

СУЭП
1. Нарисуйте функциональную электрическую схему одноконтурной СУЭП постоянного тока с тиристорным преобразователем на основе управляемого выпрямителя. Дайте характеристику каждому элементу схемы (назначение, техническая реализация, основные параметры). Укажите ограничения применимости такой СУЭП.
2. Нарисуйте функциональную электрическую схему одноконтурной СУЭП постоянного тока с широтно-импульсным преобразователем. Дайте характеристику каждому элементу схемы (назначение, техническая реализация, основные параметры). Укажите достоинства такой СУЭП по сравнению с СУЭП на основе управляемого выпрямителя.
3. Нарисуйте функциональную электрическую схему двухконтурной СУЭП постоянного тока с подчиненным регулированием тока якоря ДПТ. Дайте характеристику каждому элементу схемы (назначение, техническая реализация, основные параметры). Покажите вид переходных процессов при настройке внешнего контура на технический оптимум.
4. Нарисуйте функциональную электрическую схему двухконтурной СУЭП постоянного тока с подчиненным регулированием тока якоря ДПТ. Дайте характеристику каждому элементу схемы (назначение, техническая реализация, основные параметры). Покажите вид переходных процессов при настройке внешнего контура на симметричный оптимум.
5. Нарисуйте функциональную электрическую схему трехконтурной СУЭП постоянного тока с подчиненным регулированием напряжения тиристорного преобразователя и тока якоря ДПТ. Дайте характеристику каждому элементу схемы (назначение, техническая реализация, основные параметры). Укажите методы настройки контуров.
6. Нарисуйте функциональную электрическую схему системы двухзонного управления машиной постоянного тока. Дайте характеристику каждому элементу схемы (назначение, техническая реализация, основные параметры). Покажите временную диаграмму разгона привода.
7. Нарисуйте структурную динамическую схему аналогового задатчика интенсивности СУЭП и соответствующую временную диаграмму разгона привода. Дайте характеристику каждому элементу схемы (назначение, техническая реализация, основные параметры). Запишите выражение, лежащее в основе расчета задатчика.
8. Нарисуйте схему и временную диаграмму работы трехфазного мостового нереверсивного управляемого выпрямителя. Запишите выражение для средневыпрямленной ЭДС.
9. Нарисуйте функциональную электрическую схему системы импульсно-фазового управления для трехфазного мостового нереверсивного управляемого выпрямителя. Покажите временную диаграмму работы одного канала.
10. Нарисуйте схемы и дайте сравнительный анализ реверсивных управляемых выпрямителей с раздельным и совместным управлением вентильными группами.
11. Покажите полную структурную динамическую схему машины постоянного тока (с передаточными функциями) в именованных координатах. Перечислите факторы, определяющие нелинейность схемы.
12. Покажите полную структурную динамическую схему машины постоянного тока (с передаточными функциями) в относительных координатах. Укажите способ перехода к относительным координатам и факторы, определяющие нелинейность схемы.
13. Покажите линеаризованную структурную динамическую схему машины постоянного тока (с передаточными функциями) в именованных координатах. Укажите условия линеаризации.
14. Покажите линеаризованную структурную динамическую схему машины постоянного тока (с передаточными функциями) в относительных координатах. Укажите способ перехода к относительным координатам и
15. Покажите функциональные схемы и дайте сравнительный анализ преобразователей частоты со звеном постоянного тока следующих типов: УВ-АИН; УВ-АИТ; НУВ-АИН.
16. Покажите принципиальную электрическую схему ПЧ типа УВ-АИН на тиристорах (со схемами искусственной коммутации). Нарисуйте временную диаграмму АИН с углом проводимости 1800.
17. Покажите принципиальную электрическую схему ПЧ типа УВ-АИТ на тиристорах (со схемами искусственной коммутации). Нарисуйте временную диаграмму АИТ с углом проводимости 1200.
18. Покажите принципиальную электрическую схему ПЧ типа НУВ-АИН на IGВТ-модулях. Нарисуйте графики фазного напряжения и тока в нагрузке (для одной фазы).
19. Приведите функциональную схему СУЭП на основе АД с короткозамкнутым ротором, в которой реализуется закон скалярного управления,
20. Приведите функциональную схему СУЭП с частотно-токовым управлением АД с короткозамкнутым ротором. Поясните принцип формирования управляющих сигналов.
1. Нарисуйте функциональную электрическую схему одноконтурной СУЭП постоянного тока с тиристорным преобразователем на основе управляемого выпрямителя. Дайте характеристику каждому элементу схемы (назначение, техническая реализация, основные параметры). Укажите ограничения применимости такой СУЭП.
Регулирование выходного напряжения ведомых сетью тиристорных преобразователей осуществляется за счет задержки включения тиристоров относительно точки естественного включения ( – угол управления). Могут быть с ОС по току, скорости и напряжению.
