

Sp11
.docРахмуков Владимир ВСС-1-97 МИРЭА 1999г.
ГОСУДАРСТВЕННЫЙ КОМИТЕТ РОССИЙСКОЙ
ФЕДЕРАЦИИ
ПО ВЫСШЕМУ ОБРАЗОВАНИЮ
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ИНСТИТУТ РАДИОТЕХНИКИ, ЭЛЕКТРОНИКИ И АВТОМАТИКИ
(ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
КАФЕДРА МАТЕМАТИЧЕСКОГО ОБЕСПЕЧЕНИЯ ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМ
КУРСОВАЯ РАБОТА ПО ДИСЦИПЛИНЕ “Системное программное обеспечение”
Студент:
Рахмуков В.В.
Руководитель:
Гулиева.Д.М.
Москва, 1999 г.
В современной электронной промышленности широко используются робототехнические устройства которые позволяют выполнять некоторые операции технологического процесса при минимальном контроле со стороны рабочего. При хорошей точности и стабильной работе робототехнического устройства это позволяет получить более стабильные показатели качества, чем при ручном выполнении операции. Также возможно повышение производительности труда так как один рабочий может обслуживать несколько таких устройств.
Для обеспечения ритмичной и стабильной работы по выпуску электронных устройств необходимо иметь робототехнические устройства с высокими показателями надёжности.
Одним из видов робототехнических устройств являются координатные столы которые обеспечивают перемещение рабочей части по заданным пользователем координатам. Примером использования таких устройств может служить операции «Заливка чипа гелем», «Приклейка рамки» , «Приклейка крышки» выполняемые при изготовлении коммутаторов электронного зажигания. При операции «Заливка чипа гелем» - в качестве рабочей части используется дозирующая головка которая и обеспечивает процесс заливки, а координатный стол перемещается от коммутатора к коммутатору. В операциях «Приклейка рамки» , «Приклейка крышки» в качестве рабочей части используется шприц который обеспечивает подачу клея , а координатный стол перемещает этот шприц по заданному контуру.
Достоинствами этих устройств является :
-
переход от ручного нанесения клея или геля к автоматизированной операции
-
повышение качества
-
повышение производительности
-
отсутствие необходимости в квалифицированных рабочих
Однако есть некоторые недостатки, такие как:
-
необходимость переоборудования производства
-
случайные погрешности перемещения рабочей части приводящие к неправильному нанесению клея или геля
Темой курсового проекта является повышение точности и надёжности системы перемещения рабочей части робота путём установки обратной связи на оси перемещения.
Ф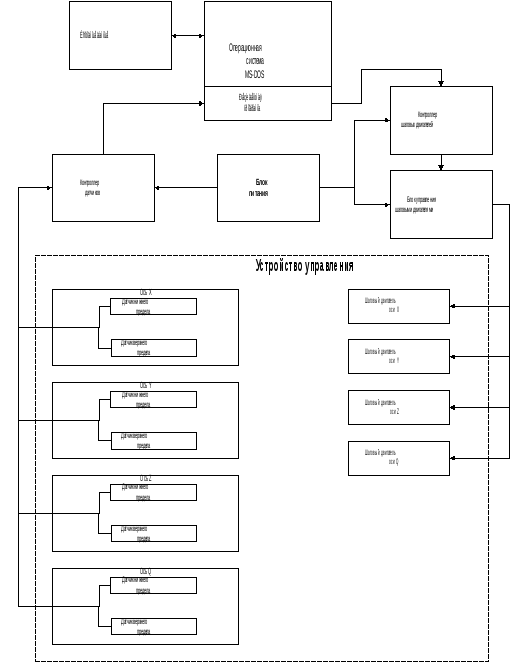 ункциональная
схема системы до модернизации
ункциональная
схема системы до модернизации
Назначение основных устройств.
-
Резидентная программа - получает исходные данные от пользователя, обеспечивает расчет координат перемещения, количества шагов по всем осям и передачу этих данных на контроллер шаговых двигателей. Также обеспечивается прием и обработка информации с контроллера датчиков.
-
Контроллер шаговых двигателей - преобразует цифровые данные полученные от резидентной программы в управляющие сигналы поступающие на блок управления шаговыми двигателями.
-
Блок управления шаговыми двигателями - получает сигнал с контроллера шаговых двигателей и управляет питанием шаговых двигателей.
-
Контроллер датчиков - обеспечивает передачу сигнала от сработавшего датчика в резидентную программу.
-
Блок питания - обеспечивает энергоснабжение всей системы.
