

20. Приведите функциональную схему суэп с частотно-токовым управлением ад с короткозамкнутым ротором. Поясните принцип формирования управляющих сигналов.
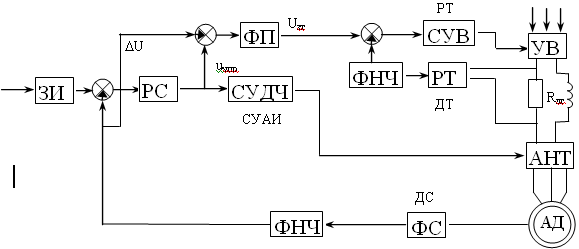
В системах f-I управления двигатель питается от ТП частоты с автономным инвертором тока (АИТ). В таком случае УВ совместно с контуром регулирования тока выпрямителя образует источник тока. Управление двигателем: производится путем задания тока статора и частоты АИТ. Обе величины, в свою очередь, зависят от общего сигнала задания на систему, определяющего скорость двигателя.
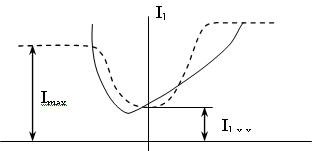
Статическая амплитудная харак – ка функцион. преобразователя.
Формула для скольжения имеет вид SL = *S = *(0-)/. Функциональный преобразователь стоит внутри замкнутого контура управления, т.е. охвачен ОС(фактически по скольжению) поэтому схема не имеет многих недостатков присущих такого рода системам.
Задание на ток статора является сигнал ФП, в котором реализуется характеристика I1=F(S2). Входным сигналом ФП является сигнал u2, пропорциональный абсолютному скольжению S2. Этот сигнал образован как разностный сигнал между сигналом uv, пропорциональным при линейной регулировочной характеристике АИТ частоте напряжения статора, и сигналом тахогенератора uтг, пропорциональным частоте вращения ротора. Система управления работает таким образом, что при регулировании скорости приближенно обеспечивается постоянство потока двигателя.