

Список литературы
Теория автоматического управления. Ч.I Теория линейных систем автоматического управления. Под.ред. А.А. Воронова. Учебное пособие для вузов. М., «Высш. школа», 1977.
Головенков С.Н. Основы автоматики и автоматического регулирования станков с программным управлением. - М., Машиностроение, 1988г.
Юревич Е.И. Теория автоматического управления. - М., «Высшая школа», 1977г.
Формулировка задания на курсовой проект
Необходимо спроектировать систему автоматического управления, удовлетворяющую следующим требованиям качества:

Варианты задания приведены в Приложении 1.
.
Приложение 1
Вариант I
Структурная схема
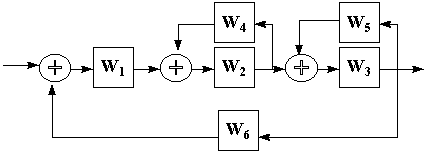
Рис.1
где:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Табл.1
№ |
k1 |
k2 |
k3 |
k4 |
|
|
t0 (c) |
1 |
1000 |
50 |
20 |
1 |
5 |
20 |
1 |
2 |
0.5 |
0.25 |
0.2 |
2 |
0.5 |
20 |
3 |
3 |
50 |
25 |
2 |
1 |
2 |
30 |
5 |
4 |
500 |
50 |
100 |
0.5 |
4 |
15 |
0.5 |
5 |
20 |
1 |
100 |
1 |
2 |
40 |
0.25 |
6 |
200 |
10 |
20 |
50 |
3 |
5 |
1 |
В табл.1 обозначены данные необходимые только для выполнения второй части курсового проекта - Синтез САУ:
t0 - время регулирования;
перерегулирование;
% - установившаяся ошибка.
Примечание: Все обратные связи на рис.1 считать отрицательными, а все сигналы, приходящие на вход сумматора по прямому каналу регулирования положительными.
Вариант II
Структурная схема
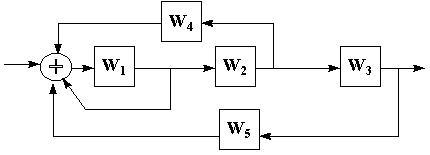
Рис.2
где:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Табл.2
№ |
T1 |
T2 |
k |
k1 |
|
|
t0 (c) |
1 |
1 |
2 |
10 |
5 |
2 |
20 |
1 |
2 |
0.1 |
0.2 |
20 |
1 |
1 |
30 |
0.5 |
3 |
0.1 |
0.15 |
1 |
1 |
3 |
10 |
1 |
4 |
0.01 |
0.01 |
100 |
2 |
2 |
25 |
0.1 |
5 |
0.25 |
0.35 |
500 |
10 |
4 |
30 |
1.5 |
6 |
0.5 |
0.5 |
5 |
1 |
5 |
20 |
1 |
В табл.2 обозначены данные необходимые только для выполнения второй части курсового проекта - Синтез САУ:
t0 - время регулирования;
перерегулирование;
% - установившаяся ошибка.
Примечание: Все обратные связи на рис.2 считать отрицательными, а все сигналы, приходящие на вход сумматора по прямому каналу регулирования положительными.
Вариант III
Структурная схема
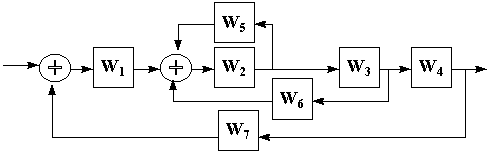
Рис.3
где:
![]() ;
;
![]() ;
;
![]() ;
;![]() ;
;
;
;
![]() ;
;
![]() .
.
Табл.3
№ |
k |
k1 |
k2 |
k3 |
|
|
t0 (c) |
1 |
1000 |
10 |
100 |
1 |
2 |
20 |
2 |
2 |
20 |
2.828 |
4 |
1 |
5 |
30 |
2 |
3 |
200 |
1 |
4 |
1 |
1 |
50 |
0.5 |
4 |
100 |
0.5 |
1 |
5 |
2.5 |
30 |
0.5 |
5 |
100 |
10 |
10 |
0.1 |
10 |
10 |
1 |
6 |
2.5 |
0.75 |
0.25 |
0.5 |
1 |
20 |
1 |
В табл.3 обозначены данные необходимые только для выполнения второй части курсового проекта - Синтез САУ:
t0 - время регулирования;
перерегулирование;
% - установившаяся ошибка.
Примечание: Все обратные связи на рис.3 считать отрицательными, а все сигналы, приходящие на вход сумматора по прямому каналу регулирования положительными.
Вариант IV
Структурная схема
Рис.4
где:
![]() ;
;
;
;
![]() ;
;
;
;
![]() ;
;
![]() .
.
Табл.4
№ |
K |
k1 |
T1 |
T2 |
T3 |
|
|
t0 (c) |
1 |
1 |
1 |
0.1 |
0.2 |
0.5 |
2 |
20 |
0.5 |
2 |
10 |
25 |
0.2 |
0.5 |
0.05 |
5 |
20 |
0.75 |
3 |
10 |
5 |
2 |
1 |
0.5 |
1 |
30 |
1 |
4 |
4 |
1 |
0.1 |
0.1 |
0.1 |
1 |
5 |
2 |
5 |
50 |
2 |
1 |
0.01 |
0.25 |
4 |
35 |
0.5 |
6 |
25 |
25 |
0.25 |
0.25 |
0.1 |
3 |
30 |
2 |
В табл.4 обозначены данные необходимые только для выполнения второй части курсового проекта - Синтез САУ:
t0 - время регулирования;
перерегулирование;
% - установившаяся ошибка.
Примечание: Все обратные связи на рис.4 считать отрицательными, а все сигналы, приходящие на вход сумматора по прямому каналу регулирования положительными.
Вариант V
Структурная схема
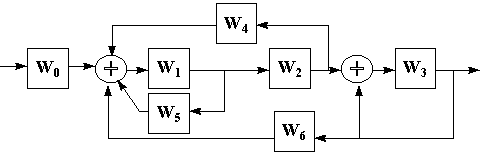
Рис.5
где:
![]() ;
;
![]() ;
;
;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Табл.5
№ |
K |
k0 |
Т |
Т1 |
|
|
|
t0 (c) |
1 |
10 |
1 |
0.5 |
1 |
0.7 |
5 |
5 |
0.5 |
2 |
60 |
2 |
0.5 |
0.1 |
0.5 |
1 |
20 |
0.25 |
3 |
200 |
10 |
0.7 |
0.1 |
0.25 |
2 |
20 |
1 |
4 |
2 |
1 |
0.5 |
0.1 |
0.75 |
5 |
20 |
0.5 |
5 |
10 |
10 |
0.1 |
0.01 |
0.707 |
5 |
30 |
1 |
6 |
7 |
1 |
0.15 |
0.01 |
1 |
3 |
30 |
0.25 |
В табл.5 обозначены данные необходимые только для выполнения второй части курсового проекта - Синтез САУ:
t0 - время регулирования;
перерегулирование;
% - установившаяся ошибка.
Примечание: Все обратные связи на рис.5 считать отрицательными, а все сигналы, приходящие на вход сумматора по прямому каналу регулирования положительными.