

Формулировка задачи условной оптимизации с ограничениями.
Задача
общего вида: Минимизировать f(x)
при ограничениях hk(x)=0,
где k=1,2,…,k;
gj(x)>=0
j=1,2,…,j ;
![]()
функция f(x) называется целевой функцией, уравнение вида hk(x)=0 называется ограничением в виде равенств, - ограничения сверху и снизу, а g(x)>=0 ограничением в виде неравенств.
Задача, в которой присутствуют ограничения j, k,
называется оптимизационной задачей с ограничениями или задачей условной оптимизации с ограничениями.
Классификация:
1)Если ограничения заданы линейными функциями, то независимо от вида целевой функции, задача называется оптимизационной задачей с линейными ограничениями.
2)Если задача содержит линейную целевую функцию, то она будет задачей линейного программирования.
3)Задачи, в котор. компоненты вектора X принимают только целые значения, называется задачей целочисленного программирования.
4)Задача с нелинейной целевой функцией f(x) и линейными ограничениями называется задачей нелин. программирования с линейными ограничениями.
5)f(x) – квадратичная -> задача квадратичного программирования.
6)f(x) задана отношением линейных функций -> задача дробно-линейного программирования.
Формулировка задачи условной оптимизации с ограничениями.
f(x) – цел.ф-ция (Крит. опт-ции)
hk(x)=0 – ограничения в виде неравенств
gj(x) – ограничения в виде неравенств.
Предполагается что все ф-ции вещественные, а число ограничений конечно.
Задача с ограничениями (усл. опт-ции):
Минимиз-ть
ф-цию f(x)
при ограничениях:![]()
Формулировка задачи безусловной оптимизации.
Все задачи оптимизации м. классифицировать, как задачи min некой веществ-ой целевой ф-ии f(x) некоего N-мерного вектора-аргумента X=(x1,x2..xn) компоненты которого удовлетворяют системе уравнений hk(x)=0 и набору нерав-тв qi(x)≤0 , а также ограниченное сверху и снизу Xjв≥Xj≥Xjн.
hk(x)=0 – ограничение в виде равенств; qi(x)≤0 – огр. в виде неравенств.
Задачи в которых ограничения отсутствуют j=k=0 и Xjв= -Xjн= ∞ при
j=1,2...N – называются оптимизац-ми задачами без ограничений или задачами безусловной оптимизации.
Формулировка задачи безусловной оптимизации.
f(x) – цел.ф-ция (Крит. опт-ции)
hk(x)=0 – ограничения в виде неравенств
gj(x) – ограничения в виде неравенств.
Задача
без ограничений (безусл. опт-ции):
минимиз-ть ф-цию f(x)
при отсутсвии ограничений, если k=j=0
и
![]() ,
где i=1,2,…N.
,
где i=1,2,…N.
Задачи оценки состояния системы, общие сведения об эстиматорах.
Известная с-а рассматр-ся с учетом случайных вх. воздействий (шумов) W(t) и шумов измерения V(t) так, что измеренный вых. cигнал Z(t) предст. собой искаженное сост-е с-ы, при этом задача предст-ся след. образом (рис.)
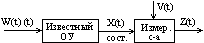
В этом сл. д.б.
известны з-ны распредел-я шума с-ы или
устр-ва W(t)
и шума измерений V(t).
При этом треб-ся найти «наилучшую» или
оптимальную оценку в-ра сост-я с-ы
![]() истинного
сост-я с-ы X(t)
по известному знач-ю наблюдаемого сост-я
с-ы Z(t).
истинного
сост-я с-ы X(t)
по известному знач-ю наблюдаемого сост-я
с-ы Z(t).
