

С О Д Е Р Ж А Н И Е
1.Общие сведения о системах управления мобильных роботов (СУД МР)
1.1 .Местоположение, ориентация и параметры движения объектов - носителей мобильных
роботов (ОН МР)
1.2.Основные задачи и принципы построения СУД МР
1.3.Общая классификация СУД
2.Измерительные устройства (ИУ) параметров движения ОН
2.1.Измерительные устройства (ИУ) параметров углового движения ОН
2.1.1. ИУ углов качки и курса, стабилизация ИУ
2.1.2.Датчики угловой скорости (ДУС)
2.2.Устройства измерения скорости движения и пройденного пути
2.2.1.Доплеровские измерители скорости (ДИС)
2.2.2.Инерциальные измерители пути
2.2.3.Корреляционные экстремальные измерители скорости (КЭС)
2.3.Системы предупреждения столкновения (СПС)
2,4.Системы определения местоположения ОН
2.4.1 .Одометрические навигационные системы (ОНС)
2.4.2.Инерциальные навигационные системы (ИНС)
2.4.3.Спутниковые радионавигационные системы (СРНС)
3.Системы очувствления и понимания интеллектных СУД
3.1 .Системы технического зрения (СТЗ)
3.1.1 .Задачи и структура СТЗ
3.1.2,'1'иповые элементы СТЗ
3.1.3,СТЗ мобильных роботов различного назначения
3.2.Системы представления знаний
3.3.Методы планирования маршрутов движения
4.Управляющие вычислительные системы (УВС)
4.1 .Назначение и классификация УВС
4.2.Основные требования к УВС и организация решения задач в УВС
4.2.1.Оценка необходимой производительности и емкости памяти УВС
4.3.Разновидности структурных схем построения УВС
4.3.1.УВС с общим полем памяти
4.3.2.МодульныеУВС
4.3.3.Организация связи УВС с управляющей системой
5.Системы управления движением МР различного назначения
5.1.Классификация и обобщенный состав МР различного назначения
5.2.Колесные носители как объекты управления
5.3.Гусеничные носители как объекты управления
5.4.Системы автоматического управления курсом
Глава 1. Общие сведения о системах управления движением мобильных роботов (суд мр).
1.1. Местоположение, ориентация и параметры движения объектов-носителей мобильных роботов (ОН МР).
Движение ОН можно рассматривать как одновременное поступательное перемещение центра масс (ЦМ) твёрдого тела (траекторное или орбитальное перемещение ЦМ ОН, характеризующее его местоположение) и вращательное движение вокруг ЦМ (угловое перемещение, характеризующее ориентацию ОН).
При изучении движения объекта относительно земной поверхности в выбранной системе координат OΣHZ поместим начало координат O в точку начала движения, направив ось ОZ по вертикали места и ось OΣ – на Север (Рис.1.1.). При этом условии оси OΣ и ОН будут совмещены с плоскостью горизонта. Систему координат OΣHZ будем называть земной горизонтальной системой координат.
Для удобства отсчёта угловых координат введём систему координат о0ξηζ, имеющую начало о0 в центре масс объекта и движущуюся поступательно с объектом при сохранении параллельности осей, соответствующим осям системы координат OΣHZ. Систему координат о0ξηζ будем называть местной горизонтальной системой координат.
Начало о0 системы координат o0x0y0z0, связанной с объектом, совместим также с центром масс объекта, направив ось o0x0 вдоль продольной оси объекта вперёд, ось o0y0 – вдоль поперечной оси объекта, а ось o0z0 – перпендикулярно к плоскости x0o0y0 вверх (все принятые здесь системы координат - правые). Плоскость x0o0y0 назовём базовой плоскостью объекта (это, например, плоскость палубы для корабля, плоскость погона башни для экскаватора или танка). При установке объекта на горизонтальном основании и отсутствии поворотов вокруг центра тяжести базовая плоскость объекта горизонтальна.
Таким образом, положение объекта в процессе движения, по отношению к выбранной системе координат OΣHZ, определяется шестью параметрами: тремя линейными координатами x, y и z, характеризующими положение центра масс объекта в системе координат OΣHZ, и тремя угловыми координатами α, ψ и θ, характеризующими взаимное положение осей системы координат o0ξηζ и соответствующих осей системы координат o0x0y0z0. При этом углы продольной ψ и поперечной θ качки определяют положение базовой плоскости объекта x0o0y0 относительно горизонтальной плоскости ξo0η, а угол курса α – направление продольной оси o0x0 объекта относительно оси o0ξ, т.е. относительно направления на Север N. Угол курса α отсчитывается в горизонтальной плоскости.
К основным параметрам движения ОН относятся также линейные и угловые скорости и ускорения.
Поступательное
движение ЦМ ОН описывается в линейном
варианте системой уравнений (1.1):


 (1.1)
(1.1)
вращательное движение ОН вокруг ЦМ – системой уравнений (1.2):

 (1.2)
(1.2)
где
 -
масса ОН МР;
-
масса ОН МР;


 -
проекции внешних сил на оси системы
координат OΣHZ;
-
проекции внешних сил на оси системы
координат OΣHZ;





 - моменты
внешних сил и моменты инерции ОН МР
- моменты
внешних сил и моменты инерции ОН МР
относительно осей системы координат o0x0y0z0.
Следует
иметь в виду, что текущие параметры
движения в конкретный момент времени
будут отличаться по величине в зависимости
от системы координат, на оси которой
они спроектированы. Так если вектор
 задан координатами ξ,
η
и ζ
в системе o0ξηζ,
то для определения его координат x0,
y0
и z0
в системе o0x0y0z0
используют известную [1] преобразующую
матрицу А
(или матрицу А-1
для обратного преобразования):
задан координатами ξ,
η
и ζ
в системе o0ξηζ,
то для определения его координат x0,
y0
и z0
в системе o0x0y0z0
используют известную [1] преобразующую
матрицу А
(или матрицу А-1
для обратного преобразования):

 (1.3)
(1.3)
где
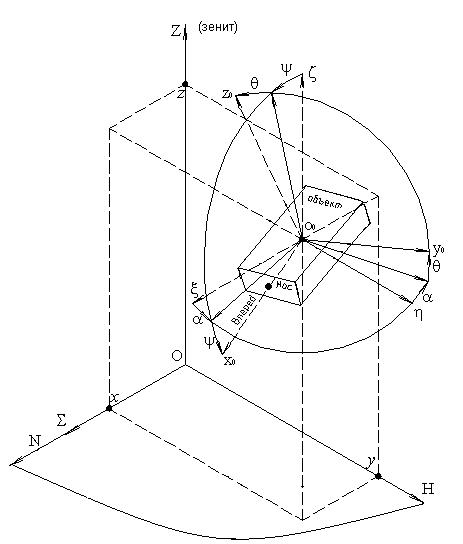
Рис.1.1. Положение объекта в пространстве.
OΣHZ – земная горизонтальная система координат;
o0ξηζ – местная горизонтальная система координат;
o0x0y0z0 – система координат, связанная с объектом;
o0x0, o0y0 – продольная и поперечная оси объекта соответственно;
o0 – центр масс объекта;
x, y, z – координаты местоположения объекта;
ψ, θ – углы продольной и поперечной качки соответственно;
ON – направление на север;
α – угол курса объекта.
Здесь
элементы матриц

 - направляющие косинусы осей координат
одной системы относительно осей другой.
- направляющие косинусы осей координат
одной системы относительно осей другой.