

Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Костромской государственный технологический университет
Кафедра автоматики и микропроцессорной техники
И.П. Байков, Е.В. Саликова
Методические указания
к выполнению лабораторных работ ТИ-2-1, ТИ-2-2
Поверка автоматических электронных мостов

Кострома
2006
УДК
Поверка автоматических электронных мостов: методические указания/ И.П.Байков, Е.В.Саликова. – Кострома: КГТУ, 2006. – 16 с.
Методические указания предназначены для выполнения лабораторных работ по поверке электронных автоматических мостов, содержат краткие теоретические сведения по данной теме, методику поверки прибора. Для студентов неэлектротехнических специальностей вуза, изучающих дисциплины «Автоматика и автоматизация технологических процессов», «Управление техническими системами».
Рецензент: к.т.н., профессор кафедры электротехники и электромеханики В.П.Чулков
Рассмотрено и рекомендовано к изданию редакционно-издательским советом КГТУ
© Костромской государственный технологический университет, 2006
Требования техники безопасности при выполнении лабораторных работ.
При выполнении лабораторной работы следует помнить, что напряжение выше 42 В опасно для жизни. Лабораторные работы проводятся при напряжении 220 В.
ПОЭТОМУ НЕОБХОДИМО:
Перед началом работы убедиться в отсутствии напряжения на зажимах стенда, наличие напряжения показывается горящей красной лампой.
Убрать с рабочего стола все посторонние предметы: сумки, дипломаты и другие вещи.
Собрать электрическую схему, необходимую для проведения эксперимента.
Получить разрешение на включение схемы. Без проверки схемы преподавателем включение схемы под напряжением КАТЕГОРИЧЕСКИ ЗАПРЕЩЕНО.
После включения схемы приступить к выполнению эксперимента.
Во время выполнения эксперимента ЗАПРЕЩАЕТСЯ:
Прикасаться к токоведущим частям электрооборудования.
Производить изменения схемы, включение приборов, аппаратов.
Оставлять без присмотра лабораторную работу.
Отвлекаться и отвлекать других.
ПО ОКОНЧАНИИ РАБОТЫ:
Отключить схему.
Доложить преподавателю об окончании работы.
После проверки преподавателем результатов эксперимента по разрешению преподавателем схему разобрать: провода, приборы, элементы электрооборудования и мебель возвратить на место.
Краткие теоретические сведения
Мостовая измерительная схема – одна из наиболее распространенных измерительных схем при автоматическом контроле параметров технологических процессов. Она является измерительной схемой для первичного измерительного преобразователя (ПИП). Параметрические ПИП часто включают в мостовые схемы, в которых текущее значение параметра ПИП сравнивается с заданным его значением (уравновешенные мосты) или в измерительной диагонали моста образуется напряжение, функционально связанное с изменением контролируемого параметра технологического процесса (неуравновешенные мосты). На рис.1.а представлена уравновешенная мостовая измерительная схема, а на рис.1.б – неуравновешенная. Питание этих систем осуществляется от источника постоянного тока с напряжением Uo. При уравновешенной мостовой схеме (см. рис.1.а) применяется нулевой метод измерения тока диагонали: изменение параметра ПИП (сопротивление, индуктивность, емкость) компенсируется изменением сопротивления другого плеча до момента полного исчезновения тока в диагонали АВ.