В реал. с-ах не
всегда возможно получение новой инф-и
о в-ре сост-я с-ы, рассмотрим более сложный
вариант построения инженерной оптимизации
с-ы при отсутствии полной инф-и о в-ре
сост-я с-ы, заменив его предположением
о возмож-ти относит-но точного измерения
в-ра отклика с-ы Y(t)
= CX(t) в любой
момент времени t ≥ 0. Будем
считать, что в-р сост-я с-ы X(t)
опр-ся как пеш-е ур-ий (**)
(**)
Тогда м.б. построено
устр-во, называемое с-ой асимптотической
оценки или эстиматором, исп-щим в кач-ве
вх. воздействий измеряемый в-р отклика
объекта Y=CX(t)
и его вход U(t),
и вырабатывающее оценку в-ра сост-я с-ы
![]() как реш-е ур-я след. вида:
как реш-е ур-я след. вида:
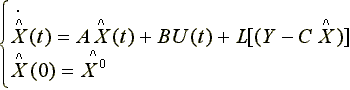 (*)
(*)
![]() ,
причемпри усл-и невырожденности матр-цы
с-ы АТ, СТ
,
причемпри усл-и невырожденности матр-цы
с-ы АТ, СТ
rank| СТ | АТСТ | (АТ)2, СТ…| = n (условие наблюдаемости по Калману) в выраж-и (*) матр. L м.б. выбрана так, что ошибка оценивания в-ра сост-я
![]() , (
, (![]() - коорд. в-ра сост-я)
- коорд. в-ра сост-я)
будет стремиться
к нулю, если t → ∞ при
любой ограниченной начальной ошибке
в-ра сост-я. Д/док-ва этого высказывания
необх. вычесть ур-е (*) из ур-я (**), тогда
получим ур-е, определяющее изменение
ошибки оценивания т.о.:
![]() из этого выраж-я следует, чтобы ошибка
→ 0, достаточно выбрать матр. L
так, чтобы матр. (A – LC)
имела «хорошие» (оптим.) собств. числа,
однако они совпадают с собств. числами
транспонированной матр. (АT
– LT
CT),
если вып-ся усл-е наблюдаемости, т.е
матрицы АТ, СТ, А, С не
особенные, то задача выбора матр. L
или LT
отлич-ся от рассмотреннойзадачи
размещения собств чисел матр. (А – В К)
лишь обозначением, а именно, заменой
матр. А на АТ, К на LT,
В на CT
и разрешима с пом. алг-ов ужеописанных
ранее д/невырожд. Пары матриц АТ,
CT.
из этого выраж-я следует, чтобы ошибка
→ 0, достаточно выбрать матр. L
так, чтобы матр. (A – LC)
имела «хорошие» (оптим.) собств. числа,
однако они совпадают с собств. числами
транспонированной матр. (АT
– LT
CT),
если вып-ся усл-е наблюдаемости, т.е
матрицы АТ, СТ, А, С не
особенные, то задача выбора матр. L
или LT
отлич-ся от рассмотреннойзадачи
размещения собств чисел матр. (А – В К)
лишь обозначением, а именно, заменой
матр. А на АТ, К на LT,
В на CT
и разрешима с пом. алг-ов ужеописанных
ранее д/невырожд. Пары матриц АТ,
CT.
Если пара матриц АТ и CT вырождена, т.е.усл-е наблюдаемости не вып-ся, но ненаблюдаемая с-а устойчива, представленные выше ф-лы о возм-ти построения д/этой с-ы устр-ва асимптотической оценки остаются в силе, при этом говорят, что такая с-а будет явл-ся обнаруживаемой (детектируемой).
Д/реал. с-м при
построении с-ы оценки исп-ют те же матр.
А, В, С, что и в описании оптимизируемой
с-ы и вводят то же самое внешнее воздействие
U(t). Поэтому,
если нач. условия в-ра сост-ий с-ы Х(0)
= Х0 и нач. условия оценки в-ра
сост-ий с-ы
![]() совпадают, то вовпадают и дальнейшие
траектории в-ра сост. и оценки в-ра сост.
при всех t > 0. Т.е. с-а
оценки объекта работает как модель
этого объекта, при этом главное достоинство
с-ы оценки б. заключ-ся в том, что она
позвол. оценивать изменение сост-я
объекта и тогда, когда его начальное
сост-е неизв. Именно д/этой цели служит
последнее слагаемое в выражении (*),
вводящее в с-у оценки сигнал ОС,
пропорциональный разности м/д истинным
непосредственно измеренным выходом
с-ы Y(t) и его
прогнозом
совпадают, то вовпадают и дальнейшие
траектории в-ра сост. и оценки в-ра сост.
