

Аналого-цифровые преобразователи.
Аналого-цифровые преобразователи (АЦП) являются устройствами, которые принимают входные аналоговые сигналы и генерируют соответствующие им цифровые сигналы, пригодные для обработки микропроцессорами и другими цифровыми устройствами.
Восьми разрядные последовательные АЦП являются и самыми дешевыми, и самыми простыми в применении. Компоненты такого типа предлагают многие производители, но до какой-либо стандартизации и унификации в этой области еще очень далеко. Расположение выводов и протоколы связи у разных типов подобных АЦП различны. Возможно, изготовители делают это для того, чтобы затруднить замену компонентов на изделия конкурентов.
8-разрядный последовательный АЦП, был выбран, с одной стороны, ввиду его широкого распространения и вполне приемлемой цены, а с другой стороны, ввиду того, что существуют 10- и 12-разрядные модели, полностью совместимые с ним по расположению выводов. При случае это может упростить проблему модернизации печатных плат.
На рисунке Б.3.19 приведена схема расположения выводов АЦП фирмы Texas Instruments.
Такой АЦП имеет только один аналоговый вход (ANALOG IN) и два входа для подключения опорного напряжения (REF+ и REF-). Вторым аналоговым входом можно считать вывод GND - общий. Если при этом вывод REF- тоже подключен к общему проводу, то на выходе АЦП будет формироваться байт выходного кода, равный 00000000 при нулевом напряжении на аналоговом входе, и 11111111 - при входном напряжении, равном опорному, которое подается на вывод REF+.
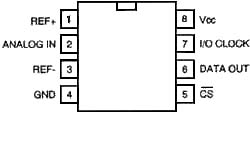
Рисунок Б.3.19 – Расположение выводов аналого-цифрового преобразователя
Протокол связи этого АЦП достаточно прост. При переходе сигнала на выводе CS от высокого к низкому уровню в регистр вывода данных помещается результат предыдущего преобразования. Поэтому рекомендуется выполнить «пустое преобразование» сразу после включения устройства или в случае выполнения двух преобразований, разделенных достаточно продолжительным интервалом времени. Первое считанное значение выходного кода в этих случаях будет неверным. Следующее преобразование будет правильным, оно начнется по первому переднему фронту импульса, поступившего на вывод CS после низкого уровня. Важно, чтобы на выводе CS был высокий уровень в течение всего времени преобразования, но, поскольку этот процесс длится всего несколько десятков микросекунд, данное условие можно считать автоматически выполняемым, если АЦП управляется процессором с программой, написанной на существенно менее быстром языке, чем Assembler.
Каждый бит выходных данных может быть считан на выводе DATA OUT, причем биты выводятся старшими разрядами (MSB) вперед по переднему фронту импульсов на выводе I/O CLOCK.
Одно из преимуществ этого АЦП состоит в том, что он может работать с любой частотой дискретизации, определяемой управляющей системой, - от одного измерения за несколько часов до двадцати тысяч измерений в секунду [17].
Проектирование принципиальной схемы аналого-цифрового преобразователя.
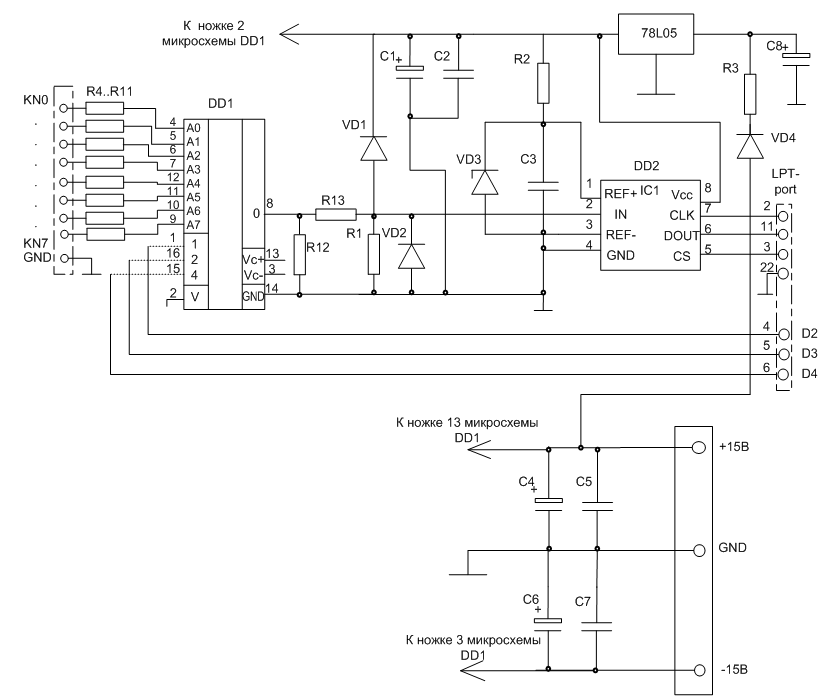
Основными элементами аналого-цифрового преобразователя являются микросхемы коммутатора. Принципиальная схема устройства представлена на рисунке Б.3.20.
