

2 Анализ структурной схемы автоматического управления
2.1 Исходные данные
Коэффициент передачи K1 0,5
Коэффициент передачи K2 0,25
Коэффициент передачи K3 0,2
Коэффициент передачи K4 2
Установившаяся ошибка ξ,% 0,5
Перерегулирование δ,% 20
Время регулирования t0, С 3
Оператор дифференцирования S С-1
2.2 Преобразование структурной схемы системы автоматического управления (сау)
Исходная структура состоит из трёх сумматоров, трёх интегрирующих звеньев и трёх без инерционных звеньев, приложение А, рисунок 1.
Сумматоры имеют по два входных порта и по одному выходному порту.
Интегрирующие звенья с передаточными функциями соответственно:
![]()
![]()
Безинерционные звенья с передаточными функциями соответственно:
W4=K2, W5=K3, W6=K4;
Проведем преобразование структуры (приложение А, рисунок 1) используя известные правила, которые изложены в Л.[4] В задании на проектирование динамические звенья включены встречно - параллельно и последовательно.
Для встречно параллельного включения формула преобразования имеет вид:
 (2.1)
(2.1)
где W2 - передаточная функция в прямой цепи управления;
W4 - передаточная функция в обратной цепи управления.
 (2.2)
(2.2)
где W3 - передаточная функция в прямой цепи управления,
W5 - передаточная функция в обратной цепи управления.
Определим передаточную функцию прямой цепи управления одноконтурной структурной схемы, используя правило преобразования для последовательного включения динамических звеньев:
![]()
![]() (2.3)
(2.3)
где - передаточная функция первого динамического звена;
Используя выражения 2.1 и 2.3, определим структуру одноконтурной системы управления соответствующую приложению А, рисунок 2.
Передаточная функция в обратной цепи управления для этой структурной схемы имеет вид:
W6 = К4
Определим
статическую точность исходной САУ. Для
этого проанализируем выражение 2.3. Как
видно из этого выражения в прямой цепи
управления есть интегрирующие звено
 а значит система астатическая - она не
имеет статической ошибки в установившемся
режиме.
а значит система астатическая - она не
имеет статической ошибки в установившемся
режиме.
2.3 Проверка на устойчивость заданной сау.
Приведем структуру, которая соответствует приложению А рисунок 2
к структуре, соответствующей приложению А, рисунок 3 используя следующие выражение:
 (2.4)
(2.4)

2.4 Определение устойчивости сау по критерю Гурвица
Используя критерий Гурвица и знаменатель выражения 2.4, определим устойчивость САУ. Знаменатель выражения 2.4 представляет собой характеристическое уравнение замкнутой системы. Предварительно введем следующие обозначения:
а0=1, а1=0,45, а2=0,05 а3=1.
Как видно из выражения 2.4, автоматическая система представляет собой устройство третьего порядка. В этом случаи для того, чтобы САУ была устойчивой необходимо и достаточно выполнение следующих неравенств:
а00, а10, а20, а30, (2.5)
а1*а2-а0*а30. (2.6)
Подставим значения коэффициентов в характеристические неравенства 2.5 и 2.6
10, 0,450, 0,050, 10,
0,45*0,05-1*1<0.
система не устойчива т. к. условие 2.6 не выполнено.
2.5 Моделирование исходной сау
Моделирование проводим, во первых с целью проверки правильности преобразований выполненных в пункте 2.2 и, во вторых, для анализа результатов моделирования динамических характеристик САУ.
В новой версии MatLab 6 приложение Simulink3 имеет динамическую связь с пакетом Control System Toolbox, позволяющим исследовать динамические характеристики системы. На эту связь указывает меню Tools в строке меню модели. В частности, можно получить следующие характеристики:
переходную характеристику - реакцию системы на ступенчатое единичное воздействие;
амплитудо - частотную и фазо - частотную характеристики;
расположение полюсов и нулей передаточной функции системы.
Исследуемые модели, набранные в рабочем поле модельного окна, соответствуют рисунку 1.
