

Вопрос №1. Основные понятия вычислительной математики.
Численные методы. Решение подавляющего большинства инженерных и научно-технических задач в настоящее время тесно связано с применением вычислительной техники и основывается на описании реальных процессов математическими моделями, которые представляют собой совокупности обычных, интегральных и дифференциальных уравнений.
Всякая математическая модель представляет собой математическое преобразование вида
Y=F(x,u)
где x = (x1,...,xn) - совокупность входных параметров;
y = (y1,...,yn) - совокупность выходных параметров объекта;
U = (U1,...,Un) - совокупность входных управляющих воздействий, с помощью которых осуществляется управление процессами;
F - оператор преобразования.
Для решения математических задач в САПР применяются три группы методов: графические, аналитические, численные.
Графические методы предполагают искать решение с помощью геометрических построений.
Аналитические методы предполагают искать решение задачи в виде формулы.
Численные методы являются основными методами в САПР. В их основе лежит процедура сведения решения задачи к конечному числу арифметических действий над числами, и получить результат в виде численных значений.
Основные требования и показатели численных методов:
1) устойчивость;
2) сходимость;
3) эффективность (скорость сходимости);
4) погрешность.
Алгоритм считается устойчивым, если он обеспечивает нахождение существующего и единственного решения при различных исходных данных.
Сходимость является основным критерием оценки алгоритма. Алгоритм сходится, если итерационная последовательность приближений.
x1,x2,...,xk x* , k , т. е.
![]()
Скорость сходимости. (эффективность) – обозначает количество итераций, затраченных алгоритмом для достижения приемлемой точности решения задачи. Сущ. 3 оценки скорости сходимости: линейная и сверх линейная. Пусть xkx* , k
Говорят, что алгоритм обладает линейной скоростью сходимости, если g э [0;1] и R0
|xk+1-x*|gk |xk-x*| , при kk0
Алгоритм обладает сверх линейной скоростью сходимости, если выполняется условие
|xk+1-x*|gk |xk-x*| , g 0 , k
Алгоритм обладает квадратичной скоростью сходимости, если
|xk+1-x*|c |xk-x*| , c 0
ВОПРОС №2. Решение не линейного уравнения методом простейшей итерации. Понятие сжимающего отображения. Теорема о сходимости метода. Геометрическая интерпретация.
Алгоритмы решения нелинейного уравнения. Метод итераций.
Пусть требуется решить уравнения вида f(x)=0 (*), где f(x) - непрерывная функция.
Чтобы методом итераций найти решение уравнения (*) его необходимо преобразовать к виду
x(1) = (x(0)) (**)
Зададим начальное приближение x0 и подставим его в правую часть уравнения (**).
Получим значение х1
Подставив значение х1 в правую часть уравнения (**) получим х2
Продолжая этот процесс, неограниченно получим последовательность приближений к корню
xk+1=(xk) , k 0 (***)
Условие сходимости метода. Теорема. Пусть в некоторой - окрестности корня х* функция (x) непрерывна и дифференцируема и удовлетворяет неравенству | ' (x)| g, (5) где 0 < g < 1 - константа. Тогда независимо от выбора начального приближения х(0) из указанной - окрестности корня итерационная последовательность не выходит из этой окрестности и справедлива следующая оценка погрешности: Неравенство (5) означает, что метод простой итерации обладает линейной скоростью сходимости.
