

Лекція 10
Тема: Програмовані| пристрої керування (мікроконтролери) (PLC).
Будова|споруди| |і/або|і принци|основа|п дії.
Програмування, мови програмування, будова програми.
Базові функції, логічні функції.
Тригери |SR i RS.
Операції введення|установлювати| і|і/або| передавання.
Детектування фронту сигналу.
Таймери, лічильники.
Програмування секвенційного керування на основі методу Grafcet.
Структура і|і/або| опис|опис| процесу та програми керування.
Будова|споруди| |і/або|і принци|основа|п дії.
Б
Рис.
10.1.
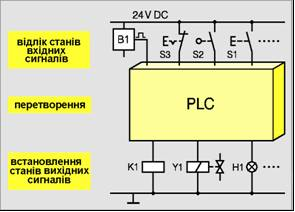
Структура
програмованої
системи
керування
Рис.
10.2.
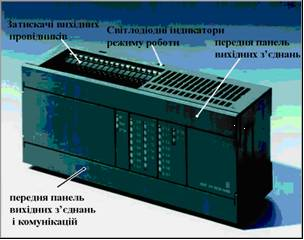
Мікрокерувальний
пристрій
PLC
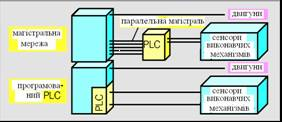
Програмований пристрій керування може бути також інтегрований з іншою системою цифрового (мікропроцесорного) керування, наприклад, з комп'ютерним пристроєм цифрового керування CNC (ang. Computer Numerical Control). У цьому випадку програмований пристрій активізуватиметься програмою контролера CNC (рис. 10.4). Якщо потрібні тільки окремі функції програмованого пристрою, то найчастіше з операційною системою контролера CNC інтегруються тільки відповідні модулі програмного забезпечення. Все частіше також, поряд з використанням комп'ютерів типу РС1 для програмування пристроїв керування і для складання документації програм, а також з впровадженням апаратних і програмних рішень, застосовуваних в комп'ютерах для систем керування, для реалізації завдань програмованого пристрою керування використовуються промислові комп'ютери (рис. 10.5). У цьому випадку можливим є або використання промислового комп'ютера з програмним забезпеченням PLC, або використання в комп'ютері карт розширень типу PLC.
Програмовані пристрої керування PLC зустрічаються у вигляді: компактному, модульному, об’єднаному з допомогою мережі, інтегрованому з іншими пристроями керування і у вигляді промислового комп'ютера.
Рис.
10.3.
Мережа
пристроїв керування
Рис.
10.4.
Інтегрований
пристрій
програмованого
керування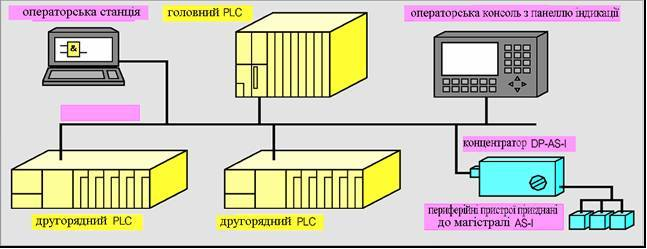
М
Рис.
10.5.
Промисловий
комп’ютер

Щоб не втратити даних з пам'яті під час аварії живлення, передбачені батареї або акумулятори.
Я
Рис.
10.6.
Модульний пристрій
програмованого
керування
Рис.
10.7.
Головний щит вузла
центрального
CPU