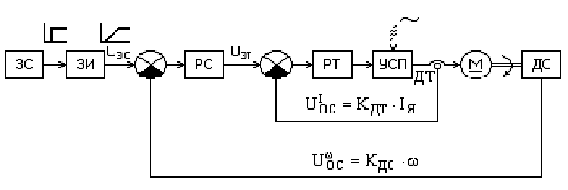
Регулятор тока - РТ, управляемый силовой преобразователь - УСП, датчик тока – ДТ, Регулятор скорости РС, датчик скорости ДС и элемент сравнения. На входе контура установлен задатчик скорости (определяет установившееся значение ) и задатчик интенсивности ЗИ (определяет ускорение в переходном режиме). Наличие ЗИ позволяет ограничивать пусковые и тормозные броски тока якоря при скачкообразном изменении напряжения на входе ЗС.
Однако, выбросы тока якоря, вызываемые скачкообразным изменением нагрузки на валу ДПТ, так ограничить нельзя (ЗИ стоит вне замкнутого контура управления). Поэтому используется другая мера – ограничение выходных координат регуляторов. Так, ограничивая выходной сигнал РС, являющийся задающим для контура тока (Uзт), можно ограничить и максимальное значение тока ДПТ. Ограничение выходного сигнала РТ приводит к ограничению управляющего напряжения на входе силового преобразователя.
Реализация РТ, ЗИ, РС осуществляется на ОУ, охваченных ООС или ПОС.
Отрицательная обратная связь по току применяется для реализации мягких характеристик ЭП.
В системе с отрицательной обратной связью по скорости можно получить абсолютно жесткие характеристики, но только при очень большом коэффициенте усиления. Такие же характеристики можно получить при интегральном регуляторе скорости.
2. Нарисуйте функциональную электрическую схему одноконтурной СУЭП постоянного тока с широтно-импульсным преобразователем. Дайте характеристику каждому элементу схемы (назначение, техническая реализация, основные параметры). Укажите достоинства такой СУЭП по сравнению с СУЭП на основе управляемого выпрямителя.
Р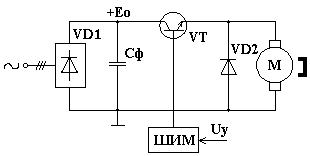 егулирование
выходного напряжения в ШИП осуществляется
за счет изменения скважности (относительно
продолжительности включенного состояния).
егулирование
выходного напряжения в ШИП осуществляется
за счет изменения скважности (относительно
продолжительности включенного состояния).
Транзисторы в этих преобразователях работают в ключевом режиме, а тиристоры должны иметь узлы искусственной коммутации.
Нереверсивный ШИП, где VD2 – защищает транзистор от перенапряжения.
Режим непрерывного тока (РНТ) – квазиустановившийся режим приведен на рисунке, где – относительная продолжительность включенного состояния.
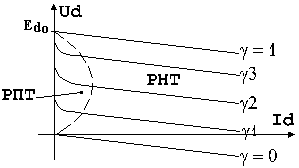
Внешняя характеристика представлена на рисунке, где приняты обозначения: РПТ – режим прерывистых токов; РНТ – режим непрерывных токов.
Область применения ШИП – быстродействующие системы АЭП.
3. Нарисуйте функциональную электрическую схему двухконтурной СУЭП постоянного тока с подчиненным регулированием тока якоря ДПТ. Дайте характеристику каждому элементу схемы (назначение, техническая реализация, основные параметры). Покажите вид переходных процессов при настройке внешнего контура на технический оптимум.
4. Нарисуйте функциональную электрическую схему двухконтурной СУЭП постоянного тока с подчиненным регулированием тока якоря ДПТ. Дайте характеристику каждому элементу схемы (назначение, техническая реализация, основные параметры). Покажите вид переходных процессов при настройке внешнего контура на симметричный оптимум.
Регулятор тока - РТ, управляемый силовой преобразователь - УСП, датчик тока – ДТ, Регулятор скорости РС, датчик скорости ДС и элемент сравнения. На входе контура установлен задатчик скорости (определяет установившееся значение ) и задатчик интенсивности ЗИ (определяет ускорение в переходном режиме). Наличие ЗИ позволяет ограничивать пусковые и тормозные броски тока якоря при скачкообразном изменении напряжения на входе ЗС.
Однако, выбросы тока якоря, вызываемые скачкообразным изменением нагрузки на валу ДПТ, так ограничить нельзя (ЗИ стоит вне замкнутого контура управления). Поэтому используется другая мера – ограничение выходных координат регуляторов. Так, ограничивая выходной сигнал РС, являющийся задающим для контура тока (Uзт), можно ограничить и максимальное значение тока ДПТ. Ограничение выходного сигнала РТ приводит к ограничению управляющего напряжения на входе силового преобразователя. В системе управления приводом в качестве УСП используется тиристорный преобразователь ТП, состоящий из управляемого выпрямителя, СИФУ, ФНЧ, ГОН.
