

2.1.7. Керування рівнями потоків мас
Потоки мас знаходять своє застосування в харчовій промисловості, вугільних дворах, хімічних заводах і т.д. Застосовується таке встаткування, як фідери, гвинтові насоси, ковшові підйомники. Традиційно використовується двигун змінного струму з постійною швидкістю обертання з яким-небудь типом механічного регулятора швидкості. Власна швидкість механізму повинна бути такою, щоб наступний щабель потоку, такий як конвеєр, одержувала безперервну й рівномірну кількість матеріалу.
Зворотним зв'язком для потоку в цій ситуації є в основному затримка часу. Маса вихідного конвеєра приблизно пропорційна масі потоку. Однак, існує великий усереднюючий ефект завдяки довжині конвеєра. Таким чином, вихідний конвеєр повинен бути як можна більш коротким для зменшення усереднюючого ефекту. Дія регулятора швидкості повинна бути вповільнена для узгодження помилок зворотного зв'язка й для недопущення поломки регулятора. При цих умовах установка більш стабільна без якої-небудь компенсації ковзання. Така система має меншу тенденцію до «перекидання» через помилки в потоці мас.
Рис. 2.13
На мал. 2.13 показаний фідер у вигляді обертової пластини із традиційним керуванням. Двигун змінного струму з постійною швидкістю обертання приводить фідер за допомогою ремінної передачі з регульованим зазором барабанів. Переміщенням пари ближче - далі, одночасно переміщаючи іншу пару далі - ближче, можна змінювати передаточне число. Передача розроблена з таким розрахунком, щоб підтримувати постійним натяг V-Ременя. Конструкція з пасовою передачею такого типу, хоча й дозволяє регулювати швидкість безступенево, вимагає істотного механічного обслуговування.
Використання систем частотно-регульованого привода в конструкціях для переміщення мас дозволяє регулювати швидкість без використання пристроїв для механічного керування швидкістю.

Рис. 2.14
На мал. 2.14 показана та ж конструкція, але із частотно-регульованим приводом з низько-швидкісним асинхронним двигуном, прямо сполученим з валом пластини фідера. Рівень подачі може регулюватися шляхом підбору швидкості двигуна. Процес має більшу ефективність завдяки виключенню втрат тертя в пасовій передачі. На додаток, система менш піддана перевантаженням або недовантаженням. Також виключається часте обслуговування ремінної передачі описаної вище конструкції.
2.2 Аналіз енергозбереження в емс із некерованими електроприводами
Функціонально-енергетична схема ЕМС з некерованим електроприводом, зображена на рис. 2.15, має такі позначення: ЕЕ, МЕ — відповідно потоки електричної та механічної енергії; МЕО — механічна енергія, що використовується в об'єкті для виконання корисної роботи, згідно з його технологічним призначенням; ЕТП, ЕМП — відповідно електротехнічний та електромеханічний перетворювачі; ПП — передаточний пристрій; О — технологічний об'єкт (робоча машина).
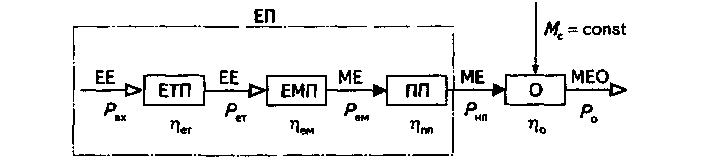
Рисунок 2.15
Енергетичні особливості кожного елемента функціональної схеми визначені коефіцієнтом корисної дії (ККД) η, який характеризує частку втрат енергії у відповідному елементі:
|
(1) |
Де Рх.вх — потужність, що надходить на вхід елемента х.
Особливістю
ЕМС із некерованими ЕП є майже стала
величина моменту
навантаження (опору) Мс
![]() сonst.
сonst.
Енергетичні рівняння ланок системи, які складають математично-енергетичну модель некерованої ЕМС, такі:
|
(2) |

