

1.8 Логарифмические характеристики
Имеем передаточную функцию разомкнутой системы:
![]()
Построим ЛАХ и ЛФХ в командном режиме среды MatLab:
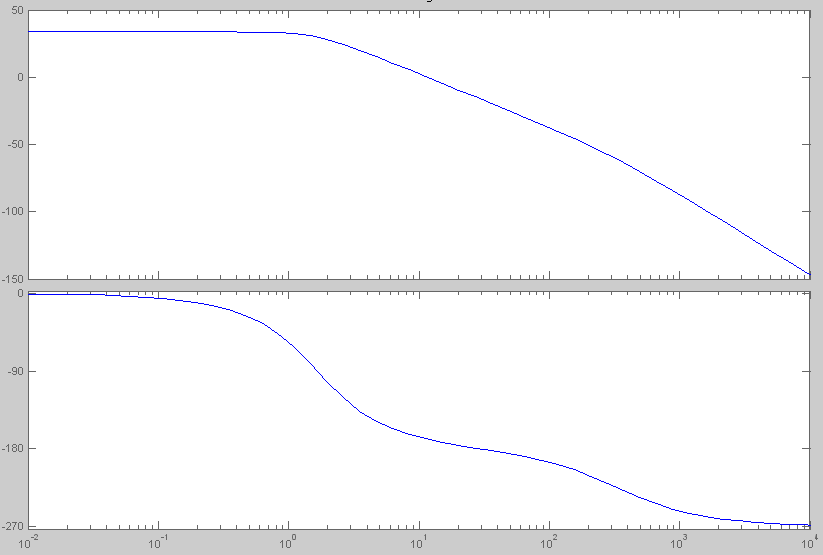
Рис. 1.11 ЛАХ и ЛФХ разомкнутой системы
По полученным ЛАХ и ЛФХ можно судить об устойчивости разомкнутой системы. Разомкнутая система неустойчива, так как ЛФХ достигает значение –180 град при положительных значениях ЛАХ. ЛАХ не удовлетворяет критерию устойчивости Найквиста-Михайлова.
1.9 Корректирующее звено
Для синтеза корректирующего устройства будем использовать среду MatLab 6 и программу AmLAHX 1.1 RC.
Для построения корректирующего звена необходимо построить ЛАХ желаемой разомкнутой системы, параметры быстродействия, параметры качества и устойчивость которой удовлетворяют поставленным требованиям.
Для построения желаемой ЛАХ найдем желаемою частоту среза. Чем больше частота среза желаемой ЛАХ, тем быстрее система реагирует на входное воздействие. К тому же, частота среза должна быть численно меньше, но как можно ближе к значению коэффициента усиления, потому что быстродействие зависит от того, как временные постоянные (характеризующиеся частотой среза) компенсируют «большой» коэффициент усиления.
Итак, выбираем частоту среза:
Проводим линию с
наклоном
![]() ,
набираем запасы по фазе:
,
набираем запасы по фазе:
![]()
Далее слева
проводим линию с наклоном
![]() до пересечения с линией, характеризующей
коэффициент усиления - линия, проходящая
через
до пересечения с линией, характеризующей
коэффициент усиления - линия, проходящая
через
![]() и имеющая нулевой наклон. Справа повторяем
наклон располагаемой л.а.х. - линия с
наклоном
и имеющая нулевой наклон. Справа повторяем
наклон располагаемой л.а.х. - линия с
наклоном
![]() .
.
Таким образом, определяем частоты изломов и временные постоянные передаточной функции желаемой системы:
 (1.9.1)
(1.9.1)
Желаемая передаточная функция разомкнутой системы:
 , (1.9.3)
, (1.9.3)
где
![]()
![]() (1.9.4)
(1.9.4)
1. Запускаем программу AmLAHX в среде MatLab 6.
amlahx(3)
2. Вводим нашу передаточную функцию и желаемые параметры качества системы.
3. Результатом выполнения программы будут ЛАЧХ и передаточная функция корректирующего устройства.
