

1.6. Использование спутниковых навигационных систем в процессе развития и обновления геодезических сетей
Развертывание вокруг Земли глобальных навигационных спутни- ковых систем (GNSS) типа российской ГЛОНАСС и американской NAVSTAR GPS или совместной адаптированной системы позволяет перейти на принципиально новую технологию топографо-геодезических, гидрографических, гидрогеологических и других работ, обеспечивающих высокую точность и эффективность их производства. Действительно, возможность определения положения, т.е. координат точек местности с использованием этих систем позволяет оперативно создавать новые государственные геодезические сети, сети сгущения, обновлять существующие или восстанавливать утерянные, а также решать иные инженерно-геодезические задачи.
Сущность решения этих задач с использованием навигационных систем заключается в следующем.
Процесс определения местоположения точек местности или их координат подразделяется на три составных части или как говорят на три сегмента: космический сегмент, сегмент управления и сегмент пользователей.
Космический сегмент
Космический сегмент связан с научно обоснованным размещением искусственных спутников Земли (ИСЗ) на околоземных орбитах в единой геоцентрической системе координат: пространственных прямоугольных координат XYZ или геодезической системе BLH (геодезические широта, долгота и высота). Параметры орбит, их густота и насыщенность ИСЗ должны обеспечивать непрерывное глобальное перекрытие земной поверхности и поверхности Мирового океана.
Не вдаваясь в профессиональные тонкости, рассмотрим решение этой проблемы с практической точки зрения.
Навигационные системы развернуты в орбитальных плоскостях, наклонение которых к плоскости экватора постоянно 1 (рис.2). Количество спутников 2, вращающихся в этих плоскостях должно быть равно 24, из которых 21 спутник основных и 3 запасных. В системе ГЛОНАСС три орбитальные плоскости, а в GPS – шесть. Отсюда в российской системе в каждой плоскости расположены восемь равноотстоящих друг от друга на 450 спутников с наклонением орбит 64,80; в американской системе в каждой плоскости расположены три равноотстоящих друг от друга на 1200 спутника с наклонением орбит около 550. При этом имеет место не только наклонение орбит к плоскости экватора и смещение их на соответству-ющую величину по долготе, но и сдвиг относительно друг друга спутников смежных орбит по широте около 400. Тем самым указанное число спутни-ков достаточно для непрерывного глобального перекрытия при условии одновременного наблюдения в любой точке земной поверхности и Мирового океана не менее четырех спутников. Все спутники находятся на
к
Рис. 2. Схема
размещения ИСЗ на околоземных орбитах
(1) и определения координат точек (3)
местности при помощи глобальных
спутниковых систем.
1
– схема размещения ИСЗ в орбитальных
плоскостях; 2 – навигационные ИСЗ; 3
– GPS-приемники,
устанавливаемые на точках определения
координат; 4
– дисплей микроЭВМ вывода результатов
вычислений.
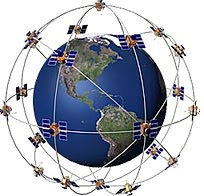



 руговых
орбитах, радиусы которых равны около
26 тыс. км.
руговых
орбитах, радиусы которых равны около
26 тыс. км.
О
На борту каждого
ИСЗ системы имеются стандарты частоты
(один кварцевый, два цезиевых и два
рубиновых), солнечные батареи, двигатели
корректировки орбиты, прие- мо-передающая
аппаратура и компьютер. Генерация
навигационных сигналов и сигналов
синхрони- зации на борту каждого
спутни-ка осуществляется сверхстаби-льными
атомными эталонами частоты.

D2
D1 D3
D4
Рис. 3. Взаимное расположение
определяемой точки N и ИСЗ
навигационной системы