

§ 7. Простые грузоподъемные машины
Гидравлические домкраты. Преимущество гидравлических домкратов заключается в возможности подъема с их помощью больших грузов (до 1000 т) при относительно небольших размерах домкрата.
Гидравлический домкрат (рис. 50) имеет рабочий цилиндр, плунжер с уплотняющим манжетом и камеру, в которой находится

Давление рабочей жидкости в цилиндре домкрата
О
q = н !см“ (кГ'СМ2).
~4~
Усилие, прилагаемое к поршню насоса,
jr Qd/* .
K = —q = -рг- к (кГ).
К приводному рычагу необходимо приложить усилие
р»w>.
где D — диаметр поршня (плунжера) домкрата в см\ d — диаметр поршня насоса в см\
Ll, L — длина малого и большого плеча приводного рычага в см (ж);
Q — грузоподъемность домкрата в н (кГ); т] — к. п. д. домкрата, равный 0,7—0,8.
Передаточное число домкрата
Ручные тали представляют собой переносные подъемные механизмы с ручным приводом; применяют их при ремонтно-монтажных работах для подъема грузов до 5 т. Если таль применяют на определенных участках, то ее подвешивают к тележкам (кошкам), перемещающимся по специальным балкам.
Таль шестеренная (ГОСТ 2799—63) имеет тяговую цепь 1 (рис. 51, а), тяговое колесо 2, укрепленное на валу 3, плане-
а
— кинематическая схема шестеренной
тали; б
— кинематическая схема червячной тали;
в
—
схема тележки для подвешивания тали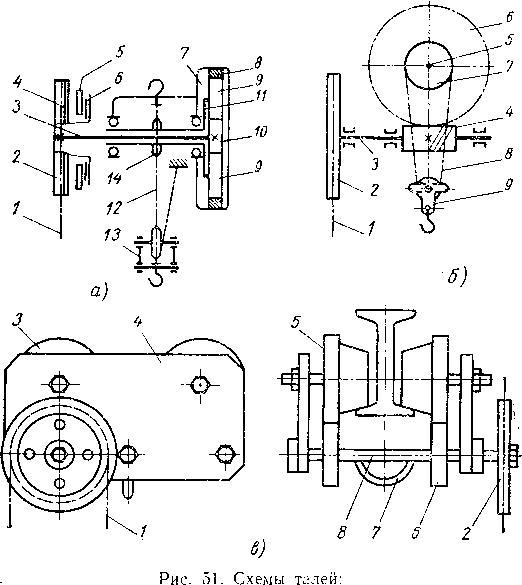
тарный редуктор 7 и грузовую цепь 12, соединяющую крюковую обойму 13 с грузовой звездочкой 14.
Планетарный редуктор имеет неподвижный зубчатый венец 8, промежуточную шестерню 9, шестерни 10 и палец 11. Тормоз состоит из диска 4, храпового колеса 5 с собачкой и шайбы 6.
Червячная таль (ГОСТ 1107—62) имеет тяговую сварную калиброванную цепь 1 (рис. 51, б), тяговое колесо 2, на валу 3 которого закреплен червяк 4 червячной пары. На валу 5 с червячным колесом 6 закреплена звездочка 7 грузовой пластинчатой или сварной калиброванной цепи 8, к которой подвешена крюковая обойма 9.
Для повышения к. п. д. червячной передачи принят угол наклона 20°; передача является несамотормозящей, вследствие чего в конструкции предусматривают дисковые или конические грузоупорные тормоза, действующие от осевого усилия вала червяка.
АО-ту-02
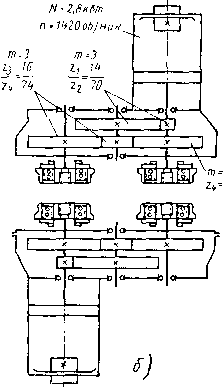
Рис.