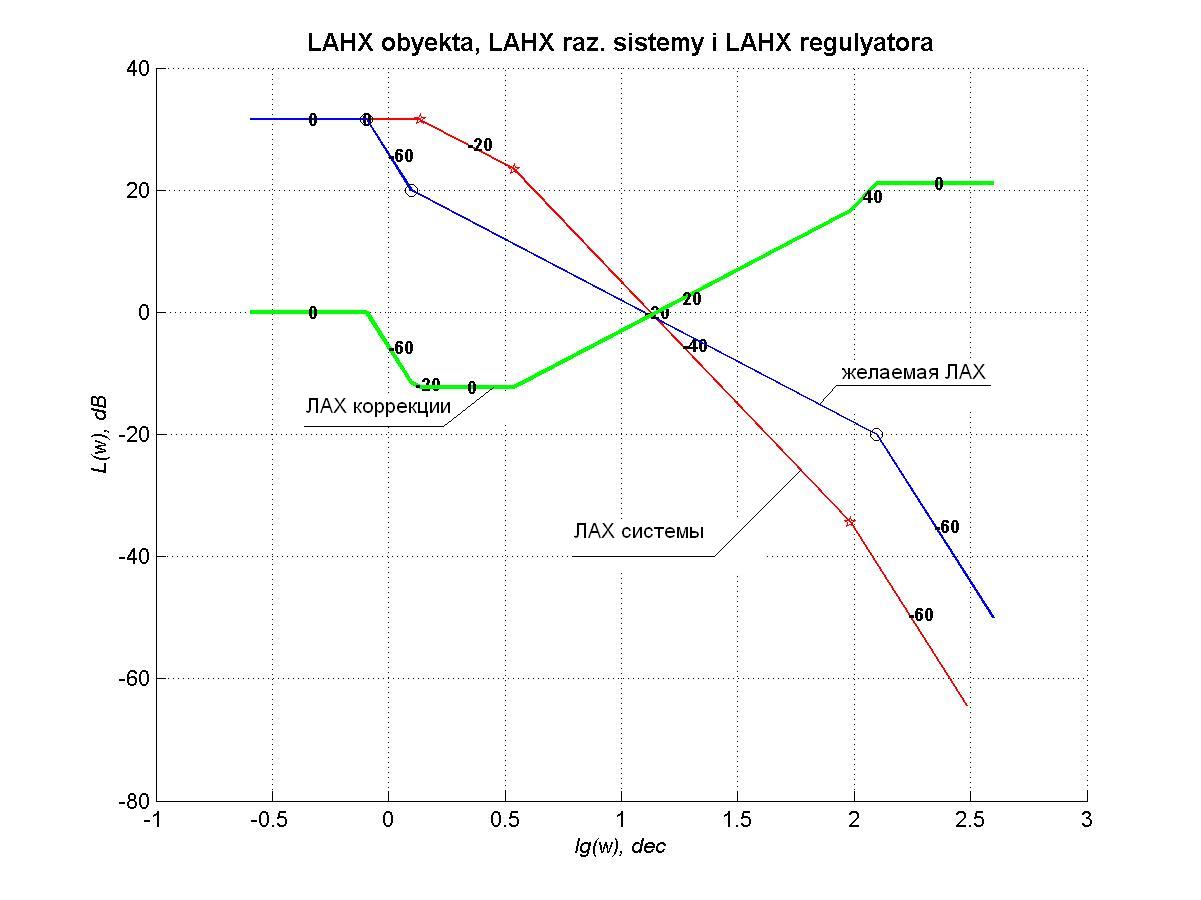
Рис. 1.12 ЛАХ разомкнутой системы, желаемая ЛАХ, ЛАХ коррекции
Построим для нее диаграмму Боде (рис. 1.13):
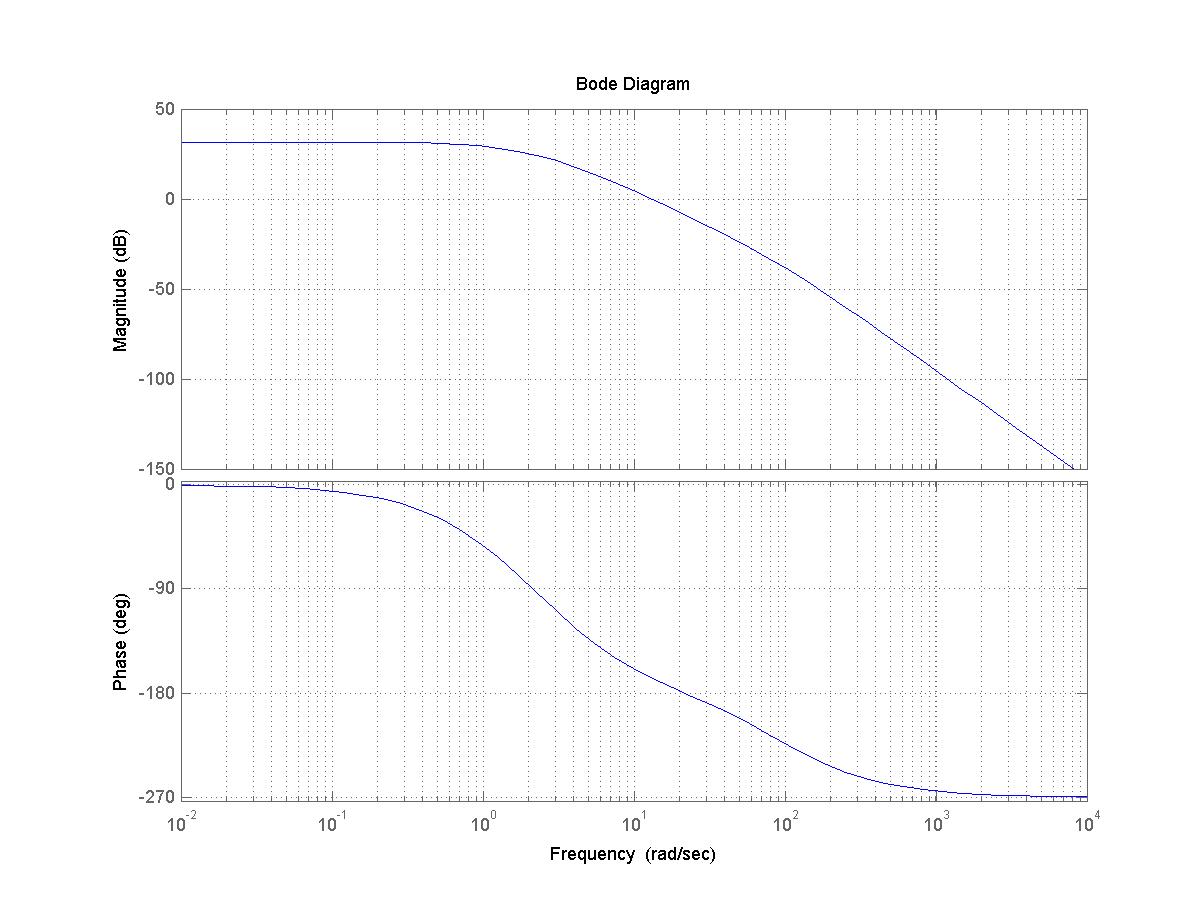
Рис.1.13 Желаемая ЛАХ и ЛФХ
По полученной желаемой ЛАХ строим ЛАХ коррекции и передаточную функцию последовательного корректирующего звена.
Передаточная функция корректирующего звена:

![]() (1.9.5)
(1.9.5)
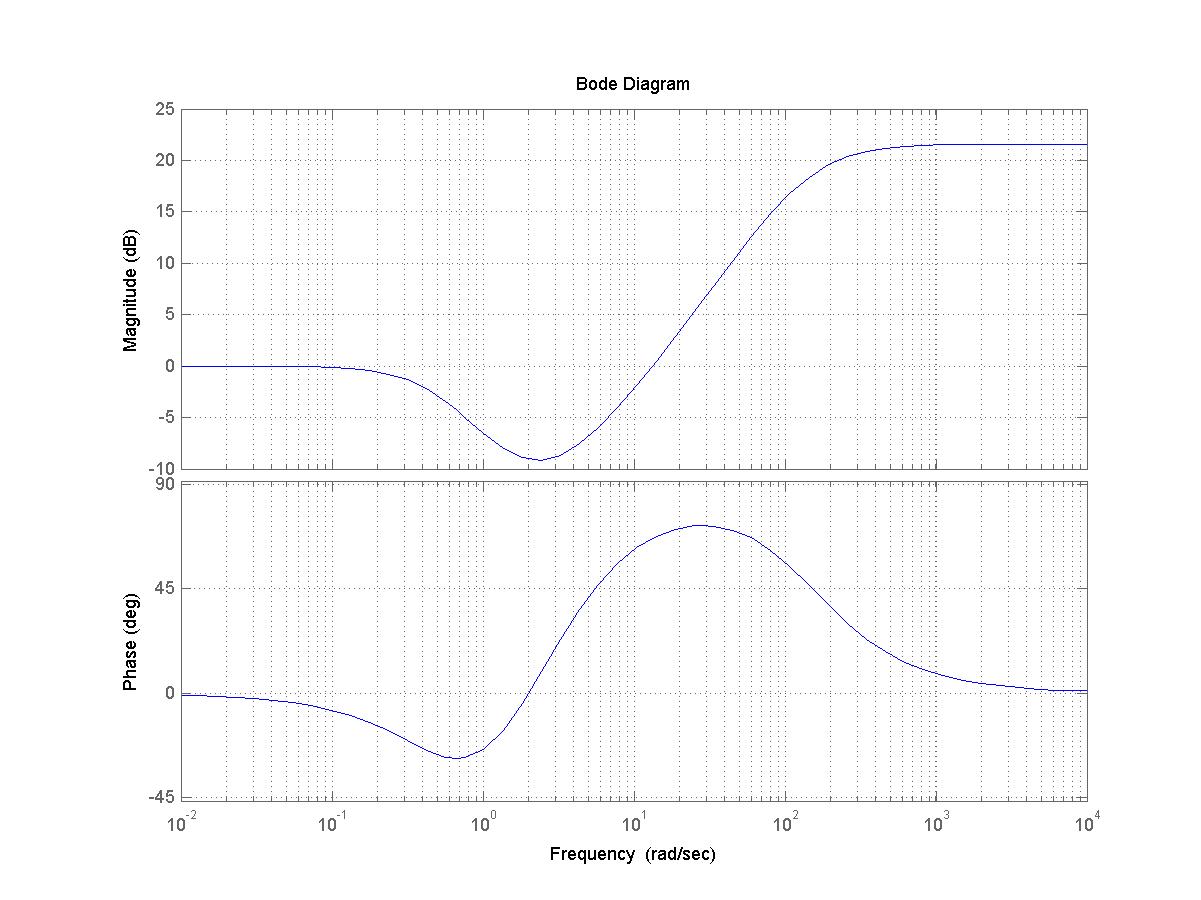
Рис. 1.14 Диаграмма Боде пассивного корректирующего звена