Контур тока в качестве ОУ настраивается на технический оптимум. Контур скорости в зависимости от требований к жесткости механических характеристик может настраиваться и на технический оптимум, и на симметричный.
Реализация РТ, ЗИ, РС осуществляется на ОУ, охваченных ООС или ПОС.
Выбор производится по величине статической ошибки и перерегулирования по соотношениям:
δст>1%, σ<40% -> П-ПИ (настройка на технический оптимум).
δст<=1%, σ=>40% -> ПИ-ПИ (настройка на симметричный оптимум).
настройка на технический оптимум
настройка на симметричный оптимум
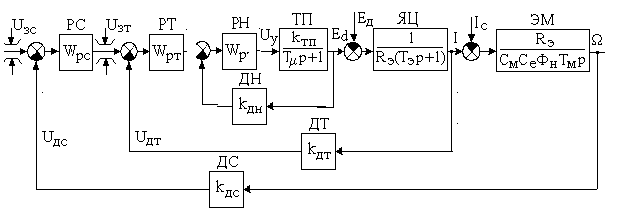
5. Нарисуйте функциональную электрическую схему трехконтурной СУЭП постоянного тока с подчиненным регулированием напряжения тиристорного преобразователя и тока якоря ДПТ. Дайте характеристику каждому элементу схемы (назначение, техническая реализация, основные параметры). Укажите методы настройки контуров.
 Регулятор
тока - РТ, управляемый силовой
преобразователь - УСП, датчик тока –
ДТ, Регулятор скорости РС, датчик скорости
ДС и элемент сравнения. На входе контура
установлен задатчик скорости (определяет
установившееся значение )
и задатчик интенсивности ЗИ (определяет
ускорение в переходном режиме). Наличие
ЗИ позволяет ограничивать пусковые и
тормозные броски тока якоря при
скачкообразном изменении напряжения
на входе ЗС.
Регулятор
тока - РТ, управляемый силовой
преобразователь - УСП, датчик тока –
ДТ, Регулятор скорости РС, датчик скорости
ДС и элемент сравнения. На входе контура
установлен задатчик скорости (определяет
установившееся значение )
и задатчик интенсивности ЗИ (определяет
ускорение в переходном режиме). Наличие
ЗИ позволяет ограничивать пусковые и
тормозные броски тока якоря при
скачкообразном изменении напряжения
на входе ЗС.
В качестве регулятора скорости используется П-регулятор с ПФ W(p) = k. В кач-ве регуляторов тока и напряжения используются ПИ-регуляторы, ПФ кот. W(p) = (Tp+1)/p. Контур регулирования напряжения отрабатывает погрешность УВ. Контур тока при изменении тока регулирует эл.вел-ну подаваемую на регулятор напряжения. Контур скорости служит для поддержания заданной вел-ны угловой скорости вала двиг-ля.
Однако, выбросы тока якоря, вызываемые скачкообразным изменением нагрузки на валу ДПТ, так ограничить нельзя (ЗИ стоит вне замкнутого контура управления). Поэтому используется другая мера – ограничение выходных координат регуляторов. Так, ограничивая выходной сигнал РС, являющийся задающим для контура тока (Uзт), можно ограничить и максимальное значение тока ДПТ. Ограничение выходного сигнала РТ приводит к ограничению управляющего напряжения на входе силового преобразователя. В системе управления приводом в качестве УСП используется тиристорный преобразователь ТП, состоящий из управляемого выпрямителя, СИФУ, ФНЧ, ГОН.
Реализация РТ, ЗИ, РС осуществляется на ОУ, охваченных ООС или ПОС.
