7. Основные принципы работы генераторных датчиков.
Генераторные датчики:
а )Индукционные
датчики: Используют явление электромагнитной
индукции. К ним относятся тахогенераторы
переменного тока. Для измерения скорости
вращения применяются импульсные
индукционные датчики, у которых входной
величиной является частота следования
импульсов. Применяется для измерения
вибрации, скоростей движения и расхода
жидкости и газа. Если отверстия напротив
катушки, воздушный зазор в магнитной
цепи, увеличивается, то магнитный поток
уменьшается. За счет уменьшения Ф в
катушке появляется импульсное U, частота
следования импульсов пропорциональна
wдиска.
)Индукционные
датчики: Используют явление электромагнитной
индукции. К ним относятся тахогенераторы
переменного тока. Для измерения скорости
вращения применяются импульсные
индукционные датчики, у которых входной
величиной является частота следования
импульсов. Применяется для измерения
вибрации, скоростей движения и расхода
жидкости и газа. Если отверстия напротив
катушки, воздушный зазор в магнитной
цепи, увеличивается, то магнитный поток
уменьшается. За счет уменьшения Ф в
катушке появляется импульсное U, частота
следования импульсов пропорциональна
wдиска.
б )Термопары.
Используются для измерения высоких
температур. Состоит из двух разнородных
проводников, концы которых спаяны, а с
другой стороны снимается UВЫХ.
)Термопары.
Используются для измерения высоких
температур. Состоит из двух разнородных
проводников, концы которых спаяны, а с
другой стороны снимается UВЫХ.
Uвых= с(t2-t1), где с- коэф. пропорциональности, зависит от материала проводника. По значению Uвых определяется t0. Недостаток: большая инерционность.
в)Пьезоэлектрические датчики. Кварцевая пластина, на противоположных концах прикреплены электроды с выводами. При сжатии пластины, на её поверхности, в силу пьезоэлектрического эффекта, возникают заряды, на выводах появляется Uвых.
В еличина
заряда Q пропорциональна силе Р, Q=αP, где
α-коэффициент пропорциональности,
Uвых=Q/(Cвых+См), где Cвых- емкость датчика,
См- емкость контакта.
еличина
заряда Q пропорциональна силе Р, Q=αP, где
α-коэффициент пропорциональности,
Uвых=Q/(Cвых+См), где Cвых- емкость датчика,
См- емкость контакта.
Зная Uвых можно определить силу Р. Используются для быстропеременных процессов.
8. Автоматическое управление процессом бурения.
Процесс бурения состоит из 3-х стадий: 1. подготовительная; 2. бурение скважин – основная стадия; 3. заключительные работы.
G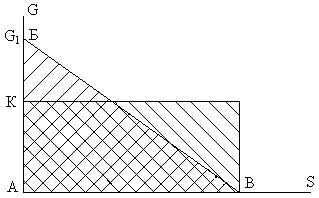 – нагрузка на долото
– нагрузка на долото
S – перемещение
АК = БК
При разовой нагрузке работа = площади АБВ.
Если начальную нагрузку оставить постоянной при в 2 раза меньшей начальной нагрузке, то работа будет такой же. Если начальную нагрузку оставить такой же, но постоянной, то работа будет в 2 раза больше.
S = k*G
k – коэффициент пропорциональности, показывающий какое перемещение инструмента приходится на единицу отклонения нагрузки на долото.
Автоматизация процесса бурения в первую очередь должна решать постоянство нагрузки.
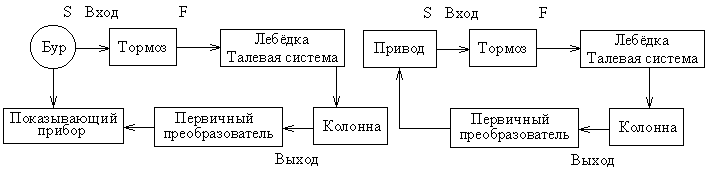
Схема ручного и автоматического управления.
С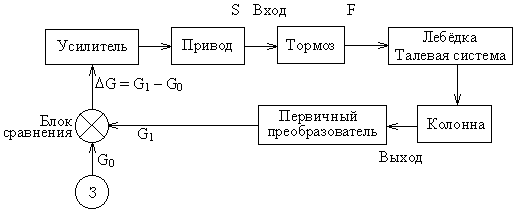 хема
автоматического управления предусматривает
привод.
хема
автоматического управления предусматривает
привод.
При ручном способе бурения бурильщик перемещает рукоятку тормоза лебёдки на величину S. При автоматическом управлении процессом бурения нагрузка F получается с помощью информации G.
Т.о. основная задача автоматизации процесса бурения заключается в обеспечении постоянства за весь период работы долота. Для этого разработаны специальные регуляторы подачи долота: РПДЭ-3, -6, -7.
РПДЭ-3 сняты с производства, т.к. мотор-генераторная группа, которая входит в состав этого регулятора, имеют очень большие габаритные размеры.
В настоящее время используют РПДЭ-7, который выполнен на тиристорных преобразователях.
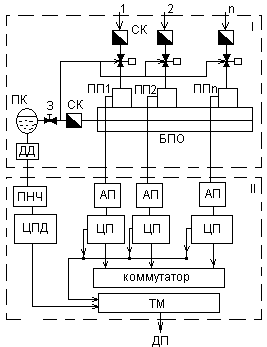
9. Автоматизированная система сбора и обработки информации о производительности нефтяных скважин. Спутник вмр - Технологическая схема.
ВМР - вибрационно-массовый расходомер, предназначен для автоматического измерения и регистрации производительности каждой из подключённых к установке скважин, а также для вычисления их суточного дебита. Система обеспечивает разделение продукции скважин по сортам, автоматическую защиту промысловых коллекторов при повышении давления, выдачу в систему телемеханики информации о суточном дебите и аварийных сигналов.
I- блок технологический; II- блок вторичных приборов и аппаратов; ПП1, ПП2, ППn- ВМР; ПЕ- приемная емкость; ПК- промысловый коллектор; ДД- дистанционный датчик давления; БПО- блок предварительной обработки; АП- аналоговый преобразователь; ЦП- цифровой преобразователь; ПНЧ- преобразователь напряжения в частоту; ЦПД- цифровой преобразователь давления.
Если за время измерений ВМР покажет дебит меньше максимального, то через ТМ на дистанционный пункт появится аварийный сигнал, что приведет к остановке скважины