Разбивая передаточную функцию корректирующего звена, получаем 3 дифференцирующих(W1, W2, W3) и 2 интегрирующих (W4,W5) звена:
![]()
![]()
![]()
![]()
![]() (1.9.6)
(1.9.6)
Рассчитаем параметры каждого звена (номиналы конденсаторов берем произвольно)
1)
![]()
![]() - значит, звено обладает интегрирующим
свойством:
- значит, звено обладает интегрирующим
свойством:
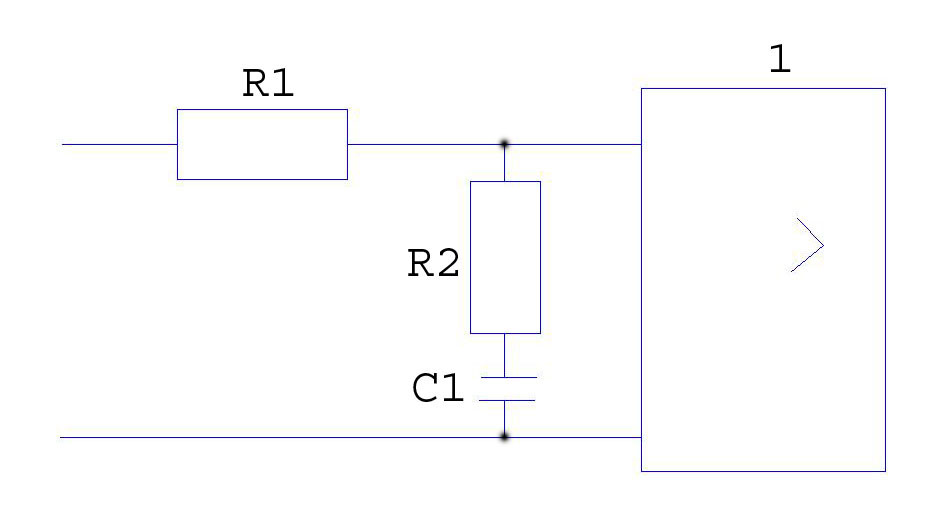
Рис. 1.15 Схема пассивного интегрирующего звена
![]()
![]() возьмем
возьмем
![]() ,
тогда
,
тогда
![]()
Так как
![]() ,