52. Электроталь грузоподъемностью 5 т:
а
механизм подъема; б
— механизм передвижения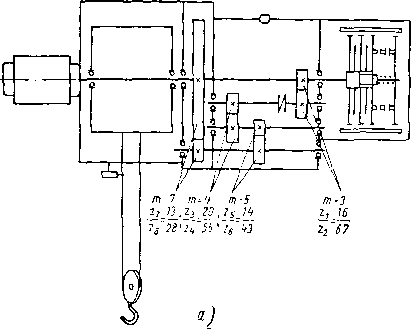
Электротали представляют собой подвесные тележки с механизмом подъема и передвижения, перемещающиеся по монорельсу. Грузоподъемность электроталей 0,5—10 т. Они компактны, имеют сравнительно небольшую стоимость и малые эксплуатационные затраты.
Электроталь, изображенная на рис. 52 (ГОСТ 3472—63), имеет электродвигатель, барабан, четырехступенчатый редуктор, дисковый электромагнитный тормоз, грузовой крюк с подвеской и ограничитель подъема. Соединение отдельных узлов электротали шлицевое, что намного облегчает ее ремонт и сборку.
Электромагнитный дисковый тормоз смонтирован на валу редуктора со стороны, противоположной электродвигателю. Он состоит из нескольких вращающихся и неподвижных дисков с фрикционными накладками, торцовых электромагнитов и пружины.
Замыкание тормоза производится пружиной, прижимающей подвижные диски к неподвижным. Размыкает тормоз электромагнит, при включении которого пружина растягивается, и трение между дисками не происходит,
Электротали грузоподъемностью 1—3 т подвешивают к четырехосной ходовой тележке с электроприводом, грузоподъемностью 5ши больше — к двум ходовым тележкам, одну из которых (приводную) снабжают двумя электродвигателями и редукторами по одному с каждой стороны.
Ток подводится по троллям или по гибкому кабелю; управляют электроталью с помощью подвесного дистанционно-магнитного
Рис.
53. Электроталь (тельфер) для транспортирования
мульд в мартеновском
цехе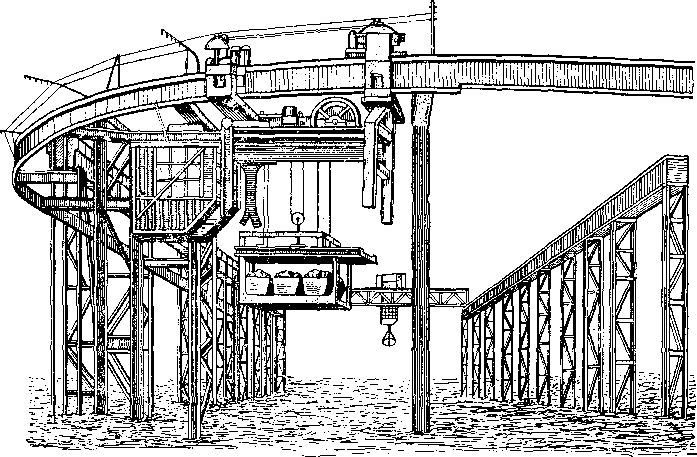
пускателя или с помощью контроллера, размещенного в кабине управления.
На металлургических заводах электротали применяют при ремонтных работах, а также для транспортирования шихтовых материалов, подачи топлива, уборки окалины и отходов прокатного производства.
Ремонтные электротали грузоподъемностью 10 т устанавливают в литейных пролетах, в заливочных пролетах сталеплавильных цехов и при ремонтах литейных кранов.
Некоторые электротали снабжают специальными захватами. На рис. 53 показана электроталь, транспортирующая мульды с шихтового двора в главное здание мартеновского цеха. Электротали с грейферами применяют для уборки окалины на установке непрерывной разливки стали.
Лебедки
металлургических цехов применяют для
перекидки клапанов, подъема и опускания
шиберов, заслонок садочных окон
мартеновских печей, маневрирования
фурмами для подачи кислорода в
сталеплавильные агрегаты и для многих
других операций, а также погрузочно-разгрузочных
и монтажных работ.