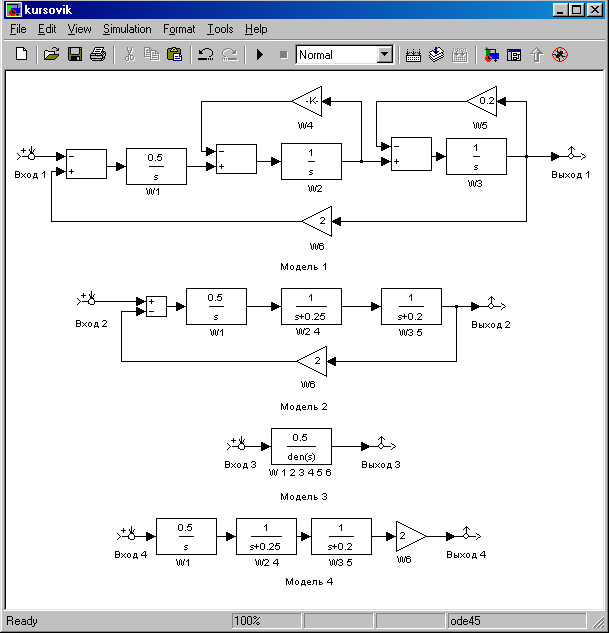
Рисунок1 - Исследуемые модели.
Процесс моделирования проводим в следующей последовательности:
в модельном окне выбираем пункт меню Tools;
в открывающемся окне меню Tools выбираем опцию Linear Analysis, при этом появляется окно дополнительной библиотеки входных и выходных портов Model Inputs and Outputsи, изображённое на рисунке 2, и пустое окно блока LTI Viewer, соответствующее рисунку 3;
входные и выходные порты, как обычные библиотечные блоки, «перетаскиваются» в окно модели и присоединяются ко входам и выходам исследуемых моделей;
проводим динамическое моделирование. Для этого в выпадающем меню Simulink окна LTI Viewer выбираем опцию Get Linearized Model.
выбираем из меню Plot Types необходимые для исследования типы характеристик.
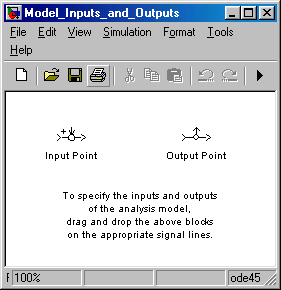
Рисунок2 - Вид окна Model Inputs and Outputs.
В окне LTI Viewer отображаются результаты моделирования.
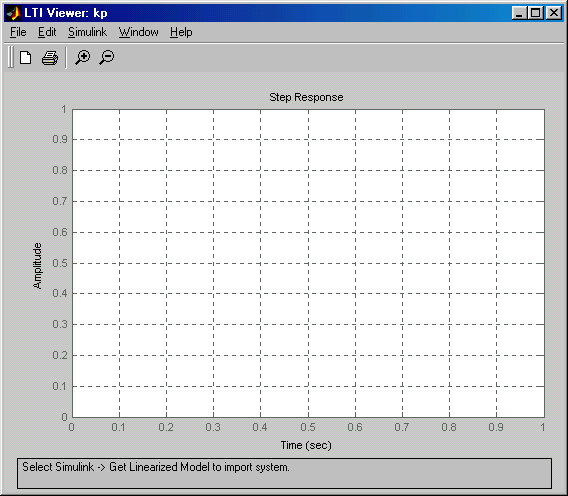
Рисунок3 - Вид окна блока LTI Viewer.
Для модели 1 выводим переходную характеристику и расположение полюсов и нулей передаточной функции системы, которые соответствуют приложению В, рисунок 1, рисунок 2.
C целью проверки правильности преобразования модели 1, выводим переходную характеристику и расположение полюсов и нулей передаточной функции модели 2, которые соответствуют приложению С рисунок 1 рисунок 2.
С целью проверки правильности преобразования модели 2, соответствующей рисунку, 1, выводим переходную характеристику и расположение полюсов и нулей передаточной функции модели 3,которые приведены в приложении D рисунок 1, рисунок 2.
Для модели 4 выводим графики амплитудно-частотной и фазо-частотной характеристик разомкнутой системы, которым соответствует приложение E