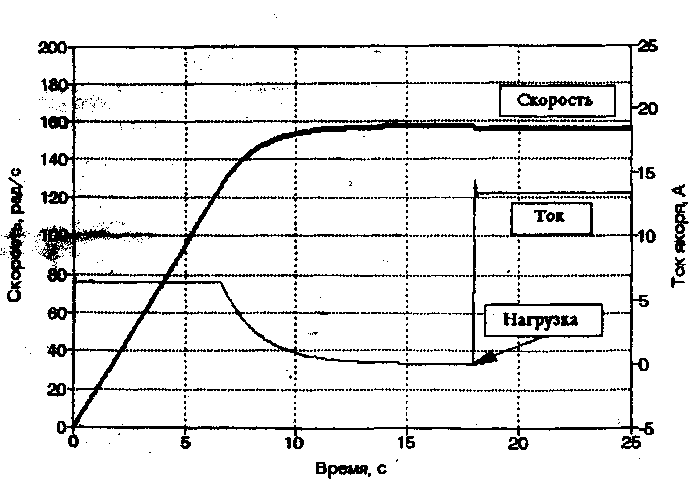
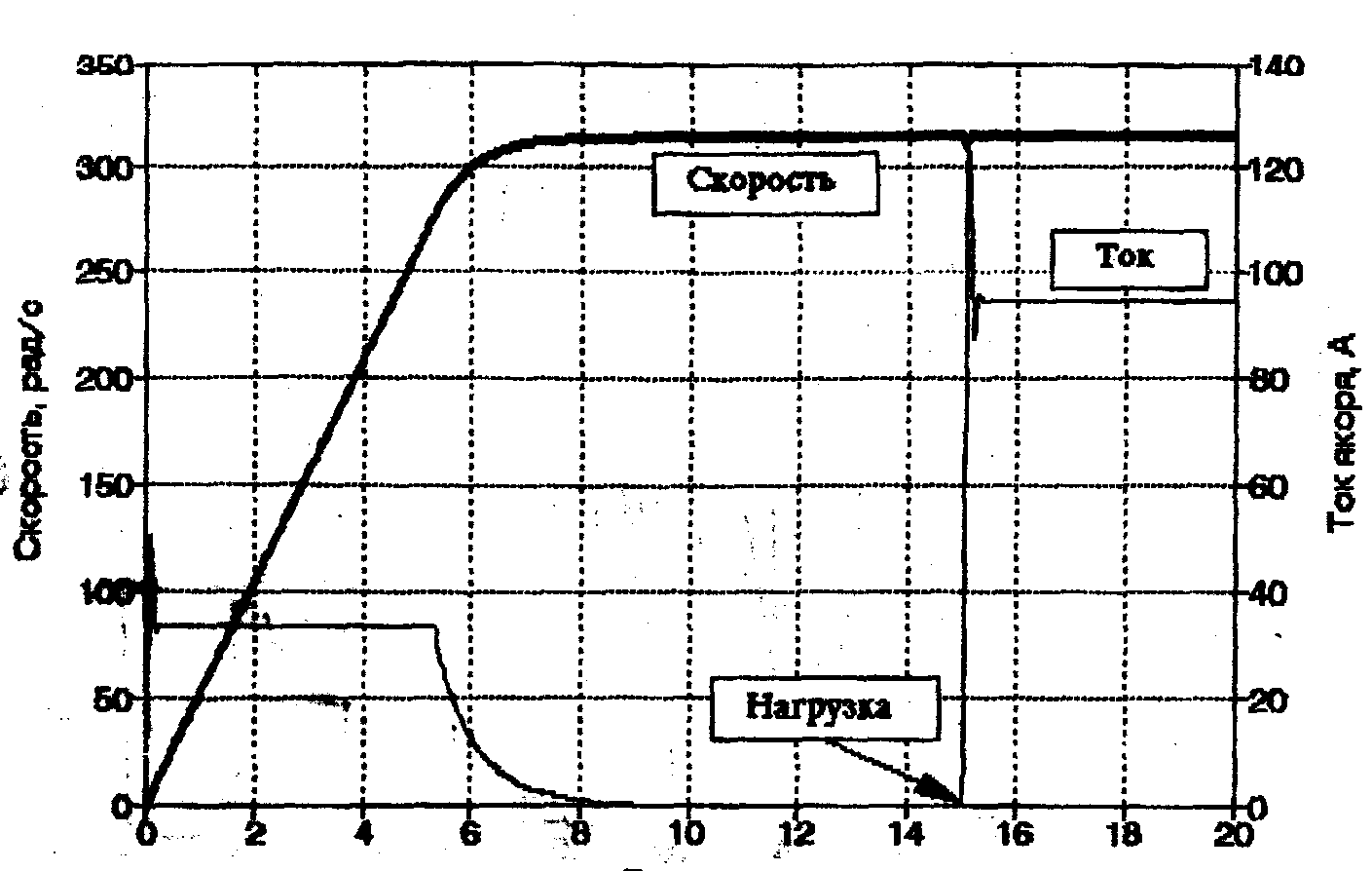
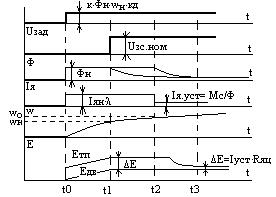
6. Нарисуйте функциональную электрическую схему системы двухзонного управления машиной постоянного тока. Дайте характеристику каждому элементу схемы (назначение, техническая реализация, основные параметры). Покажите временную диаграмму разгона привода.