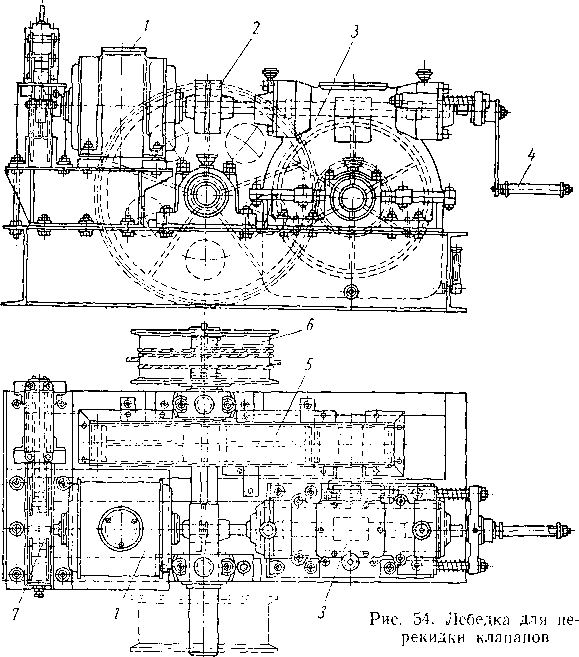
Лебедка имеет барабан, на который навивается канат, редуктор (цилиндрический, реже червячный), тормоз и электродвигатель. Многие из конструкций лебедок имеют запасной ручной привод, необходимый для обеспечения работы при временном снятии напряжения. В качестве примера рассмотрим типовую лебедку для перекидки клапанов (рис. 54) при регенераторах мартеновский печи.
Согласно схеме (рис. 55) лебедка приводится в действие электродвигателем 1 типа МТК-22-6 (N = 7,5 квт, п = 905 об/мин и ПВ = 25%), соединенным муфтой 2 с однозаходным червяком редуктора 3, который через зубчатую передачу 5 передает враше- 82
ние барабану 6. На свободном конце вала электродвигателя установлен двухколодочный электромагнитный тормоз 7. Червячный вал редуктора установлен на подшипниках качения, а ведомый вал — на подшипниках скольжения. В случае снятия напряжения лебедка приводится в действие вручную при помощи рукоятки 4 с пружинным отводом.
обслуживает
лебедку. Вал барабана опирается на
подшипники с вкладышами из антифрикционного
чугуна. Барабан связан с тяговым
устройством клапанов или шибера канатом,
перекинутым через систему блоков.
Электродвигатель
в крайних положениях выключается
конечным выключателем.
Техническая
характеристика лебедки ИЗТМ
Тяговое
усилие в ш
(кГ)
24 (2400)
Диаметр
каната в мм
15,5
Диаметр
барабана в мм
500
Скорость
наматывания каната в м/сек
. . . 0,27
Общее
передаточное число привода .... 88,5
Габариты
ь м
(мм) . .
. 2,1X1,23X1,01
(2100X1230X1010)
Масса
(вес) в кг 1726
I
Рис. 55. Кинематиче- _1 ская схема лебедки
для ж перекидки клапанов
]
[
У
6
5
/
/
]
1 La
'Zz2
=го/во
т~)3
Шпили
(кабестаны) представляют собой лебедки
с вертикальными гладкими барабанами.
Их используют на маневровых работах,
например для перемещения железнодорожных
вагонов при погрузке твердого чугуна
на разливочной машине. Шпиль имеет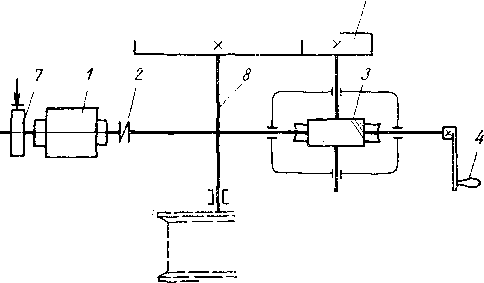
электродвигатель 1 (рис. 56) с электроаппаратурой, червячный или цилиндрический редуктор 2, размещенный внутри водонепроницаемого кожуха 3, вертикальный вал 4 и конусоидальный барабан 5. В некоторых конструкциях шпилей предусмотрен тормоз.
При работе шпиля ведущая ветвь каната укладывается на бара- бане двумя или тремя витками. В процессе работы канат несколько перемещается в осевом направлении, однако вследствие формы образующей барабана он смещается к средней части. Такая конструкция барабана позволяет перемещать груз на большую длину, но ускоряет износ каната.
