

1. Записать передаточные функции разомкнутой и замкнутой сау. Преобразовать структурную схему.
Заданную структурную схему путем структурных преобразований необходимо преобразовать к виду:
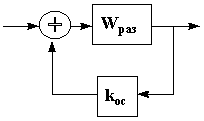
Причем передаточная функция разомкнутой САУ должна быть представлена в виде комбинации типовых звеньев, например:
 .
.
Все входящие в передаточную функцию постоянные времени должны быть определены, а для колебательного звена должен быть найден и коэффициент демпфирования.
Примечание: Если коэффициент демпфирования окажется больше 1, то передаточная функция должна быть преобразована, то есть колебательное звено должно быть заменено на два апериодических.
После этого записывается передаточная функция замкнутой САУ по формуле:
![]() .
.
При записи передаточная функция замкнутой САУ необходимо привести все выражение к общему знаменателю и раскрыть все скобки. Тем самым получится передаточная функция вида:
![]() .
.
2. Проверка сау на устойчивость.
Для всех вариантов КП передаточная функция САУ должна получаться третьего порядка. Поэтому для проверки устойчивости достаточно воспользоваться критерием Гурвица.
Для того чтобы САУ третьего порядка была устойчива необходимо и достаточно, чтобы выполнялись следующие неравенства:
![]() ;
;
![]() .
.
3. Расчет статической ошибки сау.
Ошибка САУ в установившемся режиме рассчитывается по формуле:
![]() .
.
Затем определяется необходимый коэффициент регулятора для обеспечения заданной установившейся ошибки по формуле:
![]() .
.
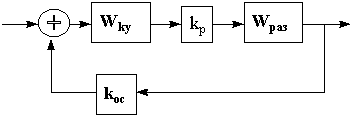
Структурная схема САУ принимает вид:
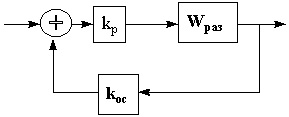
Новая САУ с учетом регулятора должна быть проверена на устойчивость также с помощью критерия Гурвица.
Динамические свойства САУ даже в том случае, если она оказалась неустойчивой могут быть улучшены только на следующем этапе при синтезе САУ.
4. Моделирование исходной сау на эвм.
Все полученные показатели должны быть подтверждены моделированием на ЭВМ с помощью программы структурного моделирования динамических объектов Matlab 6.0. Данный пункт выполняется на практических занятиях.
Примечание: Должны быть сняты переходные процессы в исходной САУ и в САУ с рассчитанным коэффициентом регулятора kp..
Часть II. Синтез сау
Строится ЛАЧХ нескорректированной САУ-
 (Рассчитанный в пункте 3 коэффициент
kp
должен быть при этом учтен).
(Рассчитанный в пункте 3 коэффициент
kp
должен быть при этом учтен).
Примечание: Все построения ЛАЧХ выполняются на разлинованной (лучше миллиметровой) бумаге.
По заданному перерегулированию из графиков (Приложение 2) определяют частоту среза c и требуемый запас устойчивости по модулю Lтр.
Примечание: Для тех вариантов, у которых заданное перерегулирование менее 18%, считать Рmax=1.
По полученным данным строится желаемая ЛАЧХ САУ -
 .
.Строится ЛАЧХ последовательного корректирующего устройства (ПКУ). Путем графического вычитания по формуле:
![]() .
.
Окончательно структурная схема САУ будет иметь вид:
По известному виду ЛАЧХ восстанавливается передаточная функция ПКУ и затем изображается итоговая структурная схема.
Проводится заключительное моделирование САУ на Matlab 6.0 с целью подтверждения правильности синтеза - итоговые переходные процессы должны полностью удовлетворять требованиям к качеству САУ (скорректированная САУ должна быть устойчивой).