

1.4. Обробка отриманих даних
1. На суміщеному графіку побудувати залежності lI = (l) при різних значеннях Uжив.
2. При Uжив = 220 В визначити максимальну чутливість IIIII при увімкнених К1 та К2 згідно формули
![]() мА/мм,
при l=lмм.
мА/мм,
при l=lмм.
Максимальна чутливість відповідає максимальній крутизні характеристики.
3. При l = - 4 мм та l = + 4 мм визначити похибку ІПП від зміни напруги живлення
![]() %
%
де lI - значення струму при Uжив = 220 В та відповідному значенні l = - 4 мм; l = + 4 мм; l1 = такі ж значення струму при Uжив = 200 В.
1.5. Зміст звіту
Звіт повинен містити мету роботи, схему проведення досліду, протокол іспитів (див. табл. 1.1), побудовані графіки залежностей I = (l) при Uжив = 220 В та Uжив = 200 В.
1.6. Контрольні питання
1. Принцип роботи ІПП.
2. Схема включення ІПП.
3. Недоліки простих ІПП.
4. Причини похибок ІПП.
1.7. Література
1. Иващенко Н.Н. Автоматичне регулювання. - М.: Машгиз, 1962, с. 104-106.
Лабораторна робота № 2
ДОСЛІДЖЕННЯ ДИФЕРЕНЦІЙНОГО ІНДУКТИВНОГО ПЕРВИННОГО ПЕРЕТВОРЮВАЧА ПЕРЕМІЩЕННЯ
Мета роботи - ознайомитись з конструкцією, принципом роботи і диференційною схемою включення індуктивних первинних ІПП.
2.1. Основні теоретичні відомості
Прості індуктивні ІПП мають суттєві недоліки, відмічені в лабораторній роботі № 1. Для усунення початкового струму, підвищення чутливості покращення лінійної характеристики ІПП і зменшення впливу напруги живлення на результат виміру використовують диференційні ІПП. Схема його включення зображена на рис.2.1.
В середньому положенню якоря ІПП індуктивності котушок L1 і L2 рівні тому струм І1 = І2.Струм, виміряний приладом ІПР = І1 - І2 при l=0 ІПР = 0.