Геометрическая интерпретация метода. На рис.1 (а) видно, что корень уравнения (1) является абсциссой точки пересечения графиков двух функций y = x и y = (x). В случаях (а) и (б) метод простой итерации сходится при произвольном начальном приближении. В случаях (в) и (г) метод расходится при любом начальном приближении. Замечено, что в случаях (а) и (б) (x) < 1, а в случаях (в) и (г) (x) > 1.
Сжимающее отображение. Понятие с.о. позволяет решать вопрос о сходимости итерационного процесса аналитически, а не геометрическими построениями. Возьмем непрерывную (x), заданную на отрезке a; b . Каждой т. x a; b соответствует y = (x ) на оси ординат.
 Т.е. функция
(x) задает отображение отрезка
a; b
на оси ординат. Чтобы сравнить образ
отрезка с самим отрезком необходимо
отобразить точки на оси 0y через прямую
y = x на ось 0x. Если образ отрезка
a; b
является частью
a; b
, то
(x) отображает
a; b
в себя. Построим последовательность
a; b
;
a ; b
;
a ; b
и т.д. Если после каждого отображения
отрезок уменьшается в М>1 раз, то
отображение называется сжимающим.
Т.е. функция
(x) задает отображение отрезка
a; b
на оси ординат. Чтобы сравнить образ
отрезка с самим отрезком необходимо
отобразить точки на оси 0y через прямую
y = x на ось 0x. Если образ отрезка
a; b
является частью
a; b
, то
(x) отображает
a; b
в себя. Построим последовательность
a; b
;
a ; b
;
a ; b
и т.д. Если после каждого отображения
отрезок уменьшается в М>1 раз, то
отображение называется сжимающим.
Расстояние между двумя т. x1 и x2 = x2 - x1 . Условие сжатия формулируется: отображение (x) является сжимающим на отрезке a; b , если существует 0<x<1 и для любых двух точек x1 , x2 a; b выполняется неравенство:
(x2 ) - (x1 ) x2 - x1 , = 1/М.
ВОПРОС №3. Уравнение МПИ. Условие на выбор числа r. Геометрическая интерпретация.
Модификация итерационного процесса.
Применение метода итераций x =(x); часто затрудняется тем, что (x) несжимающая функция. Помимо этого можно потребовать увеличение скорости сходимости.
Рассмотрим исходное уравнение
f (x) = 0, (1) где f (x) = (x) – x. Решение x итерационного процесса будет и решением (1).
Преобразуем (1) следующим образом f (x) = 0 r f (x) = 0 x = x + r f (x) или x = (x) (2)
где f (x) = x + r f (x), r 0.
Итерационный процесс происходит по формуле
x = (x ) или x = x + r f (x ), = 0,1,2, ... (3)
Решение (2) является решением (1).
В предложенном варианте существование решения и сходимость x , x , x , ... , x , ... обеспечивается условиями теоремы сжатия относительно (x). При этом r может быть выбрана таким методом, что условие сжатия выполняется для (x) в тех случаях, когда (x) несжимаема.
Пусть (x) >1 для итерационного процесса x = (x). Будем искать решение (1) решая (2) с помощью алгоритма (3), а число r выберем из условия сжатия для (x) при x = x*.
(x*) < 1, или 1+ r f (x*) < 1, 1+ r( (x*) – 1) < 1 (4)
-1<1+ r( (x*) – 1) < 1
-2< r( (x*) – 1) < 0
-2/ (x*) – 1< r< 0,
r< 0 и r < 2 / (x*) – 1, если - 1> 0
r> 0 и r < 2 / (x) – 1, если - 1> 0
Из условия сжатия функции (x) получим рекомендации для выбора числа r в уравнении (2) и алгоритма (3), обеспечивающих сходимость (3). Можно потребовать наиболее сильного сжатия, (x*) = 0 (5) Отсюда получаем значение r = -1/ (x*) – 1 (6)
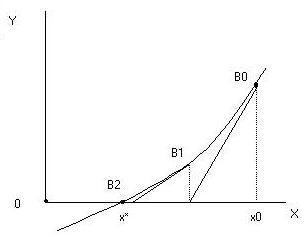
Геометрическая интерпретация.
Касательная в т. Bn y – f(x ) = f (x )(x-xn ).