В ДПТ с НВ может регулироваться напряжение якоря Uя и магнитный поток – это двухзонное регулирование. Рег-ие в 1-ой зоне наз-ся уровнением якорной цепи, во 2-ой – уравнение по цепи возбуждения. В1-ой зоне при ω<ωн Iв, Ф=const; во 2-ой зоне при ω>= ωн, Uя= const.
Функциональная схема двухзонного АЭП (с реверсом по ЯД) с зависимым управляемым полем двигателя в функции ЭДС, где приняты обозначения: ВМ – выявитель модуля (нужен, т.к. ЭП реверсивный по Я); ТПВ – нереверсивный; РЭ – регулятор ЭДС; РП – регулятор потока; ФП – функциональный преобразователь (в статическом режиме воспроизводит кривую намагничивания); Rзэ – резистор подстроечный (его устанавливают в момент наладки и дальше не трогают, причем Uзэ Ен).
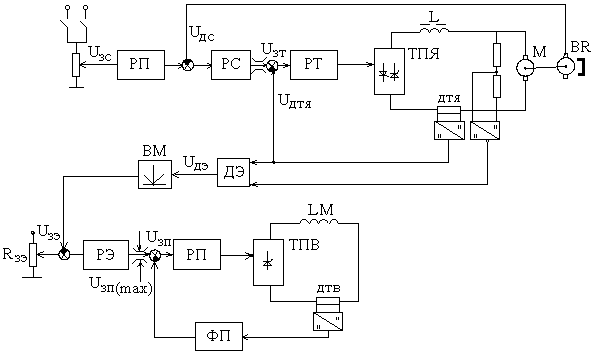
О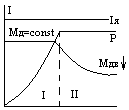 граничение
контролируемых координат осуществляется
либо за счет ограничения сигналов
внешних регуляторов, либо за счет
ограничения сигналов, заданных на входе
(с задатчиков скорости и ЭДС). В общем
случае за счет ограничения сигналов
задания.
граничение
контролируемых координат осуществляется
либо за счет ограничения сигналов
внешних регуляторов, либо за счет
ограничения сигналов, заданных на входе
(с задатчиков скорости и ЭДС). В общем
случае за счет ограничения сигналов
задания.
Контур ЭДС разомкнут и регулятор ЭДС находится в верхнем ограничении. Уровень ограничения выбран так, чтобы Iв, Ф=const. Разгон идет при Ф=const, когда ω<ωн напряжение обратной связи по ЭДС становится сравнительным с Uогрэдс и ЭДС выходит из ограничения, замыкания тем самым контур регулирования ЭДС двигателя. Когда при дальнейшем нарастании скорости будет повышаться Uя, несмотря на то что Uзс продолжает повышаться, т.к. контур ЭДС удерживает Едв=const (изменение потока Ф). На интервале t1-t2 с постоянным ускорением определяем значение динамического момента Мдин = кФнIян -Мс. На интервале t2-t3 ускорение падает и становится постоянным ε(t)< εн. Это вызывает понижение динамического момента под действием системы регулирования тока возбуждения Мдин = кФ(t)Iян λ-Мс.
7. Нарисуйте структурную динамическую схему аналогового задатчика интенсивности СУЭП и соответствующую временную диаграмму разгона привода. Дайте характеристику каждому элементу схемы (назначение, техническая реализация, основные параметры). Запишите выражение, лежащее в основе расчета задатчика.
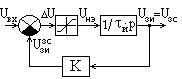
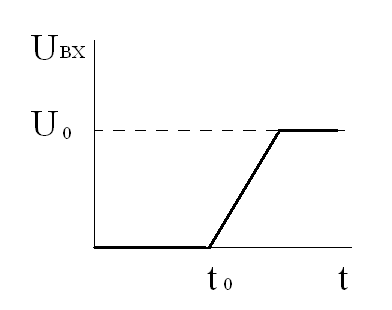
Назначение задатчика интенсивности является ограничение ускорения, развиваемого приводом в переходных режимах.
Динамический режим ЗИ характеризуется неравенством:
![]()
Практически, для нахождения скорости изменения напряжения берется равенство:
![]()
В
статическом режиме ЗИ при работе на
номинальной скорости должно выдерживаться
соотношение:
![]()

DA1 – суммирующий усилитель с 2х сторонним ограничением, VD1- 2х анодный стабилитрон, R4-регулирование усиление каскада в линейном режиме, DA3 – интегратор, DA2 - ООС с коэффициентом передачи k (регулируется R5).