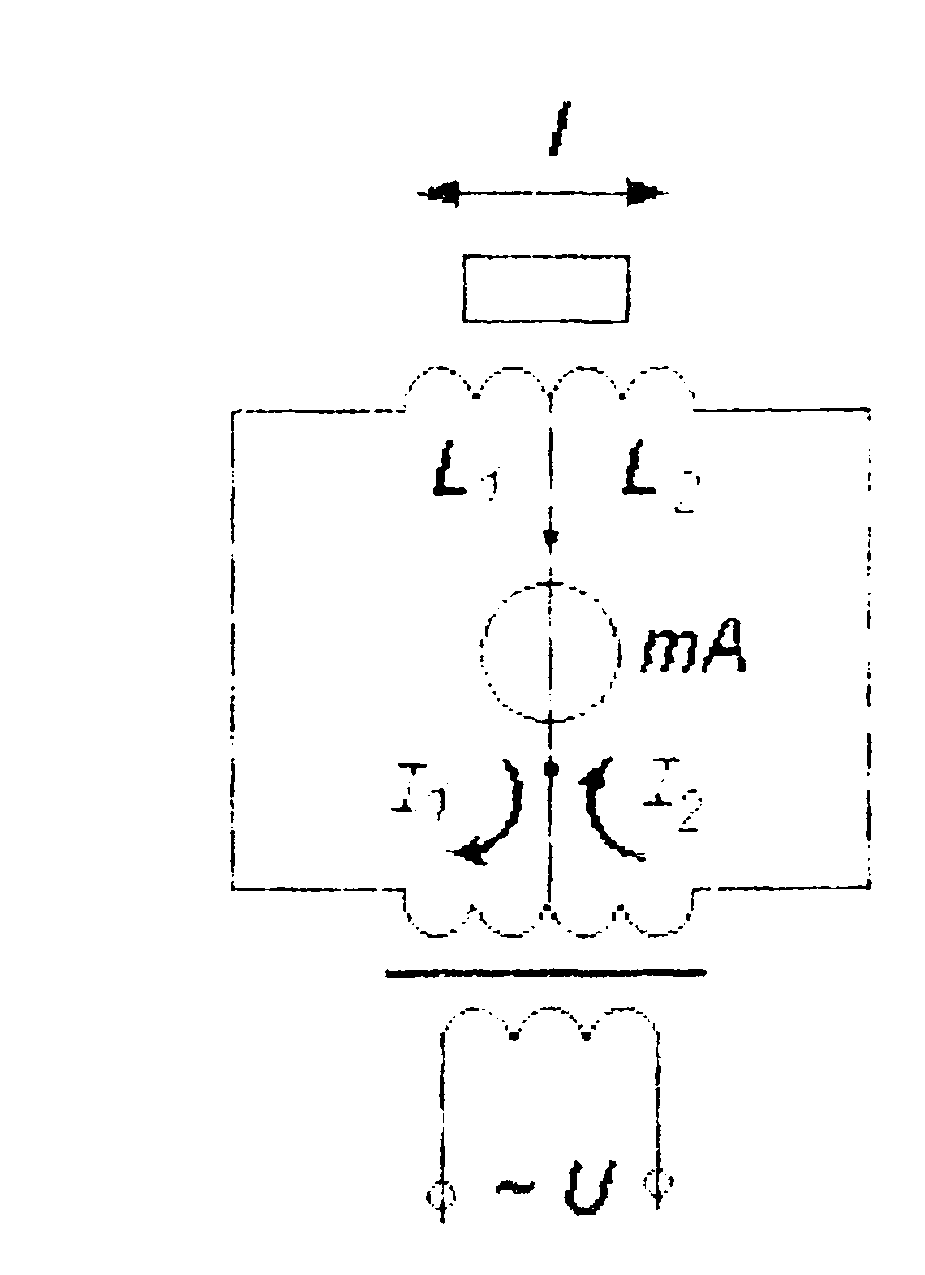
Рис. 2.1
При І 0 І1І2., тому прилад покаже струм ІПР, який визначається переміщенням якора від середнього положення. Оскільки струми І1 і І2 протилежні по фазі, фаза струму, який протікає крізь прилад, визначається фазою більшого струму (І1 або І2).
Для визначення напрямку переміщення якора використовують фазочутливий випрямовувач, полярність напруги якого змінюється на протилежну при зміні вхідного сигналу на 180°.
Чутливість такого ІПП у 2 рази вище, оскільки ІПР утворюється в результаті одночасної зміни струмів І1 та І2, причому один струм збільшується, а другий - зменшується, що призводить до удвоєння різниці зміни струмів.
Зміна значення і частоти напруги живлення однаково впливає на струми І1 та І2, тому їх різниця, яка фіксується вимірювальним приладом, значно менше залежить від зміни значення та частоти напруги живлення.
Промисловість випускає дистанційні показники положення (ДУП), які працюють в комплекті з ІПП та відградуйовані безпосередньо у значеннях переміщення якора. Вмикання ІПП в схему промислового ДПП показано на рис.2.2.
Якщо L1 = L2, тобто при середньому положенні якоря (l = 0), повзуном потенціометра R2 встановлюється рівність потенціалів 1 = 2 в полуперіоди, коли D1 та D2 відкриті. При цьому ІПР = 0. У другий полуперіод напруги живлення ~U діоди закриті і струм крізь прилад не тече.
При зміні положення якоря змінюється потенціал 2, то призводить до появи спрямленого струму крізь прилад, середнє значення якого пропорційно l і напрямок визначається напрямком переміщення.
