

4.9. Синтез оптимальной позиционной сау для обработки больших, средних и малых перемещений.
Для того чтобы любое перемещение отрабатывалось оптимально, необходимо, чтобы задание для скорости формировалось исходя из текущего рассогласования по положению при условии торможения с максимальным расчетным замедлением.





В этом случае мы
получаем нелинейный(параболический)
регулятор напряжения. При отработки
малых рассогласований система управления
будет неустойчивой, так как при
 Поэтому
необходимо при малых рассогласованиях
переходить к линейному регулированию
с постоянным коэффициентом усиления.
Поэтому
необходимо при малых рассогласованиях
переходить к линейному регулированию
с постоянным коэффициентом усиления.
Uзс







4,10 Влияние упругости на сау скоростью электропривода. Методы улучшения работы сау.
Имеется
угол скручивания:
 ,
,
G-коэф.упругости.
В СУЭП имеется множество элементов облад. упргостью: вал ,ременные и зубчатые передачи,муфты сцепления, реечные зацепления и т.д.
Обычно при анализе систем с упругими связями выполняют приведения переменных и параметров к валу ЭД.

Момент
при деформации:

Коэффициент вязкости В учитывает действие дисепативных(внутренних)сил. Систему как правило приводят к двухмассовой системе,но все коэффициент приводят к валу ЭД.





Система ЭП в значительной степени выполняет роль демпфера,причем демпфирующие св-ва ЭП,как правило,сказываются сильнее,чем демпфирующие элементы кинематической цепи.
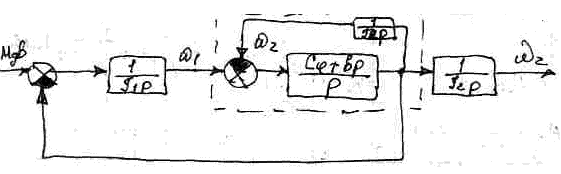
Запишем
операторные уравнения относительно
 ,но
примем
,но
примем
 тогда
структура имеет вид:
тогда
структура имеет вид:
 ,тогда
получаем
,тогда
получаем