Через інтерфейс магістралі PROFIBUS-DP модуль CPU підтримує зв'язок з іншими модулями, які називаються периферійними.
Системні показники інформують про даний стан роботи модуля CPU. При вказівці SF або SF DP з модуля контролера можна отримати точну інформацію про вид допущеної помилки. Центральний модуль - це є мікропроцесор, а також різні види пам'яті - пам'ять даних, робоча і системна, з'єднані між собою шинами пристрою керування.
В пам'яті даних пристрою керування зберігаються дані і інструкції програми користувача (рис. 10.8). Пам’ять типу RAМ або EPROM можна розширити за допомогою додаткових карт або модулів пам'яті. Якщо карта оснащена пам'яттю EPROM, програма користувача може бути завантажена в неї в режимі off-line, що захищає її від втрат під час аварії живлення. Робоча пам'ять є швидкою, типу RAМ. Дані копіюються до неї в процесі роботи програми користувача. Системна пам'ять зберігає змінні, які називають також операндами, за якими виконуються операції програми. Змінні ці зібрані в масиви, які називають масивами операндів. Розмір цих масивів залежить від застосованого CPU.
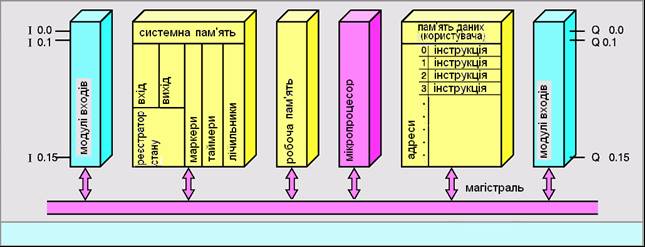
Рис. 10.8. Внутрішня будова пристрою керування PLC
О
Рис.
10.9.
Перетворення
програми
керування
вхідні змінні, входи (І, англ. Input) – аргументи програмного перетворення, які надходять від вхідних модулів,
вихідні змінні, виходи (Q, з англ. quit = вихід) - аргументи, застосовані для повернення результатів програмного перетворення, здійснених модулями виходів,
змінні-мітки, маркери (М, aнгл. Маркер – людина яка робить відмітки під час гри) - внутрішні змінні, які інформують про стан роботи,
• часові змінні (T, aнгл. Тimer) - генеровані функціональними блоками, використовуються для здійснення часових умов або відмірювання часу
•
Рис.
10.10.
Схема
підключень входів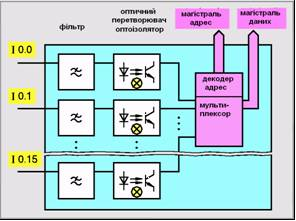
В стані вводу (RUN) програма користувача виконується циклічно (рис. 10.9.). Спочатку з системної пам'яті читається інформація про актуальний стан вхідних змінних. Потім виконується відповідна до програми користувача робота. Результатом виконання програми є новий стан вихідних змінних, які запам'яталися в системній пам'яті і подані на відповідні виходи пристрою керування. По черзі наступає актуалізація стану вхідних змінних, виконання програми, повернення результату і т.д. Час такого одиничного перебігу називають часом циклу. Цей час тим більший, чим довша є програма споживача. Він залежить також від швидкості роботи використовуваного CPU. Переважно становить декілька мілісекунд.
Вхідна частина пристрою керування поділена на модулі, що мають переважно по 8, 16 або 32 двійкові входи (рис. 10.10). Модуль входів містить електронні системи, які змінюють сигнали, що надходять із зовнішніх пристроїв, на логічні сигнали, адаптовані до пристрою керування. Це можуть бути подільники напруги з додатковими фільтрами RC для гасіння завад. Модулі входів постійного струму оснащені додатково діодами для збереження відповідної полярності (найчастіше додатної, яку називають ще „зі спільним плюсом"), а модулі входів змінного струму – мостовими схемами випрямлення. Для ізоляції від високих потенціалів (гальванічної розв’язки) вхідних кіл і магістралі пристрою керування, застосовують оптичні прилади – оптопари (фотодіод як передавач і фототранзистор як приймач в одному елементі, так званий оптоізолятор). Про стан окремих бітів буфера даних вхідного модуля сигналізують світлодіоди типу LED – що дозволяє швидку ідентифікацію стану входів в тракті введення в дію пристрою керування або в процесі пошуку помилок. Мультиплексер (розділювач) керується через декодер адрес.
В
Рис.
10.11.
Схема
підключень виходів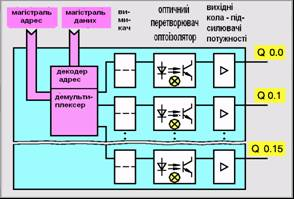
У випадку завад перетворення програми користувача, модулі виходів після закінчення даного циклу перетворення переривають керування приєднаними вихідними колами, до яких під’єднані виконавчі пристрої – це запобігає від небезпечних наслідків аварії.
Стан окремих виходів модуля визначає демультиплексер, керований CPU пристрою керування. У декодері адреса вибраного мікропроцесором виходу і відповідне двійкове значення, пересилається з магістралі даних демультиплексером до вихідних систем модуля.