 Рисунок
Б.3.20 – Принципиальная схема АЦП
Рисунок
Б.3.20 – Принципиальная схема АЦП
Перечень элементов принципиальной схемы АЦП представлен в таблице Б.3.11.
Таблица Б.3.11 – Перечень элементов схемы АЦП
Поз. Обозначение |
Наименование |
Коли- чество |
Примечание |
1 |
2 |
3 |
4 |
DD1 |
Коммутатор |
1 |
|
DD2 |
АЦП |
1 |
|
Z1 |
Стабилитрон |
1 |
|
R4-R11 |
|
8 |
|
R13 |
|
1 |
|
R1 |
|
1 |
|
R2 |
|
1 |
570-610 Ом |
R3 |
|
1 |
|
R12 |
|
1 |
|
VD1 |
|
1 |
|
VD2 |
|
1 |
|
VD3 |
|
1 |
|
VD4 |
|
1 |
|
C2, C3, C5, C7 |
|
4 |
|
C1+ |
|
1 |
|
C4+ |
|
1 |
|
C6+ |
|
1 |
|
C8+ |
|
1 |
|
Описание работы проектируемого устройства.
Коммутатор постоянно находится в режиме разрешения коммутации. На его адресные входы 1,16,15 подаются управляющие сигналы D2, D3, D4. Таким образом выбирается один из восьми каналов на выход 8. Выход коммутатора соединен со входом АЦП. На CS подается сигнал с D1, разрешающий начало преобразования. После этого через D0 подаются сигналы синхронизации и через DATA OUT считываются биты полученного значения начиная со старшего. В дальнейшем процедура повторяется для других каналов.
Так как опорное напряжение на АЦП должно составлять 2,5 вольта, а диоды под такое напряжение встречаются довольно редко, было решено использовать диод VD3 на 2,7В. Для обеспечения требуемого опорного напряжения дополнительно с диодом используется резистор R2 (470-610 Ом). Совместно сопротивления R1 и R13 подобраны таким образом, чтобы уменьшить входное напряжение в два раза. Для защиты АЦП (в случае смены полярности на блоке питания) предусмотрен диод VD4. Для этой же цели служат диоды VD1 и VD2. Если полярность на входе коммутатора будет по ошибке перепутана, АЦП останется неповрежденным, а на его выходе сформируется ноль. Резистор R12 уменьшает взаимное влияние каналов друг на друга. Чтобы ослабить низко и высокочастотные колебания в цепи, используются электролитические и обычные конденсаторы. Конденсатор С3 служит для сглаживания опорного напряжения.
Проектирование блока питания.
Для питания удаленного контроллера и преобразователя уровня необходимы внешние источники питания. При проектировании блоков питания за основу были взяты типовые схемы. Блок питания контроллера представлен на рисунке Б.3.21. Он обеспечивает три напряжения:
– для питания линии связи - Х В;
– для питания микроЭВМ - Х В;
– для питания аналоговых коммутаторов - Х В.
Блок питания выполнен на основе промышленного трансформатора ТСО - 5,6. Для питания микроЭВМ необходим стабилизированный источник напряжения. Отечественной промышленностью выпускается специализированная серия стабилизаторов К142, которые характеризуются рядом электрических параметров. Далее приведены наиболее важные из них.
Максимальное (минимальное) входное напряжение Uвх наибольшее (наименьшее) входное напряжение, при котором обеспечиваются заданные значения параметров стабилизатора.

Рисунок Б.3.21 Схема блока питания контроллера
Номинальное выходное напряжение Uвых заданное значение напряжения конкретного стабилизатора. Для регулируемых стабилизаторов напряжения нормируют верхний (нижний) предел регулировки выходного напряжения наибольшее (наименьшее) значение выходного напряжения, при котором обеспечиваются заданные значения параметров стабилизатора.
Ток потерь Iп разность между токами на входе и выходе стабилизатора.
Допустимый разброс выходного напряжения наибольшее значение отклонения выходного напряжения от номинального.
Нестабильность по напряжению относительное изменение выходного напряжения стабилизатора, при заданном изменении входного напряжения, приведенное к изменению входного напряжения на 1 В. Часто, вместо указанного параметра используют коэффициент нестабильности по напряжению dKu, определяемый, как отношение относительного изменения выходного напряжения к вызвавшему его относительному изменению входного напряжения.
Нестабильность по току относительное изменение выходного напряжения стабилизатора, при заданном изменении выходного тока. Вместо указанного параметра часто используется коэффициент нестабильности по току dKi, определяемый, как отношение относительного изменения выходного напряжения к вызвавшему его относительному изменению тока нагрузки.
Напряжение шумов Uш действующее значение выходного напряжения шумов стабилизатора в заданном режиме и в заданном диапазоне частот.
Рассеиваемая мощность Pрас.