ВОПРОС №4. Метод Ньютона для решения не линейного уравнения. Условие сходимости метода. Геометрическая интерпретация.
Метод Ньютона. В предложенной методике есть недостаток: r = const на протяжении всего процесса поиска корня. Однако нет препятствий для изменения этого значения в процессе выполнения итерационного процесса. Сделаем r функцией x и подставим в алгоритм:
x = x + r(x ) f (x ), n = 0,1,2, ... .(7)
Потребуем, чтобы (x) была = 0 в достаточно большой окрестности корня x*:
(x) = 1 + r f (x) = 0,
отсюда r(x) = -1/ f (x) = -1/ (x) –1.
Тогда алгоритм будет иметь вид:
x(n+1) = x(к) - f(x(к)) / f (x(к)) – метод Ньютона.
Условие сходимости метода. Для вывода сходимости метода потребуем сжатия функции (x)=x-f(x) / f ‘(x) на произвольном отрезке: x ∊ [a;b]. Если ф-я f(x) – сжимающая, то для люб. x0, x1 из отрезка [a;b] должно происходить уменьшение длины (x1 – x0) при каждом новом отображении ф-и (x). Запишем условие сжатия след. образом:

В ф-ле сжимающегося отобр-я x<1 отсюда если вып. M/m*|x1-x0|<1, то метод сходится. |xk+1-x*| M / m |xk-x*|2
Геометрическая интерпретация.
Касательная в т. Bn y – f(x ) = f (x )(x-xn ).
ВОПРОС №5. Метод секущих. Условие сходимости. Геометрическая интерполяция.
М етод
секущих.
Полагая y =
0, x = xn+1 получим формулу для метода
Ньютона. Если значения производной
вычислять приближенно, как приращение
f(x) в т. x и xn-1, то получим метод секущих.
етод
секущих.
Полагая y =
0, x = xn+1 получим формулу для метода
Ньютона. Если значения производной
вычислять приближенно, как приращение
f(x) в т. x и xn-1, то получим метод секущих.
![]()
При условии x = x и y(x) = 0 получим (1).
Оценка скорости сходимости (***).
Условие сходимости метода. Для вывода сходимости метода потребуем сжатия функции (x)=x-f(x) / f ‘(x) на произвольном отрезке: x ∊ [a;b]. Если ф-я f(x) – сжимающая, то для люб. x0, x1 из отрезка [a;b] должно происходить уменьшение длины (x1 – x0) при каждом новом отображении ф-и (x). Запишем условие сжатия след. образом:

В ф-ле сжимающегося отобр-я x<1 отсюда если вып. M/m*|x1-x0|<1, то метод сходится. |xk+1-x*| M / m |xk-x*|2
ВОПРОС №6. Метод Стеффенсена. Условие сходимости. Геометрическая интерполяция.
Метод Стеффенса. В формулу метода Ньютона сделаем замену f (x ) f(z ⁿ ) - f(x ⁿ )/ z ⁿ - x ⁿ при условии z ⁿ x ⁿ и следует из определения производной f (x ) = lim z x f(z)-f(x)/z-x.
Заменив z ⁿ = x ⁿ + f(x ⁿ ), x (n+1) = x ⁿ - f2(x ⁿ )/ f(x ⁿ + f(x ⁿ ))- f(x ⁿ ), n 0.
Г еометрическая
иллюстрация.
еометрическая
иллюстрация.
Приближение x ⁿ получается как абсцисса т. пересечения с 0 x секущей, проходящей через т. М ⁿ и N ⁿ c координатами (x ⁿ , f(x ⁿ)) и (z ⁿ , f(z ⁿ )).Значение z ⁿ соответствует абсциссе т. пересечения с осью 0x прямой y = f(x ⁿ ) – (x - x ⁿ ), проходящей через т. Мⁿ и параллельной прямой y = - x.
ВОПРОС №7. Методы решения СЛАУ. Прямые и итерационные методы. Условие сходимости итерационных методов.
Численные методы линейной алгебры. К численным методам линейной алгебры относятся численные методы решения систем линейных алгебраических уравнений, обращения матриц, вычисления определителей и нахождения собственных значений и собственных векторов матриц.
Методы решения систем ЛАУ разбиваются на две группы. К первой группе точные или прямые методы – алгоритмы, позволяющие получить решение системы за конечное число арифметических действий. К этой группе относится метод Гаусса.
Вторую группу составляют приближенные методы (итерационные) решения СЛАУ.
Метод Гаусса Предназначен для решения СЛАУ вида:
![]()
или Ах=в
 ,
,
 ,
,

Предположим, что матрица А - невырожденная, т.е. det А не равно 0. В этом случае решение системы существует и оно единственно, а рассматриваемая задача корректна.
Вычисления с помощью метода Гаусса. Состоят из двух шагов, называемых прямым и обратным ходом. Прямой ход метода Гаусса заключается в последовательном исключении неизвестных из системы с верхней треугольной матрицей. Вычисления значений неизвестных производят на этапе обратного хода. Рассмотрим простейший вариант метода Гаусса, называемый схемой единственного деления. Прямой ход состоит из (n-1) шагов исключения.
1-й шаг. Целью этого шага является исключение неизвестного x1 из уравнений с номерами i = 2,3,...,n. Предположим, что коэффициент a11 0 (главный элемент первого шага)
Вычислим величины i1=ai1 /a11(i=2,3,...,n), называемые множителями 1-го шага. Вычтем из второго, третьего и ... до n-го уравнений системы (1) первое уравнение, умноженное соответственно на 21,31,..., n1.Это позволит обратить в нуль коэффициенты при х1 во всех уравнениях , кроме первого. В результате получим эквивалентную систему.