при всех t > 0. Т.е. с-а
оценки объекта работает как модель
этого объекта, при этом главное достоинство
с-ы оценки б. заключ-ся в том, что она
позвол. оценивать изменение сост-я
объекта и тогда, когда его начальное
сост-е неизв. Именно д/этой цели служит
последнее слагаемое в выражении (*),
вводящее в с-у оценки сигнал ОС,
пропорциональный разности м/д истинным
непосредственно измеренным выходом
с-ы Y(t) и его
прогнозом
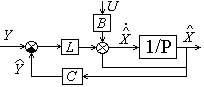
![]() т.е.:
т.е.:
![]() (*)
(*)
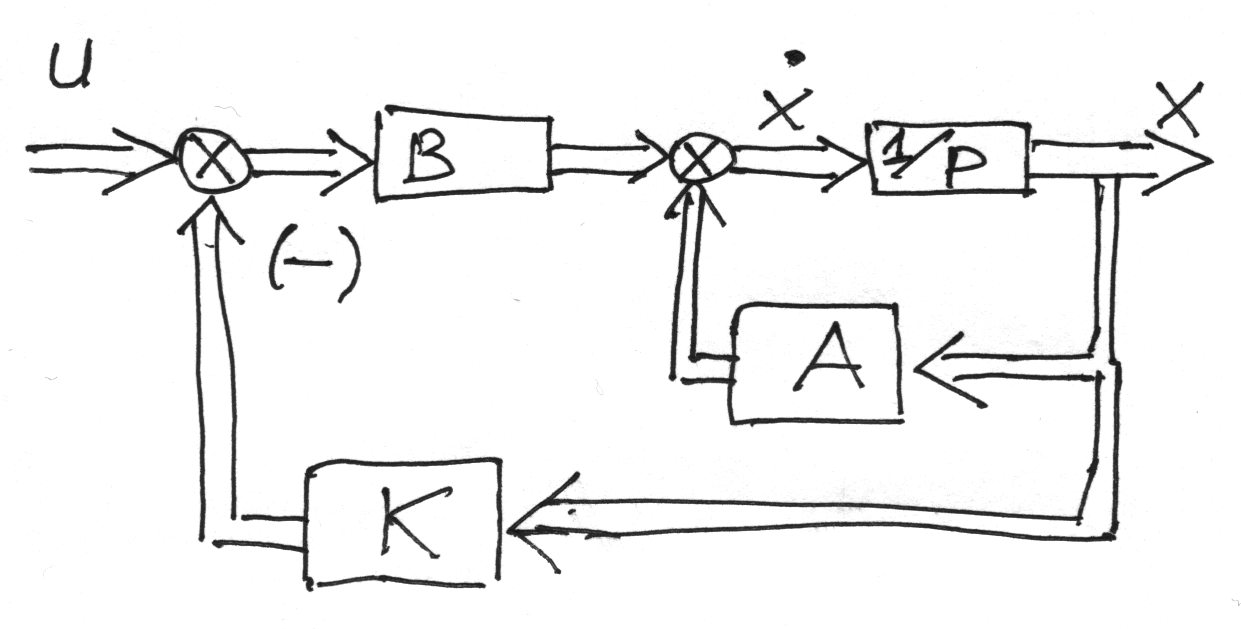
опр-ет стр-ру строгореализуемого с пом. стандартных типовых блоков (интеграторы и усилители) устр-ва асимптотич. оценки (эстиматора). Схема эстиматора:
Если мат. м-ль ОУ задана в норм. форме в терминах пр-ва состояния:

где A(n×n), B(n×m)
то требуется найти матрицу K(1×n)
![]() ,
где
,
где
![]() (n×n)
(n×n)
имеющую собств. набор чисел λ, удовлетворяющий треб-ям опт-ии. Для этого необх. и дост., чтобы: rank[B1|AB|…|An-1B]=n.
Проблема стабилизации: если пара матриц А и В невырождены и при t=>0 доступен для измер. вектор x(t), тогда с целью оптимальной стабилизации м.б. постр. ОС: U= - KX. Такая сист. устойчива. К м.б. выбрана так, чтобы все числа оказ. в лев. полуплоскости и обладали заданными св-ми:
При оптимизации САУ рассматривают 2 варианта (по возможности получения информации о векторе её состояния (полной или неполной).
1-ый вариант проще чем 2-ой, но встречается реже, т.к. применим в основном для простых систем. Если есть математическое описание системы и известно характеристическое уравнение системы (матрица), его корни (собств. числа матрицы системы), то по виду корней можно судить о свойствах системы и, в частности, о её устойчивости.
При оптимизации системы (оптимальная стабилизация), имея возможность влияния на размещение корней в нужной нам области, можно получить такую систему, которая обладала бы желаемыми свойствами.
Методы этой задачи различны, но суть оптимизации системы в изменении свойств системы.