

15. Сельсин. Устройство, принцип действия, реж. Раб. Хар-ки упр.
Сельсин представляет собой электрическую микромашину переменного тока, имеющую две обмотки: возбуждения и синхронизации. В зависимости от числа фаз обмотки возбуждения различают одно- и трехфазные сельсины. Обмотка синхронизации всегда трехфазная. В САУ широкое распространение получили бесконтактные сельсины с кольцевым трансформатором.
О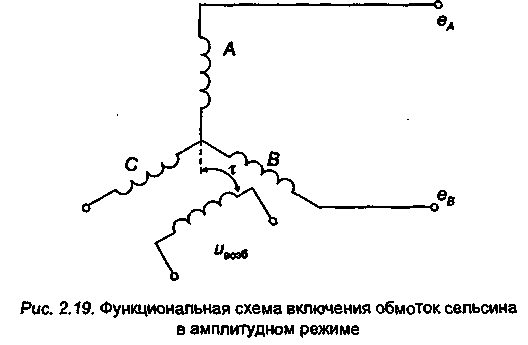 бмотка
синхронизации бесконтактного сельсина
с кольцевым
трансформатором размещается в пазах
статора, обмотка возбуждения
— в пазах или на явно выраженных полюсах
ротора сельсина.
Особенность кольцевого трансформатора
состоит в том, что
его первичная обмотка располагается
на статоре, а вторичная — на
роторе. Обмотки имеют вид колец,
размещенных в магнитной системе,
состоящей из кольцевых магнитопроводов
статора и роора,
которые на роторе соединяются внутренним
магнитопроводом, а на статоре — внешним.
В САУ сельсины используются в
амплитудном и фазовращательном режимах.
бмотка
синхронизации бесконтактного сельсина
с кольцевым
трансформатором размещается в пазах
статора, обмотка возбуждения
— в пазах или на явно выраженных полюсах
ротора сельсина.
Особенность кольцевого трансформатора
состоит в том, что
его первичная обмотка располагается
на статоре, а вторичная — на
роторе. Обмотки имеют вид колец,
размещенных в магнитной системе,
состоящей из кольцевых магнитопроводов
статора и роора,
которые на роторе соединяются внутренним
магнитопроводом, а на статоре — внешним.
В САУ сельсины используются в
амплитудном и фазовращательном режимах.
Схема включения обмоток сельсина в амплитудном режиме представлена на рис. 2.19. Входной координатой сельсина в этом режиме является угол поворота ротора τ. За начало отсчета принята осевая линия обмотки фазы А.
При
подаче на обмотку возбуждения переменного
напряжения
uвозб
= Uвозб
max
sin
ωt
возникает пульсирующий магнитный поток,
действующий по осевой линии обмотки
возбуждения. При
этом в фазах обмотки синхронизации
наводятся ЭДС той же частоты, амплитуды
которых изменяются в зависимости от
угла поворота ротора относительно
статора, а фазы выходных напряжений
неизменны. При отклонении ротора на
угол т ЭДС фазных
обмоток соответственно равны: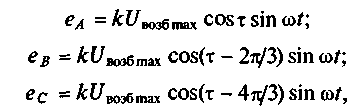 где
к
—
коэффициент трансформации между
статорной и роторной
обмотками при их соосном положении.
где
к
—
коэффициент трансформации между
статорной и роторной
обмотками при их соосном положении.
С хема
включения обмоток сельсина в
фазовращательном режиме
представлена на рис. 2.20. Входной
координатой сельсина в
этом режиме является угол поворота т,
а выходной — фаза φ выходной ЭДС евьа
по
отношению к переменному питающему
напряжению.
Обмотка синхронизации получает питание
от источника
трехфазного напряжения с неизменной
амплитудой. Образующееся
вращающееся магнитное поле наводит в
обмотке ротора,
ось которой сдвинута на угол т относительно
начала отсчета,
ЭДС
хема
включения обмоток сельсина в
фазовращательном режиме
представлена на рис. 2.20. Входной
координатой сельсина в
этом режиме является угол поворота т,
а выходной — фаза φ выходной ЭДС евьа
по
отношению к переменному питающему
напряжению.
Обмотка синхронизации получает питание
от источника
трехфазного напряжения с неизменной
амплитудой. Образующееся
вращающееся магнитное поле наводит в
обмотке ротора,
ось которой сдвинута на угол т относительно
начала отсчета,
ЭДС
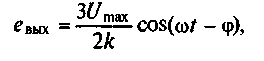
Амплитуда и частота ЭДС евых не зависят от угла поворота τ ротора сельсина. Угловое положение ротора влияет только на временную фазу φ этой ЭДС. Поскольку число пар полюсов ротора и статора сельсинов в большинстве случаев равно единице, то значение временной фазы φ численно равно угловому перемещению τ ротора сельсина, выраженному в градусах.
16. Электромеханические и механические характеристики системы "однофазный полууправляемый выпрямитель - двигатель постоянного тока" в режиме непрерывного тока.
Р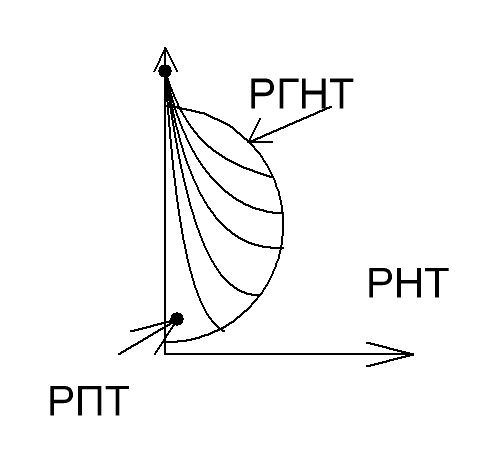 ассмотрим
характеристики для РНТ.
ассмотрим
характеристики для РНТ.



 ;
;

17. Электромеханические и механические характеристики системы "однофазный полууправляемый выпрямитель - двигатель постоянного тока" в режиме прерывистого тока.
Г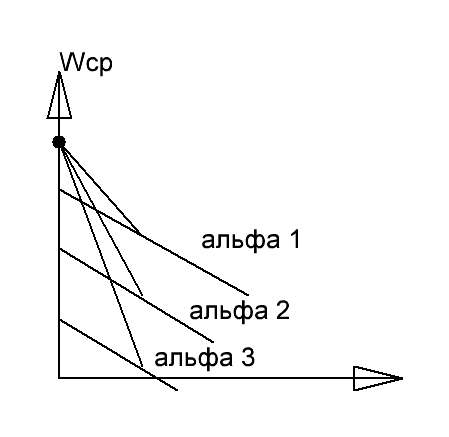 раница
РГНТ определяется по формуле:
раница
РГНТ определяется по формуле:
 ,
где
,
где - фазовый угол, определяемый параметрами
схемы.
- фазовый угол, определяемый параметрами
схемы.

К ак и для управляемого выпрямителя в данном случае характеристика эл.мех. и мех. в РПТ не линейна, поэтому по приведенным формулам определяются точки пересечения характеристик для РНТ и эти точки соединяются с точками ω0 для соответствующих углов α. В следствии наличия РПТ, который обусловлен пульсирующим характером выходного напряжения, скорость двигателя возрастает, т.е. в РПТ выпрямитель теряет свою управляемость и для обеспечения работы необходимо ввести связь по скорости или ЭДС якоря. Из-за наличия в схеме шунтирующих диодов данная система ЭП может работать лишь в двигательном режиме.