то
,
то
![]()
2)
![]() - значит, звено обладает интегрирующим
свойством:
- значит, звено обладает интегрирующим
свойством:
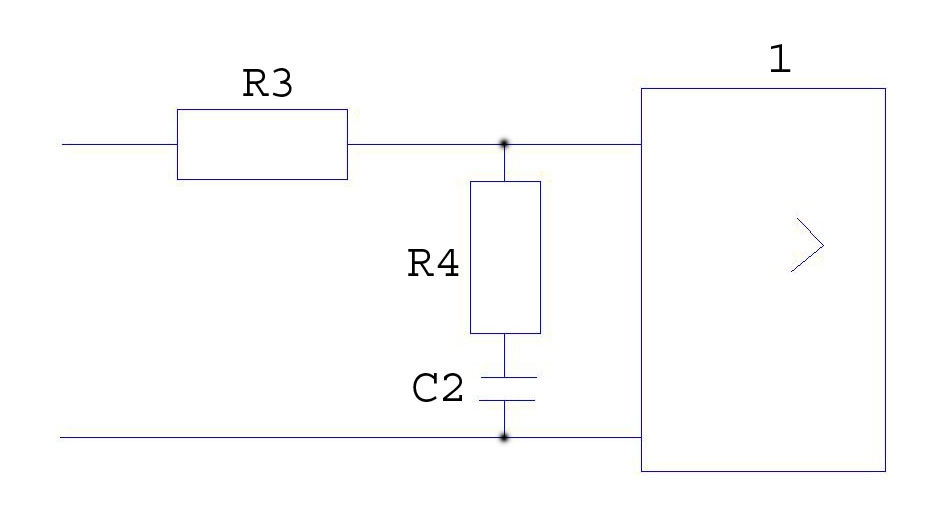
Рис. 1.16 Схема пассивного интегрирующего звена
![]() возьмем
возьмем
![]() ,
тогда
,
тогда
![]()
Так как
![]() ,
то
,
то
![]()
3)
![]()
![]() - значит, звено обладает интегрирующим
свойством:
- значит, звено обладает интегрирующим
свойством:
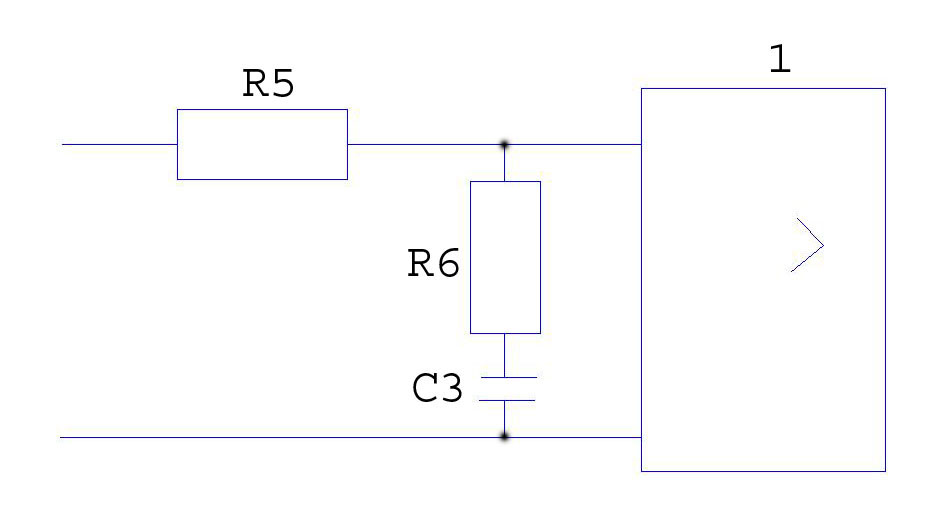
Рис. 1.17 Схема пассивного интегрирующего звена
![]()