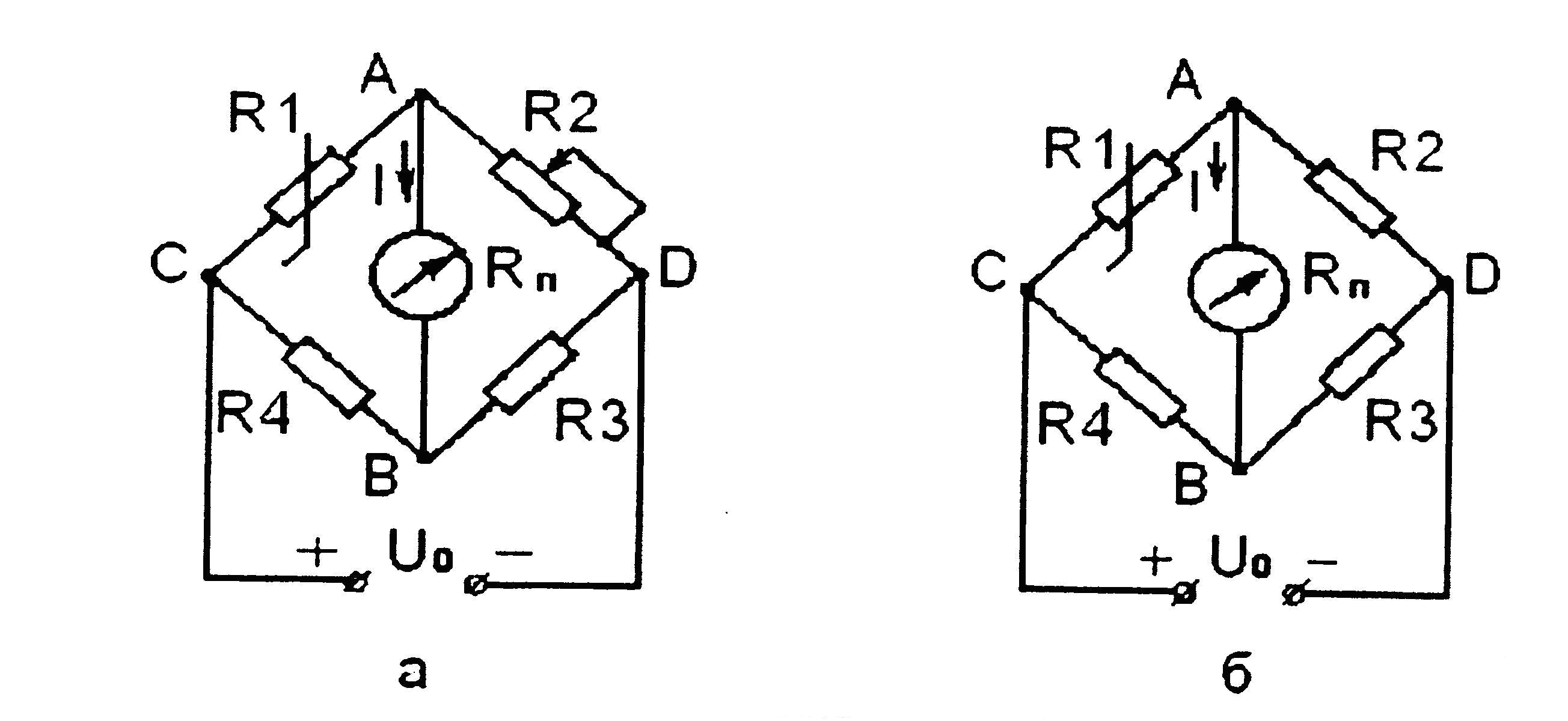
Рис.1. Мостовые схемы: а – уравновешенная; б – неуравновешенная
Ток в измерительной диагонали будет отсутствовать при условии:
R1∙R3=R2∙R4.
Это выражение является условием равновесия моста. В неуравновешенной мостовой схеме (см. рис.1.б) непосредственно оценивается ток или напряжение в измерительной диагонали для изменения параметра технологического процесса. В этом случае шкала стрелочного показывающего прибора должна быть предварительно проградуирована в тех единицах, в которых измеряется данный параметр. Данная схема уступает в точности уравновешенной мостовой схеме, т.к. на результат измерения влияет колебание напряжения питания Uo и не используется образцовая мера. Достоинством данной схемы является быстродействие. Электронные автоматические мосты с записью на диаграмме служат для измерения, записи и регулирования температуры.
ПИП в нашем случае является термометр сопротивления. Принцип действия термометров сопротивления основан на изменении активного сопротивления проводников или полупроводников при изменении температуры. Каждому значению температуры соответствует вполне определенное значение сопротивления, и измерение температуры сводится к измерению активного сопротивления проводника электрическому току. Автоматические мосты работают в комплекте с термометрами электрического сопротивления стандартных градуировок 1П 5П 10П 50П 100П (22) 500П и 5М 10М 50М 100М. Обозначения: П – платиновые; М – медные термометры сопротивления. Сопротивление чистой меди в интервале температур от –50 до +150 оС изменяется по линейной зависимости
Rt= Rо(1+t),
где Rо – сопротивление при t=0оС; Rt – сопротивление при температуре t; – температурный коэффициент сопротивления, равный для меди 4,26∙10-3 1/оС.
Для платины изменение сопротивления в зависимости от температуры выражается более сложной, нелинейной зависимостью
Rt = Rо (1+αt+βt2), при 0оСt650оС,
где и β – постоянные коэффициенты, зависящие от марки платины. На рис. 2 показаны кривые изменения электрического сопротивления меди (а) и платины (б) в зависимости от температуры.