-
Датчики нижнего и верхнего пределов - вырабатывают сигнал при выходе рабочей части за установленные координаты.
-
Шаговые двигатели - обеспечивают перемещение рабочей части.
О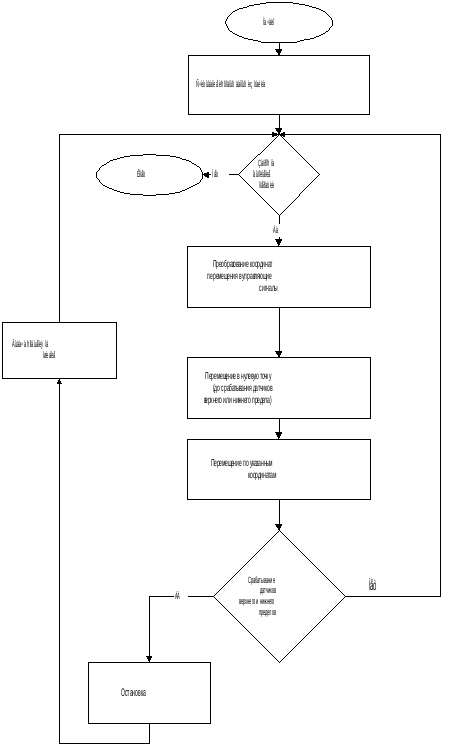 писание
работы системы.
писание
работы системы.
Резидентная программа «Gel.exe» под управлением
MS-DOS считывает заданные координаты перемещения рабочей части из файла «up.jkl». Через порты ввода-вывода на контроллер шаговых двигателей выдаётся сигнал который преобразуется в управляющие сигналы блока управления шаговыми двигателями, в результате чего на шаговые двигатели подается напряжение и рабочая часть перемещается по указанным координатам. Прежде чем двигаться по указанным координатам система должна найти начало координат, для чего шаговые двигатели перемещают рабочую часть в нулевую точку до срабатывания датчиков верхнего или нижнего пределов. Срабатывание датчиков говорит о том что рабочая часть достигла нулевой точки. Эта точка принимается за начало координат и начинается движение рабочей части в заданную точку, после достижения которой выполняется рабочая функция (функция определяется модификацией рабочей части). Далее рабочий может либо разрешить повторение цикла, либо остановить систему.
Описанная система имеет несколько недостатков такие как
-
недостаточная точность перемещения рабочей части (при сбое или внешнем препятствии при движении рабочей части система не может определить наличие ошибки, что может привести к браку).
-
необходимость каждый раз возвращаться в нулевую точку для определения начала координат, что приводит к потерям времени, а следовательно и производительности труда.
Устранить эти недостатки можно установив обратную связь на оси перемещения. Обратная связь представляет собой датчики движения установленные на оси перемещения рабочей части, т.к. подвижная часть датчика движения жёстко закреплена на оси, то датчик будет выдавать импульсы пропорциональные перемещению. Сосчитав эти импульсы можно точно определить положение рабочей части относительно нулевой точки. Зная положение рабочей части в любой момент времени, нет необходимости возвращаться в нулевую точку для определения начала координат.
Таким образом , модернизация системы путём установки обратной связи на оси перемещения устраняет перечисленные недостатки , что даёт выигрыш в производительности труда и качестве.
Функциональная схема системы после модернизации
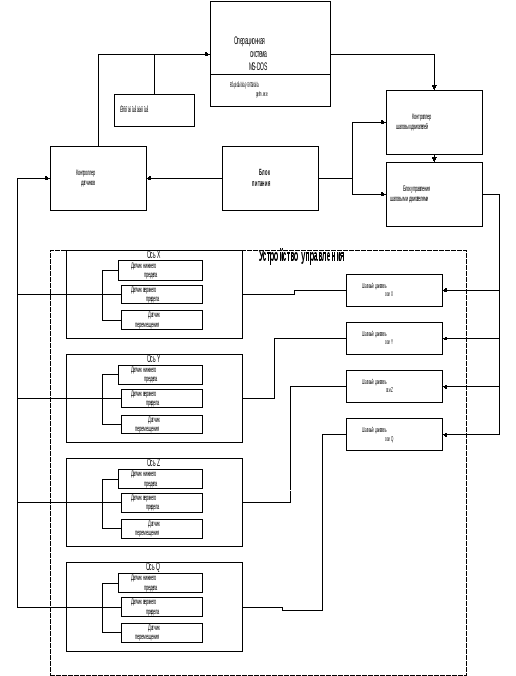
Назначение основных устройств.
