

4. Расчет передаточного отношения редуктора
Момент, получаемый с привода, мал для работы робота при необходимых параметрах, и , так как скорость работы устройства для нас не является критичной, мы ставим еще один модуль, а именно редуктор.
Выберем редуктор схема, которого представлена на рис. 4.1. Данный редуктор взят с серводвигателя и является стандартным для данной модели. Он был выбран потому, что толщина корпуса практически идентична толщине двигателя(отличие в 0.5 мм). Это позволит легко установить двигатель и редуктор соосно.
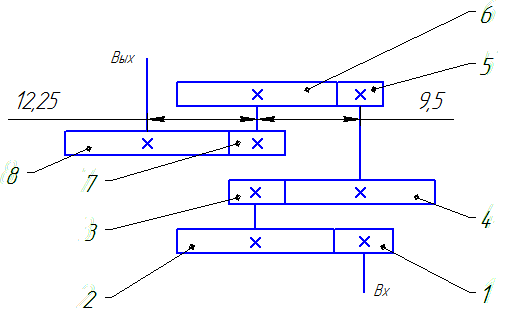
Рис. 4.1. Схема редуктора
Редуктор был отделен от двигателя, и были измерены опытным путем следующие характеристики:
z1=10 b1=2.5 d1=3.5
z2=50 b2=1 d2=15.5
z3=8 b3=1.5 d3=4
z4=37 b4=1 d4=15
z5=10 b5=1.5 d5=5
z6=35 b6=1 d6=14.5
z7=16 b7=3.5 d7=7.5
z8=35 b8=3.5 d8=17
где z - число зубьев, b - толщина венца (мм), d - диаметр зубчатого колеса (мм).
Диаметра валов: dвала=1.5 мм.
Зная число зубьев каждой шестерни мы легко можем определить передаточные отношения каждой ступени. Как видно из схемы (рис. 4.1) число ступеней равно 4.




Зная передаточные числа каждой ступени, мы можем получить общее передаточное отношение редуктора.

5. Построение 3d-моделей и чертежей
В ходе преддипломной практики была разработана следующая модель прыгающего робота (рис. 5.1, рис. 5.2).

Рис. 5.1 3D-модель прыгающего робота: 1 - двигатель; 2 - редуктор; 3 - стойка; 4 - ножка; 5 - верхнее крепление ножки; 6 - вал ролика; 7 - кулачек; 8 - подшипник; 9 - основание; 10 - нижнее крепление ножки; 11 - поворотный механизм стопы; 12 - стопа.

Рис. 5.2 3D-модель робота
Модель привода
Была построена 3D-модель серводвигателя идентичная оригиналу по габаритным размерам. Привод представлен на рис. 5.3.

Рис. 5.3 3D-модель привода
Модель редуктора
Была построена 3D-модель редуктора идентичная оригиналу по габаритным размерам. привод представлен на рис. 5.4.

Рис. 5.4 3D-модель редуктора
Модель стойки
Была сконструирована стойка (рис. 5.5).