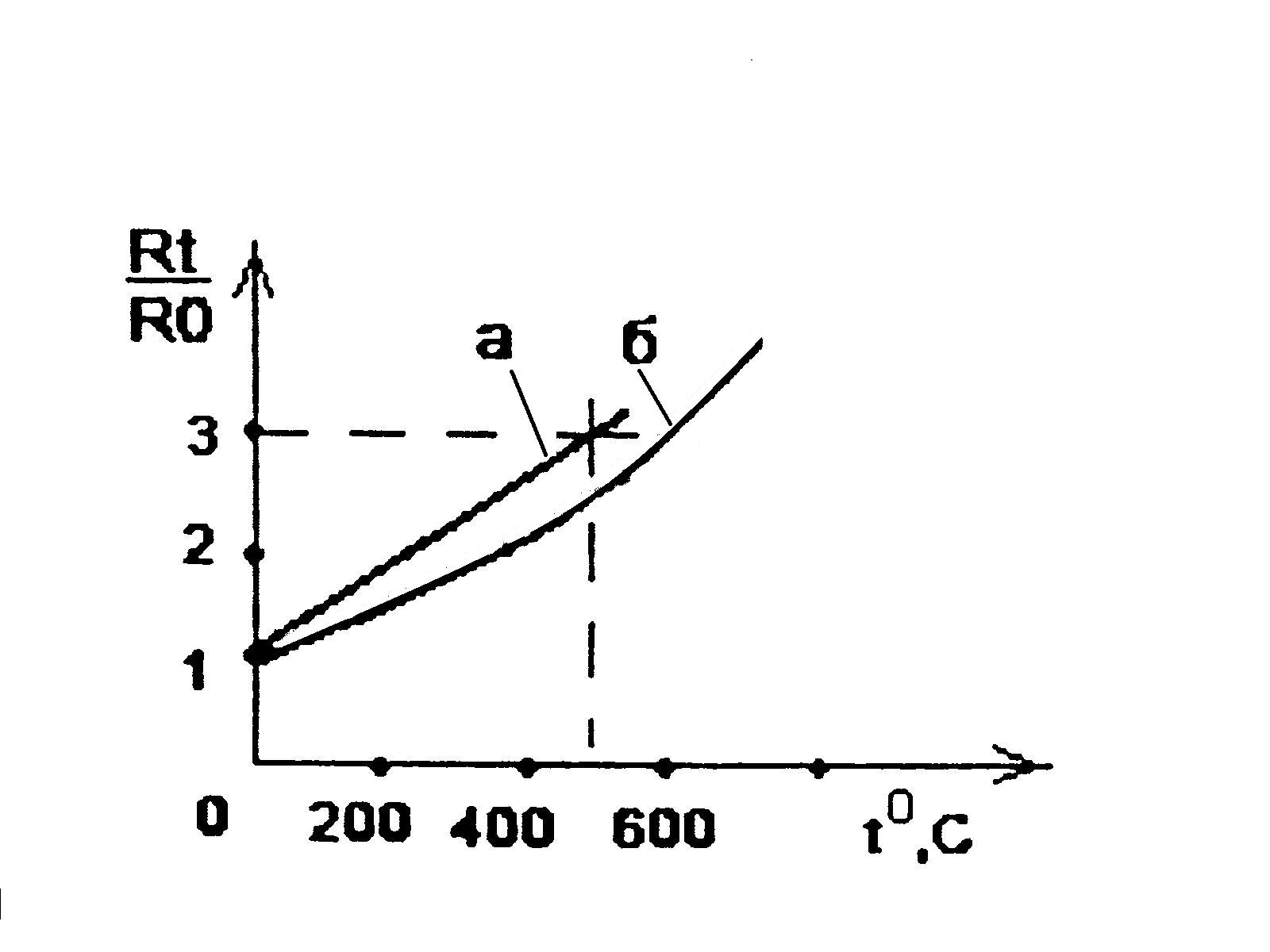
Рис. 2. Зависимость сопротивления термометра от температуры:
а – для меди; б – для платины
Чувствительный элемент как медного, так и платинового термометров сопротивления представляет собой тонкую проволоку, бифилярно намотанную на специальный каркас. Для придания элементу механической прочности каркас с обмоткой помещается между двумя промежуточными слюдяными пластинами, которые скрепляются серебряной лентой. Выводы от чувствительного элемента выполнены из серебряной проволоки и изолируются фарфоровыми бусами. Образовавшаяся конструкция помещается в тонкостенную алюминиевую трубку и закладывается во внешний защитный чехол из нержавеющей стали. Выводы от чувствительного элемента присоединяются к зажимам на головке термометра.
Автоматические уравновешенные мосты выпускаются следующих габаритов: КСМ-1 – миниатюрные, КСМ-2 – малогабаритные, КСМ-3 – малогабаритные с дисковой диаграммой, КСМ-4 – полногабаритные.