-
Резидентная программа - получает исходные данные от пользователя, обеспечивает расчет координат перемещения, количества шагов по всем осям и передачу этих данных на контроллер шаговых двигателей. В резидентной программе производится сравнение данных полученных с датчика движения с заданными перемещениями и выработка управляющего воздействия. Также обеспечивается обработка информации с датчиков нижнего и верхнего пределов.
-
Контроллер шаговых двигателей - преобразует цифровые данные полученные от резидентной программы в управляющие сигналы поступающие на блок управления шаговыми двигателями.
-
Блок управления шаговыми двигателями - получает сигнал с контроллера шаговых двигателей и управляет питанием шаговых двигателей.
-
Контроллер датчиков - обеспечивает преобразование импульсов полученных с датчика движения в цифровой сигнал, приём сигналов с датчиков верхнего и нижнего пределов и передачу этой информации в резидентную программу.
-
Блок питания - обеспечивает энергоснабжение всей системы.
-
Датчики нижнего и верхнего пределов - вырабатывают сигнал при выходе рабочей части за установленные координаты.
-
Датчики движения - вырабатывают импульсы при перемещении рабочей части.
-
Шаговые двигатели - обеспечивают перемещение рабочей части.
О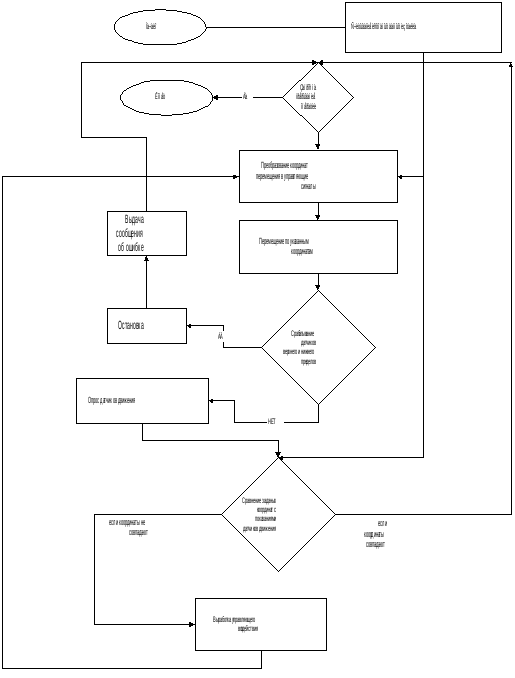 писание
работы модернизированной системы.
писание
работы модернизированной системы.
Резидентная программа «Gel.exe» под управлением
MS-DOS считывает заданные координаты перемещения рабочей части из файла «up.jkl». Через порты ввода-вывода на контроллер шаговых двигателей выдаётся сигнал который преобразуется в управляющие сигналы блока управления шаговыми двигателями в результате чего на шаговые двигатели подается напряжение и рабочая часть перемещается по своим осям. Прежде чем двигаться по указанным координатам система должна найти начало координат, для чего шаговые двигатели перемещают рабочую часть в нулевую точку до срабатывания датчиков верхнего или нижнего пределов. Срабатывание датчиков говорит о том что рабочая часть достигла нулевой точки. Эта точка принимается за начало координат и начинается движение рабочей части в заданную точку, датчики движения отслеживают перемещение и выдают импульсы на контроллер датчиков который преобразует полученные импульсы в координаты перемещения. В резидентной программе координаты перемещения сравниваются с заданными координатами и если они не совпадают на шаговые двигатели подаются необходимые для исправления расхождения сигналы. В результате перечисленных действий рабочая часть будет расположена по заданным координатам с высокой точностью после чего выполняется рабочая функция (функция определяется модификацией рабочей части). Далее, если рабочий не остановил систему,
цикл повторяется, но рабочая часть уже не возвращается в нулевую точку для определения начала координат, а отрабатывает только заданные программой координаты.
Для реализации данного усовершенствования необходимо :
-
установить датчики движения на оси перемещения
-
доработать контроллер датчиков для приёма аналоговых сигналов с датчиков движения и преобразования их в цифровой сигнал
-
дополнить программное обеспечение функцией сравнивающей исходные координаты с реальным положением рабочей части и вырабатывающей управляющее воздействие
Функция «CompareRun» получает в качестве исходных данных заданные координаты перемещения, опрашивает контроллер датчиков , сравнивает эти данные и подаёт на контроллер двигателей сигнал необходимый для исправления расхождения.