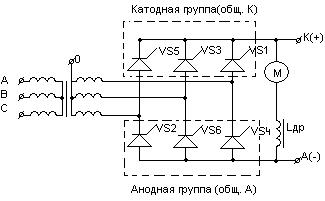
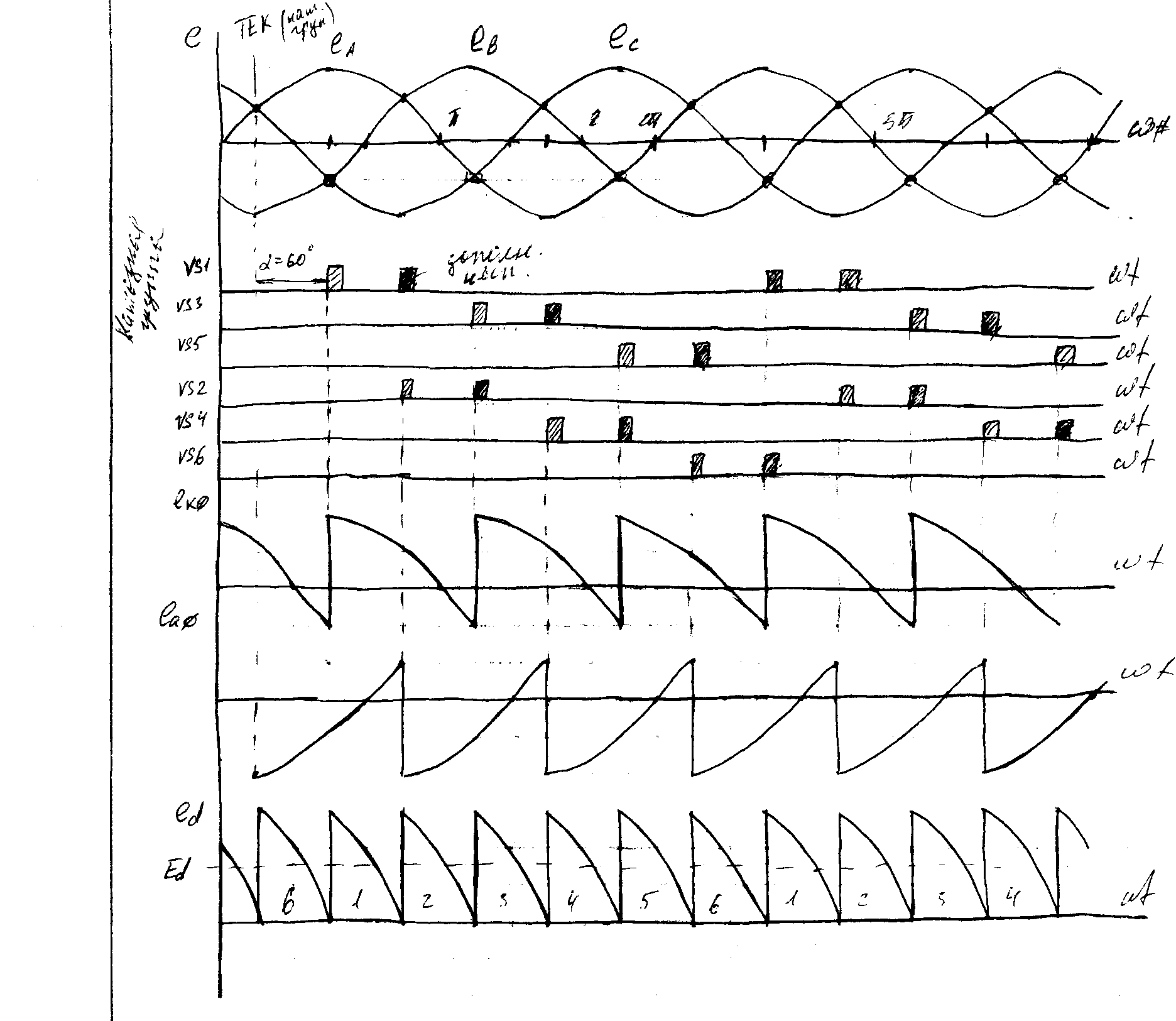
8. Нарисуйте схему и временную диаграмму работы трехфазного мостового нереверсивного управляемого выпрямителя. Запишите выражение для средневыпрямленной эдс.
У.В.- выполняются, как правило, на тиристорах. В технике управляемого электропривода используется один метод отпирания тиристора – метод импульсного воздействия.
Наибольшее распространение на практике получила мостовая трехфазная схема, представляющая собой сдвоенную нулевую схему и работает на обоих полупериодах переменного напряжения.
П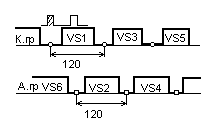 роцесс
переключения тиристеров дополнительно
характеризуется упрощенной диаграммой
переключения.
роцесс
переключения тиристеров дополнительно
характеризуется упрощенной диаграммой
переключения.
Характеристика управления выпрямителя описывается тем же выражением, что и для нулевой схемы:
Ed=Ed0·cosα. Отличие в том, что Ed0 в 2 раза больше. Ed0=2·1,17·E2, Ed0=1,35·E21.
