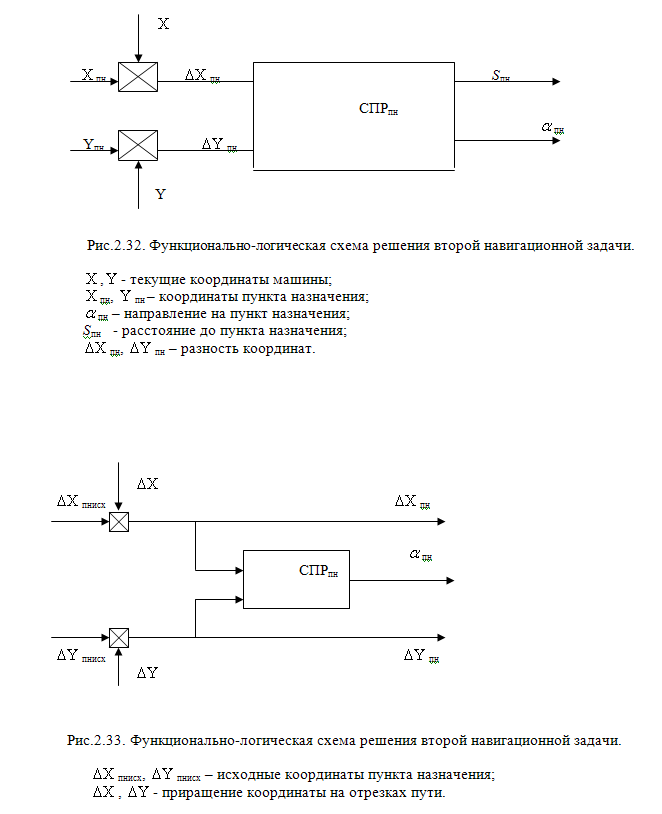
Функционально-логическая схема приведена на Рис. 2.32.
Входными данными для решения задачи служет текущие координаты X и машины и координаты пункта назначения Xисх и Yисх . Выходной информацией является направление пн на пункт назначения и расстояние Sпн до него.(Рис. 2.32.)
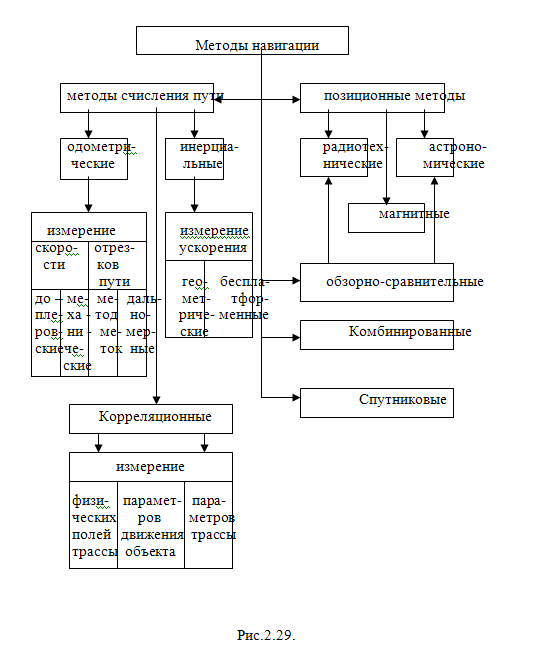
Внекоторых случаях вычисляется не расстояние Sпн ,а разность координат до пункта назначения.
В любой точке маршрута движения А (Рис.2.31.)оставшиеся разности координат будут определяться соотношениями:
пн пн
исх -
;
пн
пн
исх -
;
пн пн
исх -
.
пн
исх -
.
Функционально-логическая схема для такого случая показана на Рис.2.33.