

2.4 Енергозбережні системи еп з асинхронними двигунами, керованими за напругою статора
Розглянемо енергозбережну ЕМСАК з ЕП на основі асинхронного електродвигуна з короткозамкненим ротором, керованим за напругою статора при тривалому режимі роботи та навантаженні, що може повільно змінюватись.
Втрати електричної енергії в асинхронному двигуні мають магнітну ΔРСТ, електричну ΔРМ, механічну ΔРмех складові та додаткові втрати ΔРдод.
Механічна складова ΔРмех визначається втратами на тертя в підшипниках, опором повітря при обертанні ротора.
Додаткові втрати ΔРдод, зумовлені дією вищих гармонік магніторушійної сили, пульсацією магнітної індукції в зубцях магнітопроводу електродвигуна, є незначними і становлять близько 0,5% його потужності.
При вказаних особливостях роботи ЕМС можна вважати, що на час дії енергозберігаючої системи статичний момент Мс const.
Загальні (сумарні)
втрати електроенергії у двигуні
![]() можна визначити при номінальному
значенні частоти fн у
вигляді такої залежності:
можна визначити при номінальному
значенні частоти fн у
вигляді такої залежності:
|
(7) |

де ΔРстн, ΔРмн, Мн — відповідні номінальні значення магнітних втрат у сталі, електричних втрат та моменту електродвигуна; U, Uн — відповідно фактична та номінальна напруги на статорі двигуна; S, SH — відповідно фактичне та номінальне ковзання двигуна.
З наведеного виразу видно, що у зв'язку з тим, що при зменшенні величини U/Uн втрати в статі зменшуються, а в міді зростають, функція = f(U/Uн) має екстремум.
Мінімізацію витрат в електродвигуні та ЕМС в цілому в цьому разі можна забезпечити за допомогою екстремальної системи автоматичного керування побудованої на основі тиристорного перетворювача напруги (ТПН). Структурну схему такої системи наведено на рис. 2.17.
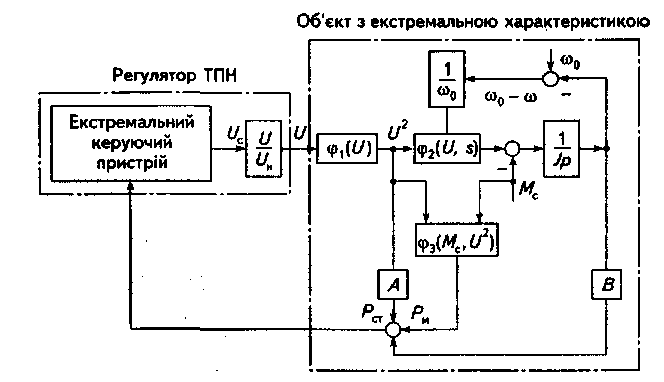
Рисунок 2.17.
Момент двигуна
|
|
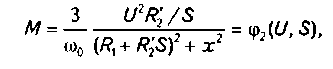
де ω0
- синхронна швидкість асинхронного
двигуна;
![]() - зведений опір ротора; R1
- активний опір статора, х
— загальний
реактивний опір статора і ротора.
- зведений опір ротора; R1
- активний опір статора, х
— загальний
реактивний опір статора і ротора.
Ковзання двигуна
|
|
Динамічний момент
|
|
На рис. 3 також позначено:
|
|

Оскільки екстремальна система забезпечує керування за мінімумом втрат електричної енергії в асинхронному двигуні, який приводить у рух технологічний об'єкт із майже сталою величиною Мс, то після його стрибкоподібної зміни електричний двигун - технологічний об'єкт можна розглядати як загальний складний енергетичний об'єкт з екстремальною характеристикою. Тиристорний перетворювач напруги вважається безінерційною ланкою.
Алгоритм
роботи екстремальної системи полягає
в тому, що спочатку регулятор подає
сигнал Uс,
який забезпечує номінальне навантаження
на статорі двигуна. Через деякий час
Δt,
достатній
для завершення перехідного процесу в
ЕМС, визначаються і запам'ятовуються
підсумкові втрати потужності
![]() ,
після
чого визначаються втрати
,
після
чого визначаються втрати
![]() ,
що
відповідають зменшенню напруги на
величину ΔU.
,
що
відповідають зменшенню напруги на
величину ΔU.
Якщо - = ΔР > 0, то система робить крок у тому ж напрямі, знаходячи відповідне значення ΔР. Якщо ΔР < 0, що означає проходження точки екстремуму, то система робить крок у зворотному напрямі.
Прийнятий алгоритм роботи системи передбачає можливість виникнення автоколивань.
Підвищення якості екстремальної системи потребує зниження частоти її кроків. Система найбільш придатна для технологічних установок, що працюють у тривалому режимі з приблизно сталим навантаженням при значній потужності, коли витрати на ускладнення схеми керування досить швидко компенсуються економією витрат електроенергії.
Прикладами таких установок можуть слугувати вентиляторні, насосні, транспортні та інші установки великої потужності з відповідним режимом роботи.