9. Нарисуйте функциональную электрическую схему системы импульсно-фазового управления для трехфазного мостового нереверсивного управляемого выпрямителя. Покажите временную диаграмму работы одного канала.
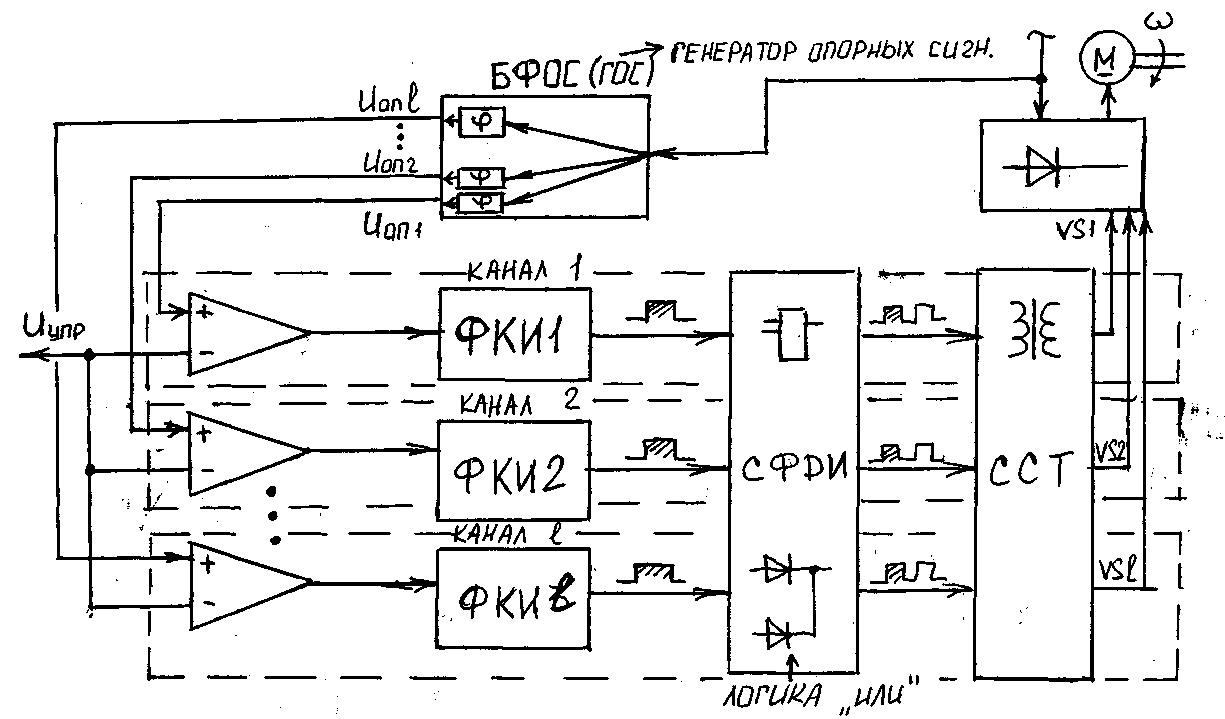
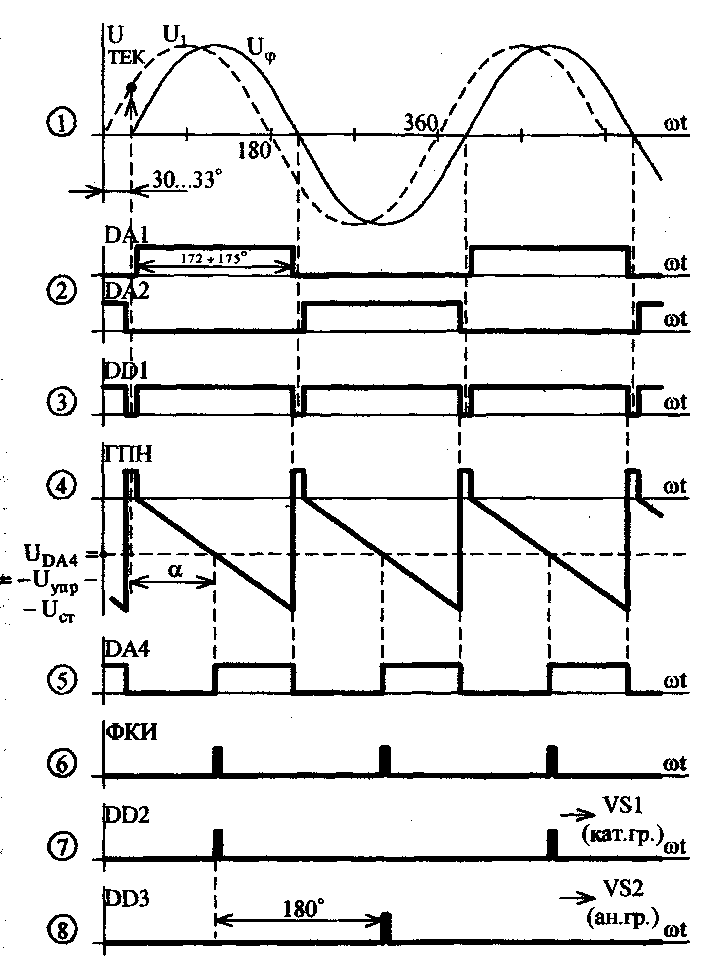
Напряжение поступает на фазовращатель, осуществляющий сдвиг сигнала по фазе на 33˚ ( что соответствует времени задержки гармонического сигнала с частотой 50 Гц на 1.8 мс). После фазовращателя гармоническое напряжение подается на инвертирующий компаратор DA2 и инвертирующий вход компаратора DA3. Эти компараторы предназначены для преобразования подаваемого горманического сигнала в два прямоугольных, сдвинутых относительно друг друга на 180˚.Длительность положительного импульса и паузы на выходе как DA1, так и DA2 различны. В угловом исчислении τи=172…175˚, а τп=188…185˚. Это необходимо для формирования на DD1 импульса, запускающего генератор пилообразного напряжения. На эпюре напряжения ГПН – первый участок прямоугольный, в положительной области напряжений (участок блокировки СИФУ), второй–линейно изменяющийся, в отрицательной области (рабочий участок). Опорное пилообразное напряжение с выхода ГПН подается на инвертирующий вход компоратора DA4. На компораторе DA4 сравнивается напряжение UОП c напряжением – (Uупр+UСМ). В результате сравнения образуется прямоугольный импульс, по переднему фронту которого формируется короткий импульс, являющийся основным для тиристеров VS1 и VS4. Разрешающиеся импульсы подаются на вторые входы DD2 и DD3 в противофазе, благодаря чему одновременное прохождение отпирающих коротких импульсов на оба тиристотра исключается.
10. Нарисуйте схемы и дайте сравнительный анализ реверсивных управляемых выпрямителей с раздельным и совместным управлением вентильными группами.