В данной разработке был использован стабилизатор (зарубежный аналог 78L05), который отвечает всем требованиям микроЭВМ. Также возможно использование стабилизатора, который обеспечивает напряжение 6 В, но тогда микроЭВМ будет работать с перегрузкой и срок его службы уменьшится.
Блок питания преобразователя уровня представлен на рисунке Б.3.22. Блок питания преобразователя уровня обеспечивает два напряжения:
– для обеспечения стандарта RS232C - Х В;
– для питания линии связи - Х В.
Схема выполнена на основе промышленного трансформатора ТПП - 220/50. Выпрямление напряжения осуществляется по однополупериодной схеме (12 В) и по двухполупериодной схеме (27 В). Так как вторичные обмотки выдают напряжения больше нужного, то необходимым стало применение стабилизаторов на стабилитронах. Вместо стабилитронов КС512А можно использовать КС510А, так как напряжение стабилизации Uстаб = 10 В, что также соответствует стандарту RS232C.
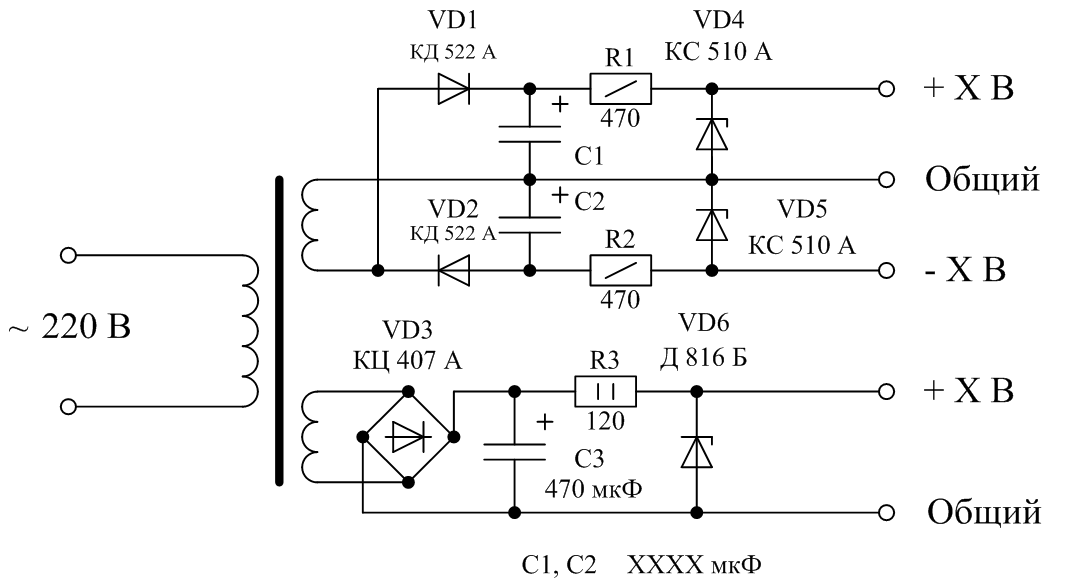
Рисунок Б.3.22 Схема блока питания преобразователя уровня
Разработка программного обеспечения.
Основная задача, которую должна реализовать программа для ОПС - это получать данные от АЦП и обрабатывать их. То есть программно осуществлять передачу управляющих сигналов от ЭВМ для выбора каналов и разрешения преобразования, а также принимать преобразованные значения в ЭВМ.
Данные, принимаемые из АЦП в ЭВМ необходимо анализировать, и при необходимости сохранять в файл.
Работа пользователя с программой должна осуществляться посредством удобного интерфейса.
Укрупненная схема алгоритма программы.
На рисунке Б.3.23 показана укрупненная схема алгоритма программы, а на рисунке Б.3.24 схема алгоритма в режиме «Эмуляция работы».
Рисунок Б.3.23 – Укрупненная схема алгоритма программы
Рисунок Б.3.24 – Схема алгоритма модуля «Эмуляция работы»
Функция adcReadLpt. Входным параметром является базовый адрес порта, а выходным – код напряжения аналогового сигнала. Служит для получения цифрового кода входного аналогового сигнала.
Процедура BitBtn1Click. Запускает работу таймера, по событию которого запускается процедура Grafik. Деактивирует элементы на форме, которые не участвуют в процессе преобразования, либо элементы, изменение значений которых во время работы программы может привести к ошибке.
Процедура BitBtn2Click. Останавливает работу таймера. Если файл был открыт для записи – закрывает его.
Процедура CheckBox2Click. Открывает диалог создания файла. Открывает файл для записи.
Процедура BitBtn3Click. Завершает работу программы, закрывает файл, если он был открыт для записи.
Процедура Button2Click. Открывает диалог чтения файла. Открывает файл для чтения. Загружает данные из файла в TChart – построение графика.
Процедура Button3Click. Очищает форму, приводит ее в первоначальный вид.
Процедуры TrackBarChange и Edit2Change выполняют одну функцию – установка интервала работы TTimer.
2