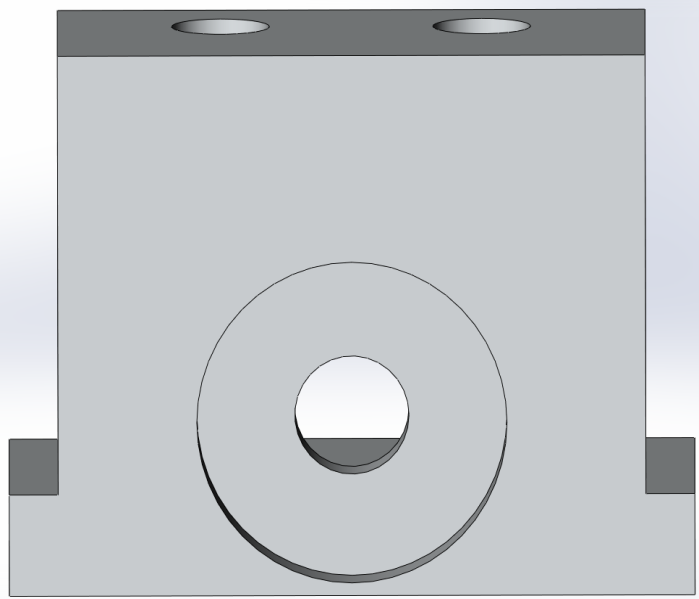
Рис. 5.5 3D-модель стойки
Модель верхнего крепления ножек
Было сконструировано верхнее крепление ножек (рис. 5.6).
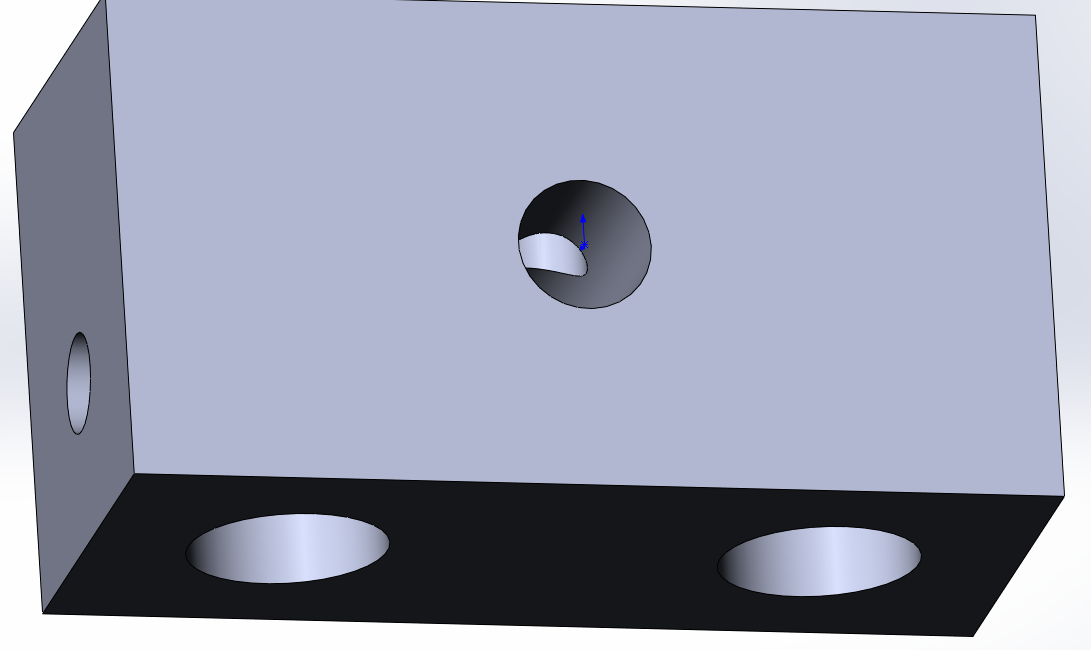
Рис. 5.6 3D-модель верхнего крепления ножек
Модель и чертеж нижнего крепления ножек
Было сконструировано нижнее крепление ножек 3D-модель, которой представлена на рис. 5.7, а чертеж - на рис. 5.8.

Рис. 5.7 3D-модель нижнего крепления ножек

Рис. 5.8 Чертеж нижнего крепления ножек
Модель поворотного механизма стопы
Был сконструирован поворотный механизм стопы (рис. 5.9).

Рис. 5.9 3D-модель поворотного механизма стопы
Заключение
В ходе прохождения преддипломной практики на НОЦ "Мехатроника и микросистемная техника" было проведено исследование силовых характеристик канцелярской резинки, опытным путем определенны габаритные характеристики и размеры всех его составляющих. Так же был спроектирован двуногий прыгающий робот с пружинным накопителем энергии, полученна его 3D-модель и чертежи некоторых его компонентов