5
Рис.
56. Схемы шпилей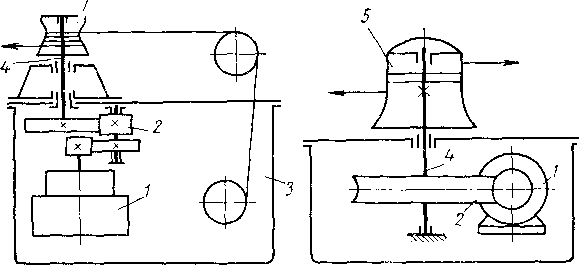
Ведомую ветвь каната натягивают вручную с усилием
р = н (кГь
где Q — тяговое усилие шпиля в н (кГ); е — основание натуральных логарифмов; г — число витков на барабане;
[х — коэффициент трения каната о барабан, оавный 0,15— 0,18.
Электрошпили создают тяговые усилия до 5 т при скорости сбегания каната 0,25—1,5 м/сек.
Подъемники бывают вертикальные и наклонные. Вертикальные подъемники применяют при подъеме слябов на установках непрерывной разливки стали. Наклонные подъемники — это скиповые подъемники типовых доменных печей, подъемники для загрузки вагранок, обжигающих доломит и др.
В вертикальных подъемниках платформа с грузом уравновешивается противовесом; в подъемниках с двумя скипами уравновешивание осуществляется порожним скипом.
Подъемники оборудованы разнообразными типами специальных лебедок. При расчете лебедки подъемника учитывают разгружающую силу противовеса
G0 = G,u + -§- н (кГ).
Окружное усилие на барабане
Р = (Q + Gnjl — С0)г]бг]н н (кГ),
где Q — вес груза в н (кГ);
Gnj — вес платформы в н (кГ);
Gо — вес противовеса в н (кГ);
% — к. п. д. блока, равный 0,98;
т)н — к. п. д. направляющих, равный 0,98.
Мощность двигателя лебедки
AT PV
N = -ГК7г квт,
102ib«
гДе Чмех — к- П. д. лебедки;
v — скорость подъема в м/сек.
Лебедки скиповых подъемников доменных печей объемом до 600 м3 имеют один электродвигатель. В современных сверхмощных и обычной мощности доменных печах объемом 1719 м3 и 2002 м3 применяют скиповые лебедки О-22,5-210 с двумя электродвигателями (рис. 57). Здесь первая цифра обозначает номер модели, вторая — вес материала в скипе в т, а третья — скорость подъема скипа в м/мин.
Лебедка имеет два электродвигателя 1 (рис. 58, а), зубчатые муфты 2, связанные с редуктором 3, который передает вращающий момент через редуктор 4 барабану 6.
Торможение производится двумя пружинными рабочими тормозами, управляемыми тормозными электромагнитами. На барабане с каждой стороны закреплены две нитки каната, которые через систему шкивов (блоков) соединены с левым и правым скипами.
Лебедка снабжена путевым контакторным выключателем 7, центробежным регулятором 8 и ограничителем 5.
Скиповые лебедки оборудованы по системе Г—Д. При их расчете необходимо определить разность усилий в канатах груженого и порожнего скипов. Статическое усилие S'm в канате груженого скипа равно сумме сил трения Р в ходовых колесах скипа и силы Т, стремящейся сдвинуть скип вниз по наклонной плоскости (рис. 58, б).
Р (Q + G) cos а ) и («-0>
Т = (Q + G) sin а н (кГ),
Кп = Р + Тн (кГ).
