

§ 8. Поворотные и велосипедные краны
 Поворотные
краны могут
быть с вращающейся или с неподвижной
колонной. Поворотные краны с вращающейся
колонной получили преимущественное
применение в металлургических цехах.
В мартеновских цехах поворотные
краны используют для ремонта ковшей и
обслуживания желобов, в конвертерных
цехах— для подачи скрапа в конвертер,
а в доменных —
Поворотные
краны могут
быть с вращающейся или с неподвижной
колонной. Поворотные краны с вращающейся
колонной получили преимущественное
применение в металлургических цехах.
В мартеновских цехах поворотные
краны используют для ремонта ковшей и
обслуживания желобов, в конвертерных
цехах— для подачи скрапа в конвертер,
а в доменных —
 для
обслуживания механизмов
воздухонагревателей и горнов.
для
обслуживания механизмов
воздухонагревателей и горнов.
В металлургических цехах поворотные краны обслуживают небольшие участки, а поэтому их делают с постоянным вылетом.
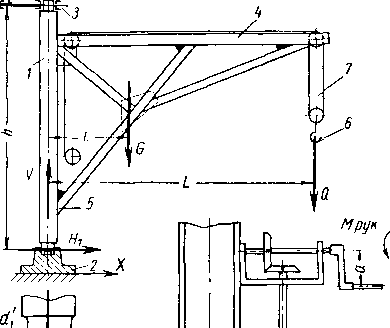
Поворотный кран (рис. 59) имеет вращающуюся колонну /,опирающуюся нижним концом на подпятник и подшипник 2, а верхним— на подшипник 3.
Рис.
59. Поворотный кран![]()
В некоторых конструкциях поворотных кранов для изменения вылета установлена тележка, перемещающаяся по верхнему поясу металлоконструкции фермы.
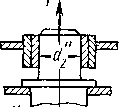
При расчете механизма поворота крана определяют усилия, действующие на подпятник. Вертикальное усилие находят, спроектировав все действующие силы на вертикальную ось:
2 (Р)у = 0; Q + G-V = 0; V = Q + G,
где Q — грузоподъемность крана в н (кГ);
G — вес крана в н (кГ);
V — вертикальное усилие в н (кГ).
Для определения горизонтальных усилий, действующих на подшипники, составляют уравнение моментов, приняв за центр моментов точку пересечения сил реакций в подпятнике:
2 МА = 0; QL + Gl- Hxh = 0; Н1 = BL+^L;
(Р)х = 0; Н1 - Я2 = 0; Я2 = Нх = Н,
где L — вылет крана в ж;
— расстояние от оси до центра тяжести крана в м; h — расстояние между осями опор в м.
Момент силы трения от вертикальной нагрузки при кольцевой пяте определяют по формуле
Мх = |i (Q + G) н-м (кГ-м).
Момент сил трения от горизонтальных нагрузок, действующих на подшипник (верхний и нижний при одинаковых диаметрах), определяют по формуле
М2 = 2\iHr н-м (кГ-м).
При разных размерах подшипников
М2 = [I (Н\г[ + Н>г ) н-м.(кГ-м),
где г1 — внешний радиус пяты в ж;
г0 — внутренний радиус пяты в м\ jLt х = jx = 0,1 — коэффициент трения скольжения; г', г", г — радиусы подшипников в м;
ri
^ г-
— средний радиус пяты в м.
Суммарный статический момент сил трения
Мст = (Q + G) Fl + 2V-Hr Н'м-
При ручном приводе дальнейший расчет сводится к определению момента Мрук рукоятки и передаточного числа i:
Мрук = Ра н-м (кГ-м),
где Р — усилие рабочего на рукоятке в н (кГ); а — плечо рукоятки, равное 0,3—0,4 м\
j М ст
1°бш‘ Мрук г,жх ’
где io6u( = iKiu — передаточные числа конической и цилиндрической передач; цмех — к. п. д. механизма.
Мощность электродвигателя привода механизма вращения крана
д 7 Мпк
N = -тг=-^— квт,
9751] мех
где М = Мст + Мд11Н — динамический момент от ускорения массы фермы и груза относительно оси вращения в н-м (кГ-м); пк — число оборотов крана в об/мин;
/VIдин = Jq>е + Jгр8 Н'М (К-Г-М),
где J(p — момент инерции фермы, равный сумме моментов инерции масс стержней фермы относительно оси вращения, в кг-м-сек2;
JеР — момент инерции груза относительно оси вращения крана в кг-м-сек
g
где е = угловое ускорение в 1 /сек2
t — время разгона электродвигателя в сек;
L — вылет груза в м.
Передаточное число механизма вращения колонны
^ _ пдв Пк
где пдв — число оборотов электродвигателя в минуту.
В консольных и велосипедных кранах ведущие ходовые колеса двигаются по одному рельсу: устойчивость крана обеспечивают горизонтальные опорные ролики. Консольные краны имеют жесткие фермы, по которым перемещаются тележки с крюками; велосипедные краны снабжены поворотными стрелами.
Консольные краны применяют в сталеплавильных цехах (в них они заменили мостовые уборочные краны), литейных и бандажеколесопрокатных цехах. Велосипедные краны применяют в литейных пролетах сталеплавильных цехов.
Консольный уборочный кран устанавливают в литейном пролете. Он перемещается вдоль фронта мартеновских печей и пред- 90
,2.
назначен для смены желобов, подачи огнеупорных материалов, ремонта желобов, ремонта ковшей, смены стопоров.