![]() возьмем
возьмем
![]() ,
откуда:
,
откуда:
![]()
![]()
4)
![]()
![]() - следовательно, звено обладает
дифференцирующим свойством:
- следовательно, звено обладает
дифференцирующим свойством:
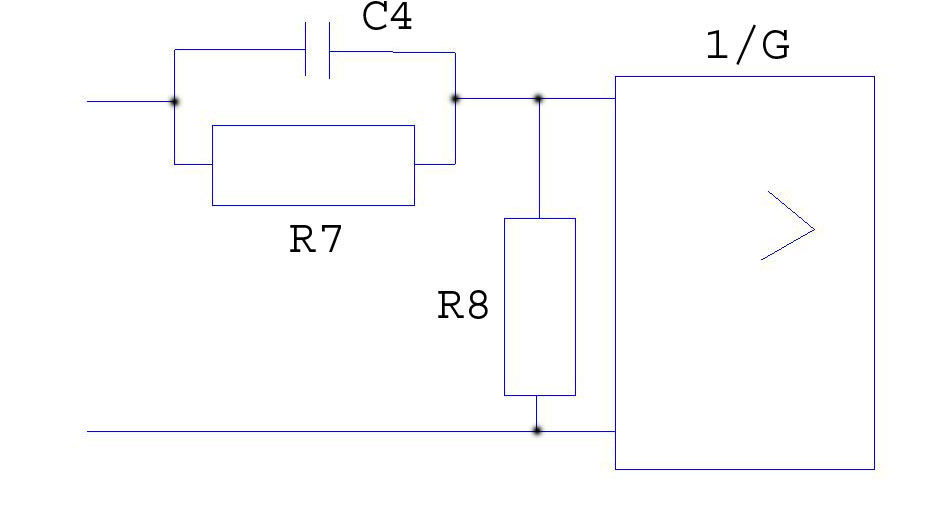
Рис. 1.18 Схема 1-го пассивного дифференцирующего звена
![]()
![]() ,
тогда
,
тогда
![]()
![]()
![]()
5)
![]()
![]() - дифференцирующее звено
- дифференцирующее звено
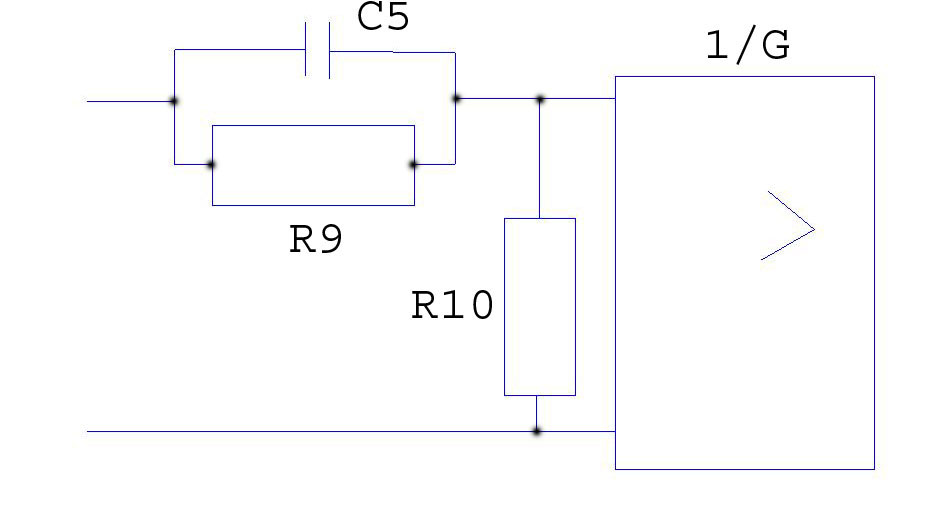
Рис. 1.19 Схема 1-го пассивного дифференцирующего звена
![]()
![]()