В основу работы автоматического моста положен принцип измерения сопротивления методом равновесного моста. Принципиальная схема измерения прибора изображена на рис. 3.
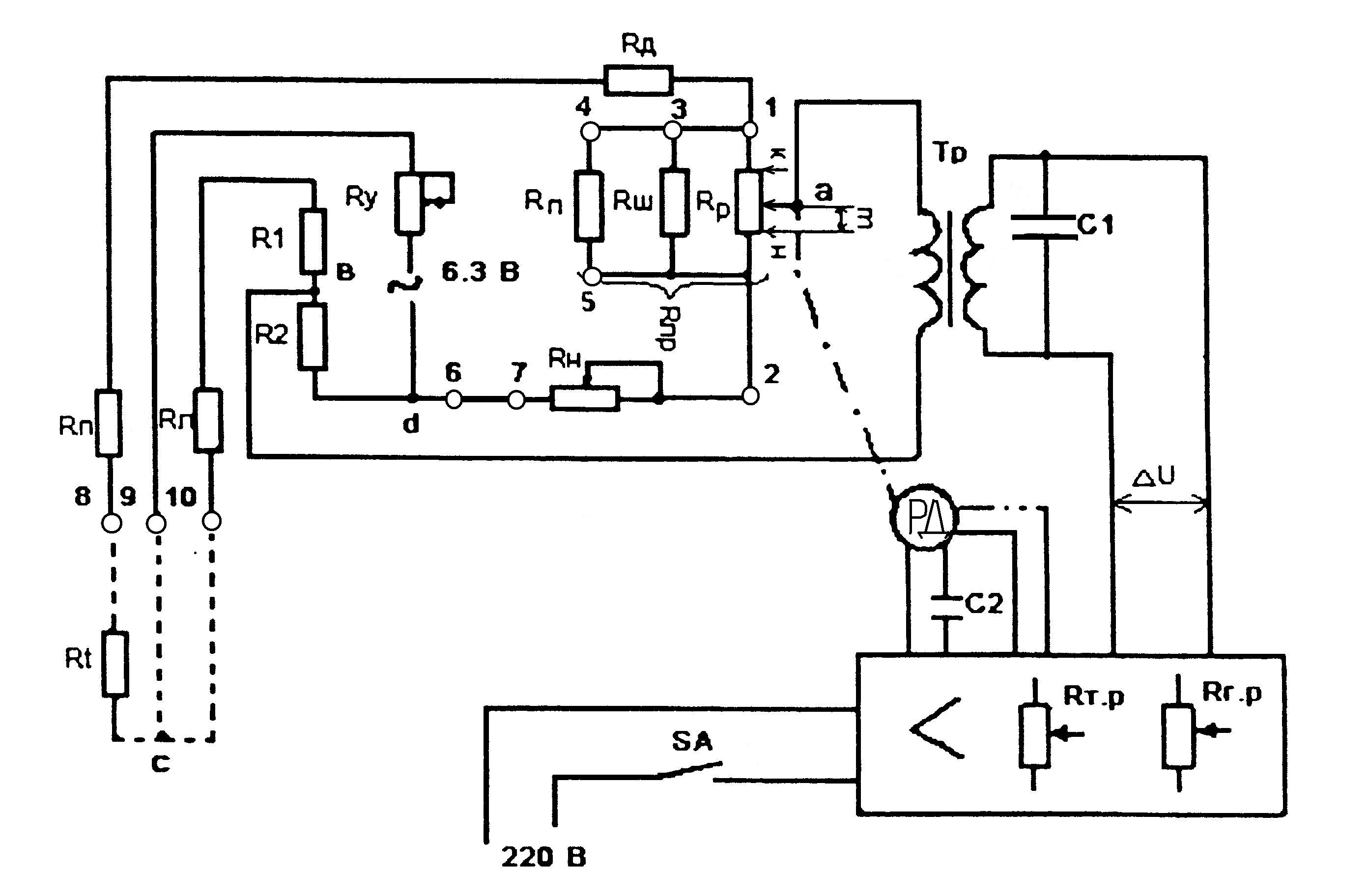
Рис.3. Принципиальная схема автоматического электронного моста
Электронные автоматические мосты работают следующим образом.
В одно из плеч мостовой равновесной схемы включен термометр сопротивления Rt. Подключение термометра сопротивления к прибору производится по трехпроводной схеме. В этом случае сопротивление проводов, служащих для присоединения термометра сопротивления к прибору распределяется между двумя прилегающими плечами моста, в которых находится соответственно термометр Rt, и резистор R1. Применение трехпроводной схемы включения термометра сопротивления снижает величину температурной погрешности, вызванной изменением сопротивления RЛ соединительных проводов при изменении температуры окружающей среды.