З урахуванням рівнянь (2) потужність на виході об'єкта
|
(3) |
Тут ηЕМС — ККД некерованої електромеханічної системи, що визначається як добуток ККД всіх ланок, що входять до складу ЕМС:
|
(4) |
Позначивши ККД електропривода через ηЕП запишемо вираз (4) у вигляді
|
(5) |
При Мс соnst для некерованих ЕМС можна вважати, що ККД об'єкта також буде сталою величиною η0 = соnst.
Максимальне значення можна дістати у разі тривалого, некерованого режиму роботи ЕМС за рахунок зростання ККД ЕП до максимально можливого значення (ηЕП -> mах). Для цього слід:
використовувати складові ЕП із високими значеннями ККД (наприклад, застосування спеціальних типів електродвигунів із підвищеним значенням ККД). При цьому слід враховувати, що досягнення підвищеного значення номінального ККД електродвигуна приблизно на 5% потребує збільшення витрат міді та сталі до 25...30 %, що відповідно впливає на вартість двигуна;
зменшення кількості елементів у складі ЕП (наприклад, застосування безредукторних ЕП; живлення електромеханічного перетворювача безпосередньо від електричної мережі тощо).
ЕМ с некерованими ЕП більш поширені в технічно розвинутих країнах. Завдяки своїй надійності та невеликій вартості вони широко використовуються на потужних вентиляторних, насосних і транспортних установках.
Водночас при застосуванні некерованих ЕП у ході технологічного процесу можливі тривалі відхилення Мс від номінального значення, що можуть досягати десятків процентів. У цьому разі при перевантаженнях ЕП можливе спрацьовування електричного захисту, а при недовантаженнях об'єкт разом з ЕП виходить із зони номінального ККД, що спричинює додаткові витрати електричної енергії.
За значної потужності технологічних об'єктів і відповідних систем ЕП (на насосних установках великих міст можуть досягати кількох тисяч кіловат) непродуктивні втрати електричної енергії можуть бути досить суттєвими. Це, у свою чергу, може бути обґрунтуванням для застосування хоч і складніших, але економічно вигідніших ЕМС із керованими ЕП.
Нині цей напрям розвитку ЕП є пріоритетним, а широка сфера застосування некерованого ЕП постійно звужується.
Головними напрямами реконструкції ЕМС із некерованими ЕП за тривалих відхилень Мс від номінального значення можна вважати:
ступеневу зміну швидкості (для цього використовуються спеціальні асинхронні двигуни з короткозамкненим ротором і полюсоперемикальними обмотками статора, що приводить до ступеневої зміни кількості пар полюсів Р і відповідної зміни синхронної швидкості п= 60f/Р);
застосування додаткового енергозбережного пристрою (ЕЗП) у колі статора двигуна, завдяки якому електродвигун працює (при зміні Мс) у зоні максимуму ККД на новій характеристиці.
Рішення про застосування ЕЗП має бути детально обґрунтовано з урахуванням вартості пристрою, його ККД і впливу на загальні ККД ЕМС порівняно з вартістю збереженої електроенергії (самоокупність ЕЗП не повинна перевищувати 2-3 роки).
Функціональну схему розімкненої ЕМСА з ЕЗП, що містить елементи розімкненої ЕМС, наведено на рис. 2.16. Вимірювальний елемент ВП контролює зміну моменту збурення Мс і залежно від його величини відповідно діє на енергозбережний пристрій ЕЗП (або на ЕЗП', якщо функції енергозбережного елемента ЕЕ і електротехнічного перетворювача ЕТП об'єднуються в одному елементі ЕЗП).
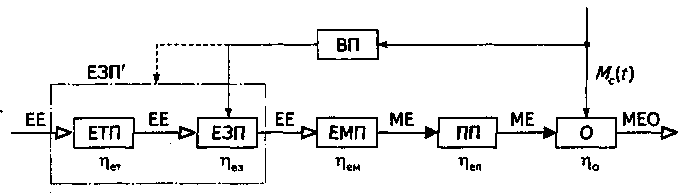
Рисунок 2.16
Величини номінальних ККД окремих пристроїв, що входять до складу ЕМС, залежать від типу, потужності та деяких особливостей сучасних елементів системи і вказані у відповідних технічних паспортах.
Наведемо деякі приблизні значення ККД головних складових ЕМС.
Електротехнічні перетворювачі. В цих перетворювачах широко використовують сучасні тиристори при різних варіантах схемних рішень. Їх ККД є досить високим і перебуває в межах 0,95...0,96.
Електромеханічні перетворювачі. Найбільші номінальні значення η за приблизно рівної величини інших параметрів (наприклад, швидкості та потужності) мають асинхронні електродвигуни з короткозамкненим ротором.
Величина ККД є такою:
для двигунів загальної серії 4А при потужності 0,55...30 кВт та номінальної швидкості п= 1000 об/хв η = 0,7...0,9;
для кранових асинхронних двигунів із короткозамкненим ротором серії MTKF при потужності 2...40 кВт та п= 1000 об/хв η = 0,6-0,82;
для двигунів потужних піднімальних машин серії АКН при потужності 800...2 000 кВт та n = 750 об/хв η = 0,935...0,948.
Передаточні пристрої. Призначені вони для узгодження швидкості валів електродвигунів та об'єктів. До передаточних пристроїв належать такі редуктори:
циліндричні та зубчасті за наявності мастил, для яких η = 0,95...0,96;
черв'ячні за однозахідного черв'яка, для яких η = 0,7...0,75; за багатозахідних черв'яків η = 0,82...0,92;
передаточні муфти, для яких η = 0,99.
Технологічні об'єкти. Для деяких із них номінальні значення ККД приблизно такі:
відцентрові насоси: при тиску до 40 кПа ηн = 0,3...0,6, при тиску понад 40 кПа ηн = 0,6...0,8;
відцентрові вентилятори: ηн = 0,4...0,6;
осьові вентилятори: ηн = 0,5...0,85;
піднімальні машини: ηн = 0,65...0,7.