

3.2 Синтез корректирующего устройства
ЛАЧХ корректирующего устройства, найдем графическим вычитанием из ЛАЧХ желаемой ЛАЧХ неизменяемой части системы. Логарифмическая амплитудно - частотная характеристика корректирующего устройства приведена в приложении G рисунок 2.
Найдем передаточную функцию корректирующего устройства по его ЛАЧХ:
 (3.1)
(3.1)
где Т - постоянные времени
Т1 =5 с;
Т2 =41,325 с;
Т3 =4 с;
Т4 =5,6 с;
Т5 =0,1 с;
Т6 =0,14 с;
Т7 =0,05 с.
Передаточная функция синтезированного регулятора приведена в приложении H рисунок 2
3.3 Моделирование скорректированной сау
Наберем модель замкнутой скорректированной САУ и проведем динамическое моделирование в последовательности, описанной в пункте 2.5. Для анализа результатов рассчитаем:
переходную характеристику;
импульсную переходную характеристику;
расположение нулей и полюсов передаточной функции.
Эти характеристики приведены в приложении I рисунок 1, рисунок 2 и приложении К
3.4 Выводы
после включения в систему последовательного корректирующего устройства автоматическая система стала устойчивой. Это подтверждается графиками, приведенными в приложениях G рисунок 1, I рисунок 1 2, К рисунок 1.
время переходного процесса составляет 1,56 сек при заданном значении 3 сек;
перерегулирование составляет 6% при заданном значении 20 %.
Задание на курсовое проектирование выполнено полностью.
Приложение а
Р исунок 1
РИСУНОК 2
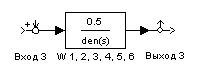
Рисунок 3
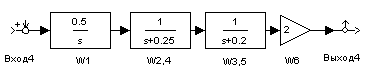
РИСУНОК 4
ПРИЛОЖЕНИЕ B
Рисунок 1
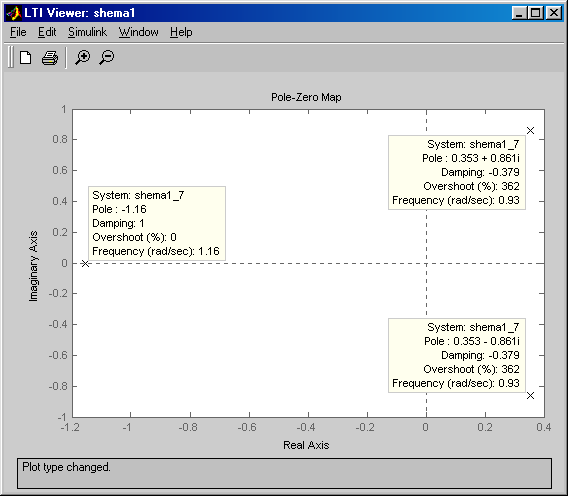
Рисунок 2
ПРИЛОЖЕНИЕ C
Рисунок 1