в которой aij(1)=aij-i1 aij , bi(1)=bi-i1 b1.
2-й шаг. На этом шаге производится исключение х2 из уравнений с номерами i = 3, 4, . . . , n.
Вычислим i2=ai2(1)/ a22(1) относительно главного элемента 2-го шага, после чего произведем те же действия по исключению элементов аi2 из 3-й n . . . строк.
Аналогично проводятся остальные шаги.
k-й шаг. Предположим, что главный элемент k-го шага akk(k-1)0, вычислим множители k-го шага ik= aik(k-1)/akk(k-1) , (i=k+1,...,n) и вычтем последовательно из (k + 1)-го , . . . , n-го уравнений полученной на предыдущем шаге системы k-е уравнение, умноженные соответственно на k+1,k+2,..., nk.
После (n -1) - го шага исключения получим систему уравнений
 (2)
(2)
Получается матрица А(n-1), которая является верхней треугольной. На этом вычисления прямого хода заканчиваются.
Обратный ход. Из последнего уравнения системы (2) вычислим хn. Подставляя полученное значение в предпоследнее уравнение, вычислим значение хn-1. Таким образом, можно вычислить значения всех неизвестных. Вычисления здесь проводятся по формулам:
![]()
![]()
Метод простой итерации.
Для того чтобы применить метод простой итерации к решению системы ЛАУ
Aх = b (3)
С квадратной невырожденной матрицей А, необходимо преобразовать эту систему к виду
х = Вх + с, (4)
где В - квадратная матрица с элементом bij (i,j=1.n), с - вектор столбец с элементами ci (i=1,n).
Зададим некоторое начальное приближение x(0)=(x1(0),x2(0),..., xn(0))T. Подставив его в правую часть системы (4), находим первое приближение x(1)= Bx(0)+c и так далее.
Сходимость метода простой итерации.
||B||<1. В этом случае существует и единственное решение системы (3) x. При этом метод итерации сходится при произвольном начальном приближении x(0).
||B|| - норма матрицы.
Евклидова норма матрицы, имеет вид:

Критерий окончания итерационного процесса.
||x(n)-x(n-1)|| <
Метод Зейделя.
Пусть система (3) приведена к виду:

С коэффициентами, вычисленными по формулам:
вij = - aij / aii , cij = вi / aii (i,j = 1,n , j i)
Метод Зейделя представляет собой модификацию метода простых итераций. Идея метода состоит в том, что при вычислении на (k+1)-ом шаге приближения к неизвестному хi при i>1, используется уже найденное (k+1)-е приближение x 1 , x 2, . . . , x i-1
Таким образом матрица В разбивается на две треугольные матрицы: верхнюю и нижнюю.

Расчетная формула принимает вид:
x k+1 =B1 x k+1 + x k + C
или
![]()
Условия сходимости и критерий окончания итерационного процесса те же.
ВОПРОС №8. Метод простой итерации для решения СНУ. Теорема о сходимости методов.
Методы решения систем нелинейных уравнений.
f1 (x1, x2, . . . , xn) =0,
f2 (x1, x2, . . . , xn) =0,
..........
fn (x1, x2, . . . , xn) =0,
Найти точное решение системы (1), то есть вектор x = (x1, x2, . . . , xn)T удовлетворяющий уравнениям (1), практически невозможно, так как в описанном случае исключается использование прямых методов. Реальным путем решения системы (1) является использование итерационных методов для получения приближенного решения x* = (x1*, x2* , . . . , xn*) удовлетворяющего при заданном > 0 неравенству ||x* - x|| < .
Для удобства будем использовать сокращенную векторную форму записи систем: вектор неизвестных x = (x1, x2, . . . , xn)T и векторную функцию f = (f1, f2, . . . , fn)T.
В этих обозначениях система (1) примет вид:
f (x) = 0. (2)