![]()
![]()
Подставляя наши временные постоянные каждый раз для каждого контура, получаем схему (рис. 1.12)
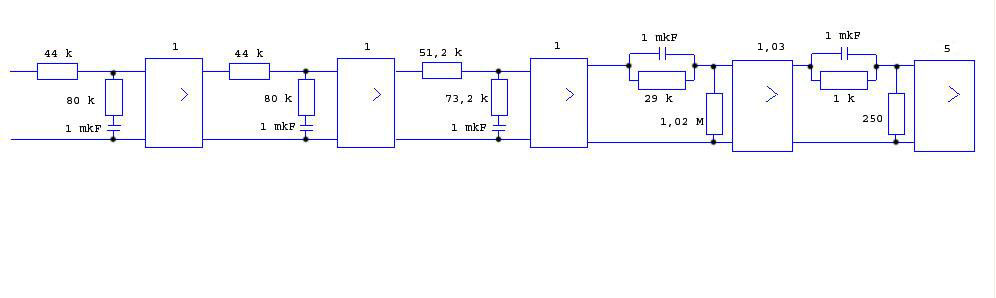
Рисунок 1.20 схемная реализация пассивного корректирующего звена
Таким образом, получившееся корректирующее звено, при включении его в систему, будет повышать качество переходного процесса.
Спроектированное звено предлагается включать в цепь усиления, то есть либо перед электронным усилителем, либо после него, либо непосредственно в электронную схему усилителя.