ось
барабана 1039,26
Г1607,33
7'33
~*1 1039,26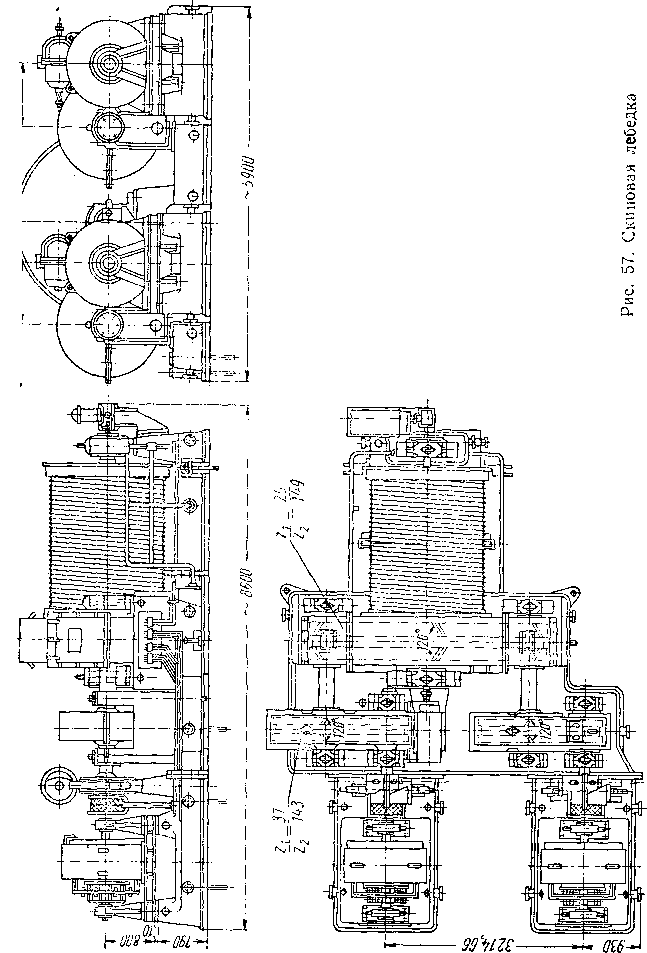
Аналогично определяют статическое усилие в канате порожнего скипа, для которого Q = 0, и находят разность усилий в канатах S = S' + S" .
cm 1 cm

Т
fcb
Sdlm
=
та
н
(кГ)\
Q
+
2 G
+
4 q
т
= — ' кг.
8
Мощность
скиповой лебедки
N
где
(S
-Ь
Sdun)
и
102t]Mex
квт
Ркс.
58. Кинематическая схема скиповой
лебедки
Динамическое
усилие определяют по основному
закону динамики как произведение массы
на ускорение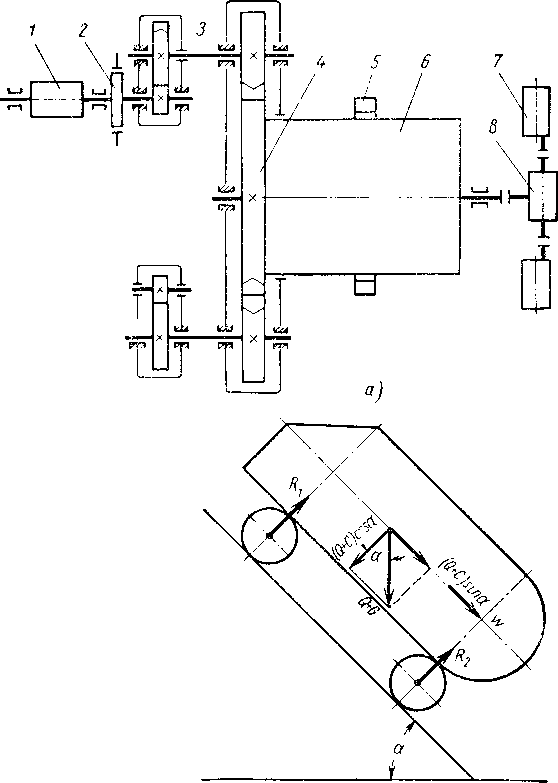
Q — вес руды в скипе в н (кГ);
G — вес скипа в н (кГ);
Р — коэффициент, учитывающий трение в ребордах (f5 = 2,5-нЗ,5);
|i — коэффициент, учитывающий трение в цапфах;
г — радиус цапфы колеса в см; f — коэффициент трения качения в см;
R — радиус ходового колеса в см; т — поступательно движущиеся массы, приведенные к окружности барабана, в кг; q — вес каната в н (кГ); g — ускорение силы тяжести в м/сек2;
2 — количество скипов;
4 — количество канатов; v — скорость движения скипа в м/сек;
Чмех — к. п. д. скиповой лебедки.