

1.1 Приведение моментов сопротивления и сил, моментов инерции и масс к валу электродвигателя. Учёт потерь в передачах.
Многомассовая система (рис. 1.14 а) приводится к одномассовой системе (рис. 1.14 б), имеющей суммарный J, Мс, угловую скорость ω и угол поворота вала φ.

На основании закона сохранения энергии имеем равенство: Мс ω = ММ ωН, (1.78)
т огда
статического Мс (приведенного
огда
статического Мс (приведенного
 )
момента
)
момента

При поступательном движении исполнительного механизма (рис. 1.15 а):
Мс
ω = Fс
 (1.80)
где
–
линейная скорость механизма; Fc
– сила сопротивления в установившемся
движении; Мс – эквивалентный статический
момент на валу двигателя одномассовой
системы (рис. 1.15 б).
(1.80)
где
–
линейная скорость механизма; Fc
– сила сопротивления в установившемся
движении; Мс – эквивалентный статический
момент на валу двигателя одномассовой
системы (рис. 1.15 б).
Из (1.80) получаем
 , (1.81)
где ρ – радиус приведения поступательного
движения к вращательному.
, (1.81)
где ρ – радиус приведения поступательного
движения к вращательному.
Для линейных передаточных механизмов (j=const, ρ=const) рассмотрим приведения моментов инерции и масс к валу электродвигателя. При вращательном движении исполнительного механизма (см. рис. 1.14 а) и идеальном ПМ кинетическая энергия неприведенной системы должна равняться кинетической энергии приведенной системы (см. рис. 1.14 б), т.е.
 ,
(1.80) Откуда находим суммарный момент
инерции приведенной системы:
,
(1.80) Откуда находим суммарный момент
инерции приведенной системы:
 (1.81)
где
(1.81)
где
 (1.82)
(1.82)
![]() – приведенный к
валу электродвигателя момент инерции
механизма.
– приведенный к
валу электродвигателя момент инерции
механизма.
Для
поступательного движения исполнительного
механизма (см. рис. 1.15а) записываем
равенство кинетических энергий
приведенной и неприведенной систем:
 (1.83),
из которого получаем
(1.83),
из которого получаем
 (1.84),
где
(1.84),
где
 (1.85)
(1.85)
 – приведенный к
валу электродвигателя момент инерции
поступательно движущейся массы m;
– приведенный к
валу электродвигателя момент инерции
поступательно движущейся массы m; – момент инерции ротора электродвигателя;
– момент инерции ротора электродвигателя; – момент инерции барабана, соединенного
с ротором ЭД.
– момент инерции барабана, соединенного
с ротором ЭД.
Приведение сил, моментов сопротивления, моментов инерции и масс к валу ЭД для нелинейных ПМ
Н а
примере кривошипно-шатунного механизма
(рис. 1.16).
а
примере кривошипно-шатунного механизма
(рис. 1.16).
Пренебрегаем потерями в кривошипно-шатунном механизме и массой его элементов.По закону сохранения энергии
FВ =
FA
=
FA , (1.86)
, (1.86)
откуда
FA=
FВ , (1.87)
, (1.87)
Где =ωК·r, (1.88)
 (1.89)
(1.89)
– линейная скорость точки А; ωК – угловая скорость кривошипа АО; r – радиус кривошипа; ω – угловая скорость ротора электродвигателя; j – передаточное число ПМ.
Поскольку при ωК=const скорость ползуна В изменяется как по величине, так и по направлению при изменении угла поворота φ кривошипа ОА, то и сила в точке А будет функцией угла, т.е. FA=F(φ). Момент силы FA относительно точки О
MO(FA)=
FA·r=
FВ·r·
=ММ (1.90)
Статический момент на валу электродвигателя
в соответствии с (1.79):
 (1.91)
(1.91)
Обозначим
mB
как массу ползуна и перемещаемого им
изделия. Тогда кинетическая энергия
движущейся массы mB
будет равна WB=mB (1.92)
(1.92)
Приведем
эту кинетическую энергию в точку А с
фиктивной массой mA,
имеющей линейную скорость
:
mB
=
mA (1.93);
mA=mB
(1.93);
mA=mB
 (1.94)
(1.94)
Момент инерции точечной массы mA относительно оси О по определению равен J0(mA)=JM= mAr2=mBr2 (1.95)
Приведение
этого момента инерции к валу электродвигателя
выполняется в соответствии с правилом
(1.82):
 (1.96)
(1.96)
Для
аналитического определения Мс и
 необходимо найти отношение
необходимо найти отношение
 .
С этой целью воспользуемся следствием
одной из теорем теоретической механики:
при плоском движении проекции скоростей
двух точек на прямую, проходящую через
эти точки, равны, т.е.
.
С этой целью воспользуемся следствием
одной из теорем теоретической механики:
при плоском движении проекции скоростей
двух точек на прямую, проходящую через
эти точки, равны, т.е.
 (АВ)
=
(АВ)
=
 (АВ)
(1.97)
(АВ)
(1.97)
Как
следует из рис. 1.16:
cosβ=
sin(φ+β),(1.98)
тогда
 (1.99)
(1.99)
Или
 (1.200)
(1.200)
Для
треугольника ОАВ (рис. 1.16) по теореме
синусов имеем