Консольный кран (рис. 60) имеет ферму 1 и крановую тележку 2 грузоподъемностью 5 т. Тележка перемещается внутри решетча
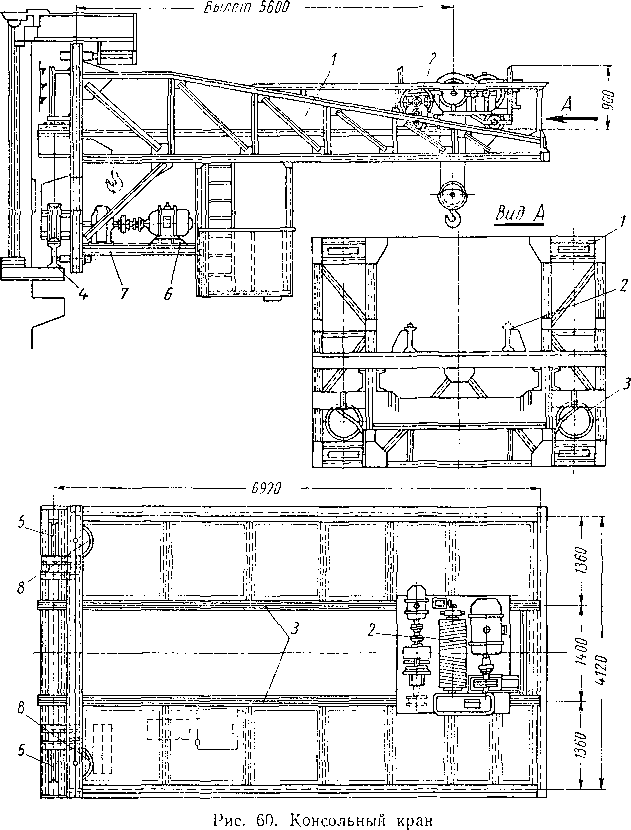
той пространственной фермы моста по рельсам, укрепленным на двухтавровых балках 3.
Кран передвигается по специальному подкрановому пути 4 на двух колесах 5. Приводное колесо получает вращающий момент
от электродвигателя 6 через редуктор 7. Две пары верхних и нижних горизонтальных роликов 8 удерживают кран от опрокидывания.
К преимуществам консольных уборочных кранов перед мостовыми относится то, что они не мешают работе разливочных кранов, а их стоимость значительно меньше стоимости мостовых кранов той же грузоподъемности. Консольные краны используются значительно эффективнее мостовых уборочных кранов, работа которых
ограничена тем, что они установлены на одних путях с разливочными кранами.
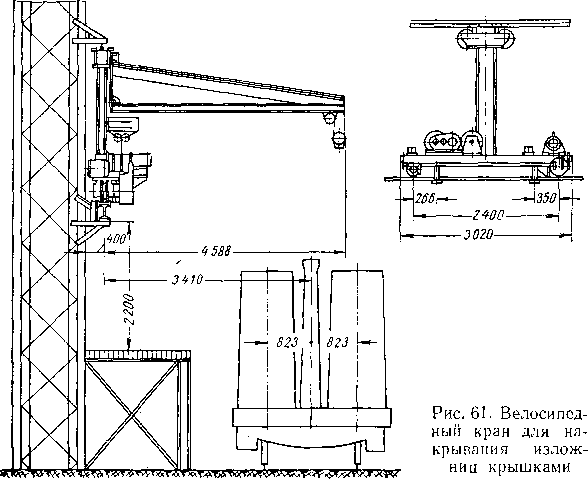
Для улучшения качества кипящего металла в мартеновских цехах применяют накрывание изложниц крышками. Процесс накрывания механизирован установкой велосипедных кранов (рис. 61) грузоподъемностью 0,5—3 т, расположенных над площадкой разливщика. Велосипедный кран имеет стрелу с вылетом 4,6 м, механизм подъема и механизм передвижения. Стрела такого крана поворачивается на 180° вручную, в нерабочем положении ее отводят в направлении подкрановой балки.
Механизм подъема имеет электродвигатель 1 (рис. 62, а), соединительную эластичную муфту 2, червячный редуктор 3, цилиндрическую зубчатую передачу 4, барабан 5 и двухколодочный тормоз 6.
Для ограничения высоты подъема крюка имеются конечный выключатель и ограничитель грузоподъемности.
0~и~Е
V
У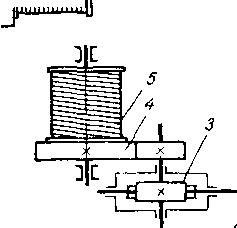
6}
Рис.
62. Кинематическая схема велосипедного
крана: а
— механизм подъема; б
—
механизм передвижения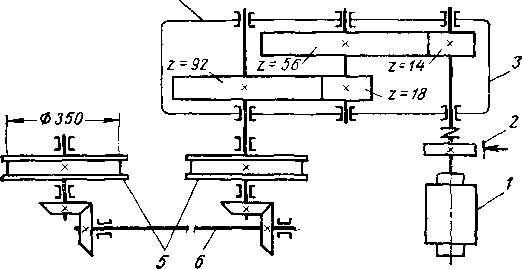
Механизм передвижения (рис. 62, б) крана имеет электродвигатель 1, электротормоз 2, двухступенчатый редуктор 3, два приводных ходовых колеса 5, соединенных двумя парами конических шестерен с валом 6. Для устойчивости кран имеет нижнюю опору в виде двух горизонтальных роликов и верхнюю опору, состоящую из двух пар горизонтальных роликов и одной пары вертикальных роликов, опирающихся на рельс. Пуск и остановка крана осуществляются от щитка кнопочного управления, расположенного на стреле.
Скорость подъема груза 12,4 м/мин, передвижения крана 49,4 м/мин. Высота подъема груза 8 м.