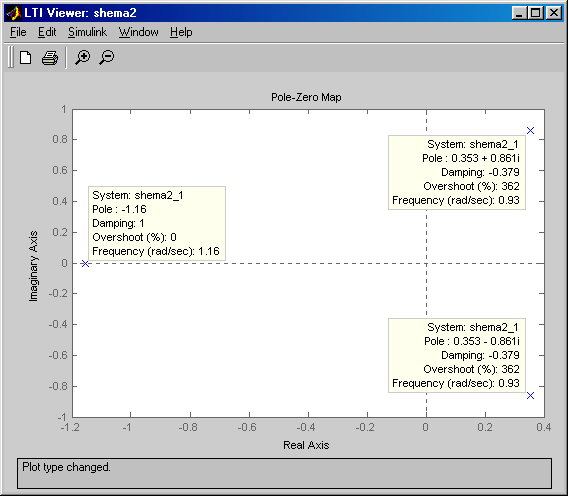
Рисунок 2
ПРИЛОЖЕНИЕ D
Рисунок 1
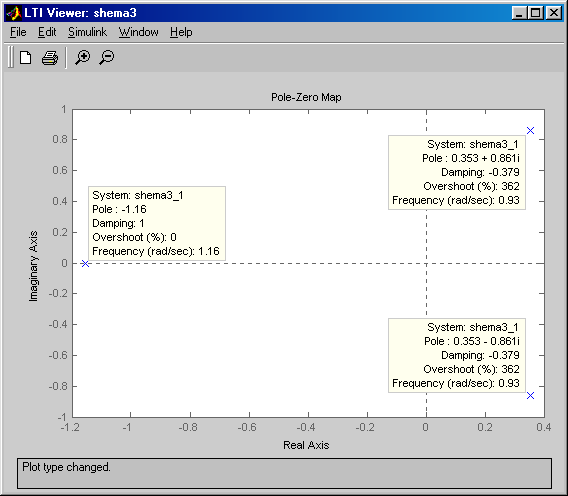
Рисунок 2
ПРИЛОЖЕНИЕ E
РИСУНОК 1
ПРИЛОЖЕНИЕ F
Логарифмическая Амплитудно - Частотная Характеристика Разомкнутой не скорректированной системы
РИСУНОК 1
ПРИЛОЖЕНИЕ G
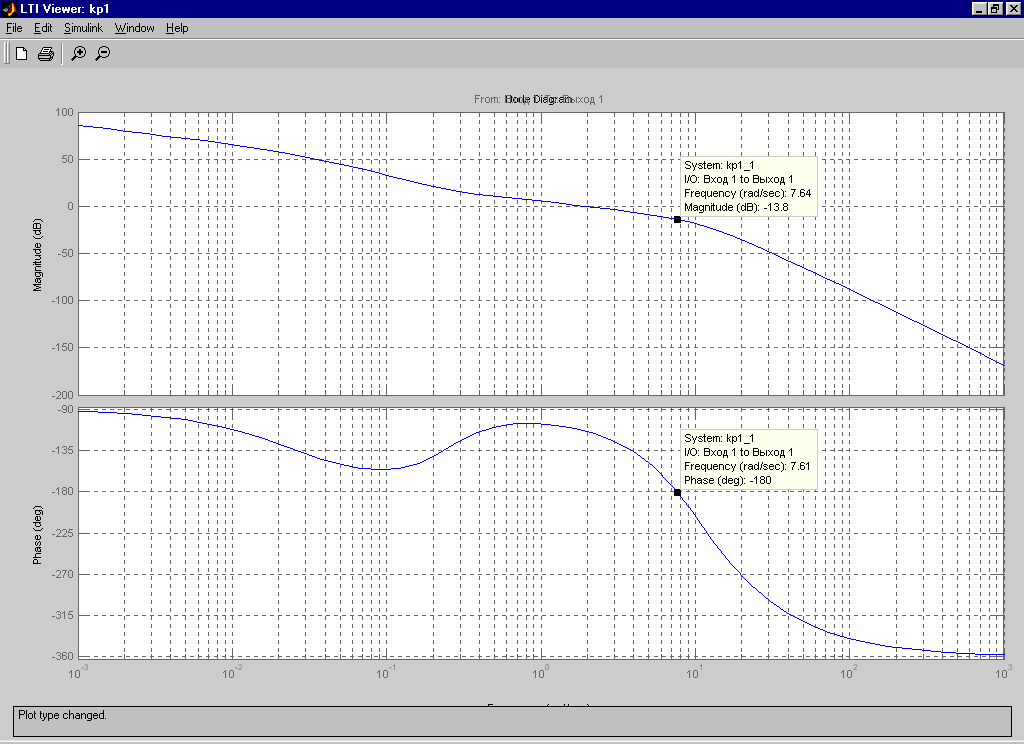
РИСУНОК 1
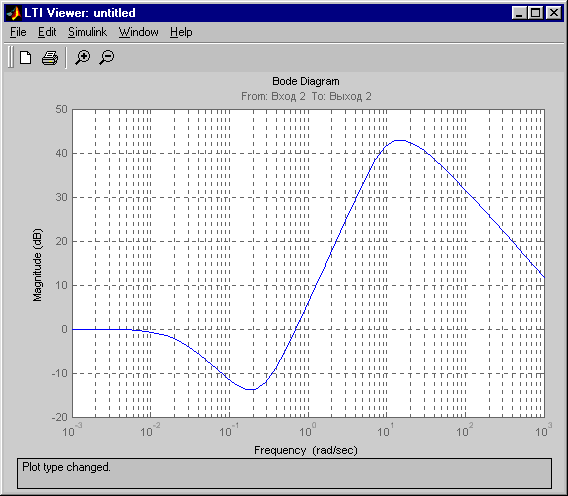
РИСУНОК 2
ПРИЛОЖЕНИЕ H
Разомкнутая схема с корректирующим звеном

РИСУНОК 1
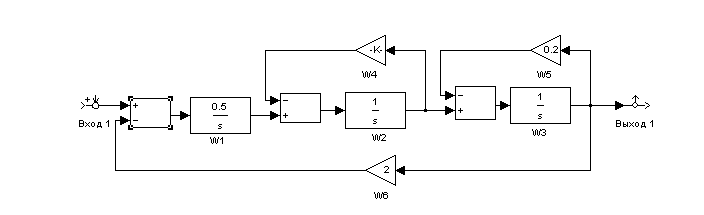
Структура регулирующего звена
![]()
РИСУНОК 2
Замкнутая схема с корректирующим звеном
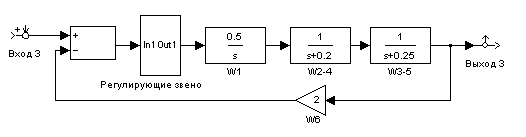
РИСУНОК 3
ПРИЛОЖЕНИЕ I
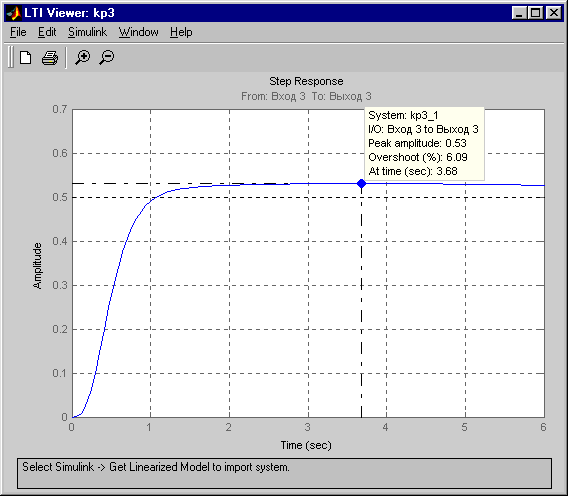
РИСУНОК 1
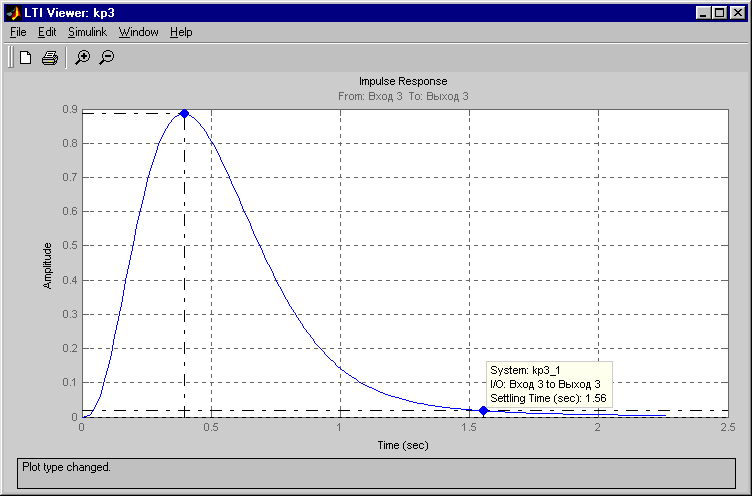
РИСУНОК 2
П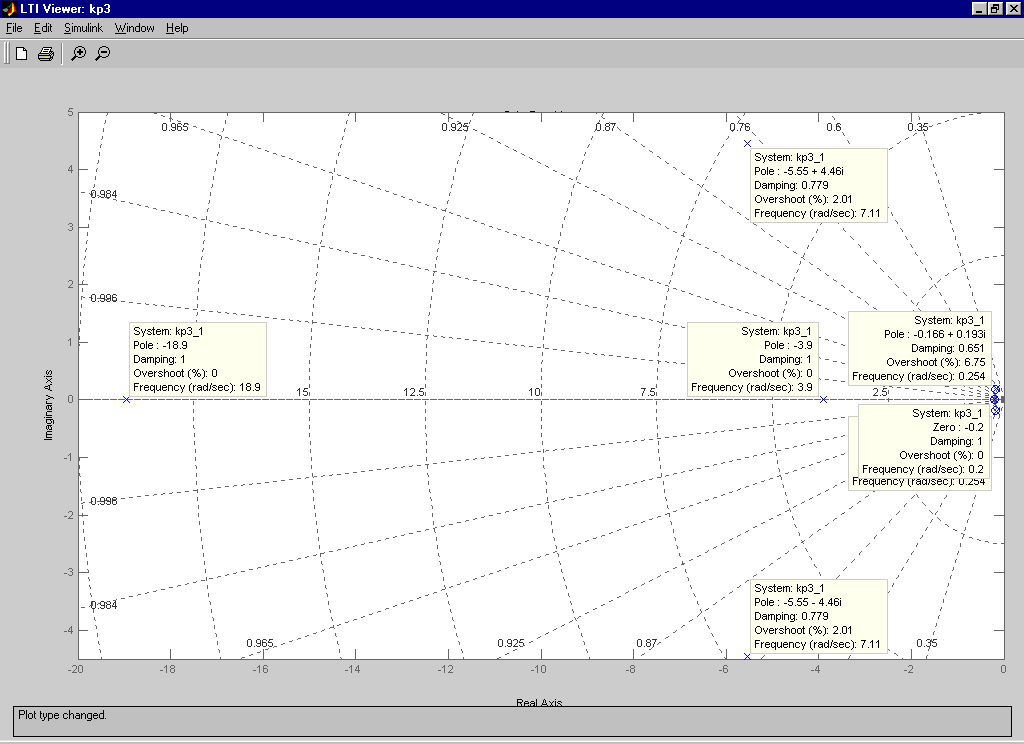 РИЛОЖЕНИЕ
К
РИЛОЖЕНИЕ
К
Рисунок 1