РУВ обеспечивают возможность реверса МПТ. Их делят на 2 класса: 1) РУВ с совместным управлением вентильными группами; 2) РУВ с раздельным управлением вентильными группами; Рассмотрим сх. РУВ с СУ. В любой момент времени одна ВГ работает в выпрямительном режиме, другая – в инверторном. При реверсе режимы групп меняются местами. Если α1 – угол отпирания ВГ1, α2 – ВГ2, то при α1 + α2 = π имеет место согласованное управление ВГ. При
α1 + α2 = π + 2αо имеет место несогласованное управление ВГ (αо – угол смещения от согласованного управления)
Хар-ка управления сх. имеет вид:
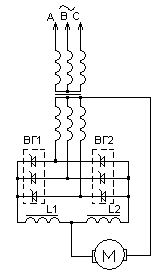
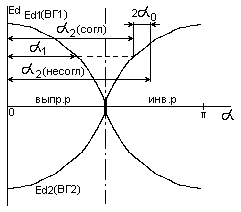
При согласованном упр-ии Еd1=Ed2; при несогласованном упр-ии |Edи| > |Edв|. Режим когда |Edи| < |Edв| является аварийным, т.к. приводит к резкому возрастанию уравнительного тока через дроссели L1, L2. Несогласованное упр-ие вводится уменьшения вероятности попадания схемы в такой режим при наличии помех в системе управления. Тем неменее даже при несогласованном упр-ии для мгновенных значений ЭДС может не выполняться неравенство |edи| > |edв|. В схеме будет протекать пульсирующий уравнительный ток (переменный) со средним значением Ido = 0. Для ограничения этого тока и служат дроссели L1, L2. Основным недостатком схемы является то, что она представляет собой не мостовой, а нулевой выпрямитель.
Р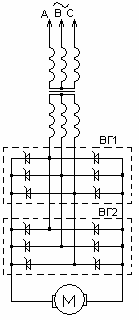 ассмотрим
РУВ с РУ. Схема представляет собой 2
трехфазных моста работающих на общую
ассмотрим
РУВ с РУ. Схема представляет собой 2
трехфазных моста работающих на общую
нагрузку разной полярности. В любой момент времени могут быть открыты тиристоры только одной из групп. При осуществлении реверса группа работающая до того в выпрямительном режиме переводится в инверторный, чем обеспечивается торможение двигателя. После того как ток спадёт до нуля (контроль за этим осуществляется при помощи датчиков проводимости вентилей) эта вентильная группа блокируется, а ВГ работавшая до того инверторном режиме переводится в выпрямительный; начинается разгон двигателя в обратном направлении.