При изменении температуры контролируемого объекта сопротивление термометра Rt изменяется на величину Rt. Следовательно, в диагонали АВ мостовой схемы появится напряжение, которое с помощью электронного усилителя увеличивается до величины, достаточной для приведения в действие реверсивного двигателя РД. Он работает до тех пор, пока не устранит сигнал небаланса U. В этот момент уравнение равновесия измерительной схемы имеет вид:
(Rt + Rл + Rд+(1–m) ∙ Rпр ) ∙ R2 = Rн ∙ ( R1 + Rл ). (1)
Двигатель через механическую передачу связан с движком реохорда и стрелкой прибора. Таким образом, при вращении двигателя перемещается движок реохорда до наступления равновесия мостовой схемы, U становится равным нулю, двигатель останавливается, а стрелка показывает на шкале значение измеряемой величины.
Измерительный мост состоит из элементов, имеющих следующие назначение:
R1, R2 – постоянные сопротивления;
Rн – сопротивление, служащее для изменения начала шкалы;
Rп – сопротивление, служащее для подгонки приведенного сопротивления RПР к расчетному значению;
Rд – сопротивление добавочное;
Rл – сопротивление, служащее для подготовки сопротивления соединительных линий;
Rt – термометр электрического сопротивления;
Rу – сопротивление установки рабочего тока схемы
Rгр; Rтр – потенциометры грубой и точной регулировки чувствительности;
Rш – сопротивления шунта реохорда;
Rпр – приведенное сопротивление реохорда;
m – доля приведенного сопротивления;
Rр – стандартное сопротивление реохорда – образцовая мера;
Rэкв – эквивалентное сопротивление реохорда (для КСМ-4 Rэкв=90 Ом).
![]() .
.
Поверка автоматического электронного моста предусматривает определение величины абсолютной погрешности для каждой поверяемой точки. Абсолютной погрешностью измерения называется разность между показаниями прибора и истинным (действительным) значением измеряемой величины. Так как истинное значение измеряемой величины неизвестно, в технике для оценки величины пользуются понятием действительного значения измеряемой величины (Хд), которое получают с помощью образцовых приборов. выражается в показаниях измерительного прибора.
1= Rt– Rt1 ; (2)
2= Rt – Rt2 , (3)
где 1 и 2- абсолютная погрешность при прямом и обратном ходе, Ом; Rt – сопротивление термометра при данной температуре по градуировочной таблице П1; Rt1 и Rt2 – сопротивления при прямом и обратном ходе, устанавливаемые на образцовом магазине сопротивлений для каждой проверяемой точки.
Для оценки точности измерения удобней пользоваться относительной погрешностью.
Относительной погрешностью измерения называется отношение абсолютной погрешности к действительному значению измеряемой величины, выраженное в процентах,
![]() .
.
Затем необходимо определить величину максимально допустимой абсолютной погрешности автоматического электронного моста по формуле:
![]() ,
(4)
,
(4)
где Rtmах – сопротивление термометра, соответствующее верхнему пределу шкалы прибора, Ом; Rtmin – сопротивление термометра, соответствующее нижнему пределу шкалы прибора, Ом; к – класс точности прибора.
Класс точности прибора равен максимально допустимой приведенной погрешности пр.max.
![]() ,
,
где Хn – нормирующее значение. За нормирующее значение принимают диапазон шкалы прибора, если она имеет нулевую отметку (на краю или внутри шкалы); конечное значение рабочей части шкалы, если нулевая отметка находится вне шкалы.
Определение пригодности автоматического моста к эксплуатации следует произвести двумя способами:
1. Сравнением вычисленной максимальной погрешности
![]() (5)
(5)
и приведенной вариации
 (6)
(6)
с классом точности прибора. При этом должны соблюдаться условия:
![]() ,
(7)
,
(7)
![]() .
(8)
.
(8)
Вариацией показаний называется разность отдельных показаний прибора, соответствующих одному и тому же значению измеряемой величины, полученных при приближении к нему как от меньших значений к большим, так и от больших к меньшим (при прямом и обратном ходе); ε – приведенная относительная вариация показаний:
![]() ,
,
где - максимальная разность показаний прибора при прямом и обратном ходе.
2. Сравнением вычисленной максимальной абсолютной погрешности и максимальной вариации с максимально допустимой абсолютной погрешностью, определенной соответственно классу точности прибора.