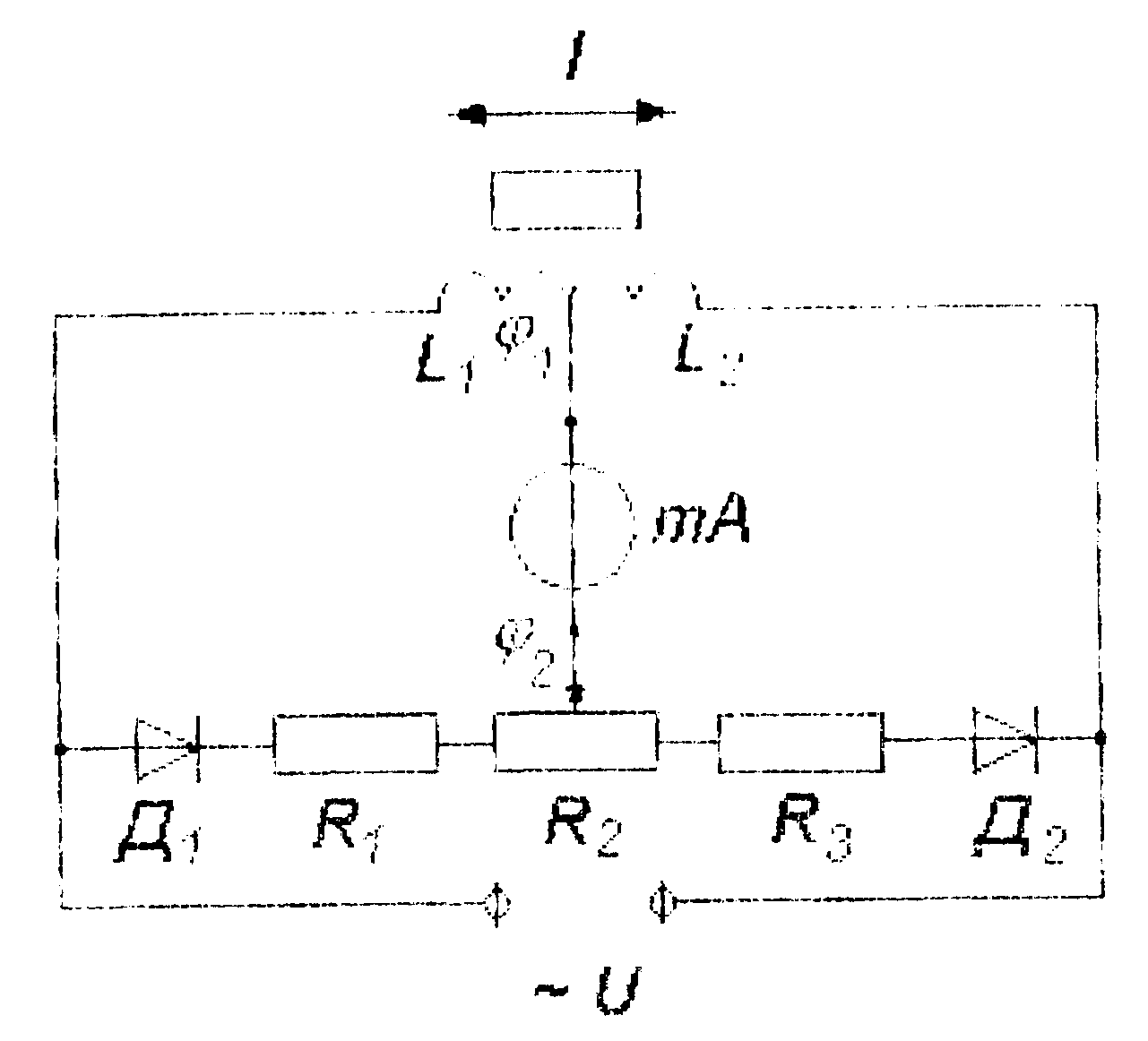
Рис. 2.2.