Откуда
 (1.201)
(1.201)
Подставим
(1.201) в (1.200), получим
 (1.202)
(1.202)
Теперь можно записать аналитическое выражение для приведенного к валу электродвигателя момента сопротивления
 (1.203)и
момента инерции
(1.203)и
момента инерции
 (1.204)
(1.204)
которые являются функцией угла поворота φ кривошипа ОА.
Момент инерции передаточного механизма в большинстве своем неизвестен, поэтому его принимают равным (10-30)% от момента инерции ротора электродвигателя, т.е.
JПМ=(0,1÷0,3)JД (1.205)
В
общем случае суммарный момент инерции
электропривода, приведенный к валу
электродвигателя, вычисляются по
формуле: J=(1,1÷1,3)JД+ (1.206)
(1.206)
УЧЕТ ПОТЕРЬ В ПЕРЕДАЧЕ.
Потери энергии (мощности) в передаче учитывают двумя способами:
1) приближенным, т.е. с помощью КПД и 2) уточненным, т.е. непосредственным вычислением составляющих потерь. Рассмотрим эти способы.
А. Учет потерь в передачах с помощью КПД.
Механическая
часть электропривода (рис.1.17) включает
ротор электродвигателя ЭД с угловой
скоростью w
и моментом М, передаточный механизм ПМ,
имеющий КПД
 hп
и передаточное число j,
и исполнительный механизм ИМ, на валу
которого приложен момент Мм
и скорость вала wм.
Для наглядности обозначим статический
момент в двигательном режиме
hп
и передаточное число j,
и исполнительный механизм ИМ, на валу
которого приложен момент Мм
и скорость вала wм.
Для наглядности обозначим статический
момент в двигательном режиме
 ,
а в тормозном - .
,
а в тормозном - .![]() Для двигательного режима работы, исходя
из закона сохранения энергии, можно
записать равенство
Для двигательного режима работы, исходя
из закона сохранения энергии, можно
записать равенство
 ,
,
 ,
где
,
где
 ,
,
 - момент механизма, приведенный к валу
электродвигателя.
- момент механизма, приведенный к валу
электродвигателя.
Для тормозного режима будем иметь такое равенство
 ,
,
 ,
,
Но
КПД
 является переменной величиной, зависящей
от постоянных и переменных потерь в
передаче. Определим потерю момента в
передаче для двигательного режима
является переменной величиной, зависящей
от постоянных и переменных потерь в
передаче. Определим потерю момента в
передаче для двигательного режима
 ,
,
Примем допущение, что в тормозном режиме будет такая же потеря момента. Тогда статический момент в тормозном режиме можно записать в таком виде:

1)
 ,
тогда
,
тогда
 ,
что соответствует тормозному режиму,
когда двигатель развивает тормозной
момент. Применительно к грузоподъемному
механизму это будет опускание тяжелого
груза, когда момент от действия груза
на валу двигателя Мг
превышает момент потерь М
в передаче. Получаем так называемый
тормозной спуск;
,
что соответствует тормозному режиму,
когда двигатель развивает тормозной
момент. Применительно к грузоподъемному
механизму это будет опускание тяжелого
груза, когда момент от действия груза
на валу двигателя Мг
превышает момент потерь М
в передаче. Получаем так называемый
тормозной спуск;
2)
 ,
тогда
,
тогда
 ,
что соответствует не тормозному, значит,
двигательному режиму. Для грузоподъемного
механизма это эквивалентно опусканию
крюка, когда момент от его веса на валу
двигателя МК
меньше момента потерь М
в передаче. Имеем так называемый силовой
спуск.
,
что соответствует не тормозному, значит,
двигательному режиму. Для грузоподъемного
механизма это эквивалентно опусканию
крюка, когда момент от его веса на валу
двигателя МК
меньше момента потерь М
в передаче. Имеем так называемый силовой
спуск.
Потери
момента в передаче приближенно выражаются
через две составляющие, одна из которой
для данной передачи является постоянной
величиной, а вторая – пропорциональна
передаваемому моменту:
 ,
,
где
 –
коэффициент постоянных потерь;
–
коэффициент постоянных потерь;
b – коэффициент переменных потерь;
Мс.ном – номинальный статический момент передачи;
Мперед – передаваемый момент, который равен моменту на выходном (по направлению передачи энергии) валу передачи.
Для
установившегося двигательного режима
 .
КПД передачи можно представить отношением
мощностей в установившемся режиме:
.
КПД передачи можно представить отношением
мощностей в установившемся режиме:
 ,
,
где
 ,
,
 ,
,
P2 – мощность на выходном валу ПМ в установившемся двигательном режиме;
P – потери мощности в передаче.
 ,
Обозначим
,
Обозначим
 ,
,
 ,
,
При номинальной нагрузке КЗ=1 и
 ,
,
 ,
,
Таким образом, КПД передачи является функцией коэффициента загрузки и номинального КПД, так как коэффициент постоянных потерь зависит от номинального КПД и для ряда передач приводится в справочниках.
1.2. ВРЕМЯ РАЗГОНА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДА. ОПТИМАЛЬНОЕ ПЕРЕДАТОЧНОЕ ЧИСЛО РЕДУКТОРА.
Пологая в общем случае, что динамический момент является функцией
скорости,
т. е. Мдин(),
время переходного процесса tп.п.
при изменении скорости от 1
до 2
находим из основного уравнения движения
электропривода (1.72)
 (1.72):
(1.72):
 . (1.325)
. (1.325)
Интеграл в (1.325) можно взять только для частных случаев функции Мдин():
а) Мдин() = Мдин = const, в этом случае
 , (1.326)
где
, (1.326)
где
 .
.
б) Мдин = , тогда
 .
(1.327)
.
(1.327)
Поскольку
эл.мех. постоянная времени TM
оперделяется как
 ,
то время переходного процесса лучше
предствить в виде двух формул в зависимости
от знака жёсткости
,
то время переходного процесса лучше
предствить в виде двух формул в зависимости
от знака жёсткости
 динамического момента.
динамического момента.
 ,
при
> 0 (1.328)
,
при
> 0 (1.328)
 ,
при b
< 0 (1.329)
,
при b
< 0 (1.329)
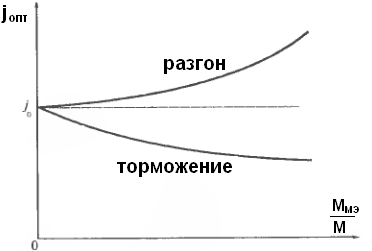
ОПТИМАЛЬНОЕ ПЕРЕДАТОЧНОЕ ЧИСЛО РЕДУКТОРА
По минимуму времени переходного процесса:
первый способ: (ЭД М=const, Jд=const) (Исполн-й мех-м Mн,wн,Jн)


+ торможение , - разгон

При оптимальном j и отсуствия момента нагрузки на валу, кинетическая энергия механизма = кинетической энергии ЭД вместе с редуктором
второй способ (ЭД P =const) (Исполн-й мех-м Mн,wн,Jн)
М=const;
М=Мном ;
;


ОПТИМАЛЬНОЕ ПЕРЕДАТОЧНОЕ ЧИСЛОПО КРИТЕРИЮ минимум габарита ЭД
угловое
ускорение:

при
отсуствии нагрузки на выходном валу
 ,
,
фиктивный
момент инерции
 ,
,
тогда
 следовательно
следовательно

